ROS 2服务-services-

视频教程(Linux):https://www.bilibili.com/video/BV1WT4y177dK/
本节详细介绍服务service。
1. 如何理解服务service:
服务是ROS图中节点通信的另一种方法。 服务基于调用-响应模型,不同于主题的发布-订阅模型。 主题实现节点订阅数据流并获得连续更新,但是服务仅在客户端专门调用它们时才提供数据。
注意:本教程中提到的一些概念(例如节点和主题)已在前序教程中介绍。本节需要turtlesim包。 与往常一样,请不要忘记在打开的每个新终端后更新ROS 2。Linux:source;windows:call。
2. 服务service有哪些命令功能:
使用帮助命令:
ros2 service -h
显示如下:

命令有:
- call:调用服务
- find:列出给定类型服务
- list:列出活动服务表
- type:输出服务类型
具体各命令使用细节,使用 ros2 service <command> -h 进行查阅。
3. 服务命令实践
如之前一样,先开启:
-
ros2 run turtlesim turtlesim_node -
ros2 run turtlesim turtle_teleop_key
3.1 列表
看看有哪些服务被启动了?
ros2 service list

看到两个节点都具有相同的六个服务,它们的名称带有参数。 ROS 2中几乎每个节点都具有类似结构。 在下一个教程中将有更多关于参数的信息。 在本教程中,将不讨论服务中的参数。
针对其中一些服务进行学习,如果感觉不熟练,推荐复习一下turtlesim和rqt简介教程。
3.2 类型
服务的数据类型采用具有描述服务请求和响应的结构。 服务类型的定义与主题类型相似,不同的是,服务类型包括两部分:
一个消息用于请求,另一个消息用于响应。
- 请求
- 响应
例如,一个典型的主题类型color:
uint8 r
uint8 g
uint8 b
定义了r g b三色。
而一个典型的服务类型setpen:
uint8 r
uint8 g
uint8 b
uint8 width
uint8 off
---
此处注意并没有消息用于响应,但是又---
又例如spawn:
float32 x
float32 y
float32 theta
string name # Optional. A unique name will be created and returned if this is empty
---
string name
要找出服务的类型,请使用以下命令:
ros2 service type <service_name>
比如服务/clear
ros2 service type /clear
显示
std_srvs/srv/Empty
空类型表示服务调用在发出请求时不发送任何数据,而在接收响应时不接收任何数据。
看看ros2 service type /spawn
turtlesim/srv/Spawn
3.3 列表
这个命令类似topic,用法也类似:
ros2 service list -h
- -h 帮助
- -t 显示类型
- -c 输出数量

ros2 service list -t
显示如下:

3.4 类型
如果需要查找给定类型,使用这些类型的服务使用如下命令:
ros2 service find <type_name>
比如查找空Empty类型
ros2 service find std_srvs/srv/Empty
会返回:

3.5 接口
可以从命令行调用服务,但是首先需要了解输入参数的结构。
ros2 interface show <type_name>.srv
例如,服务/clear的类型Empty:
ros2 interface show std_srvs/srv/Empty.srv
显示
---
---将请求结构(上方)与响应结构(下方)分开。 但是,正如先前所了解的,Empty类型不会发送或接收任何数据。 因此,自然地,它的结构是空白的。
再如/spawn

---行上方的信息可知调用/spawn所需的参数。 x,y和theta确定了小乌龟的位置和角度,命名是可选的。
在这种情况下,不需要了解该行下方的信息,但可以帮助了解通过调用获得的响应的数据类型。
3.6 调用
现在已经知道什么是服务类型,如何找到服务类型以及如何找到该类型的参数结构,可以使用以下命令调用服务:
ros2 service call <service_name> <service_type> <arguments>
更多内容:

<arguments>部分是可选的。 例如,Empty类型的服务没有任何参数:
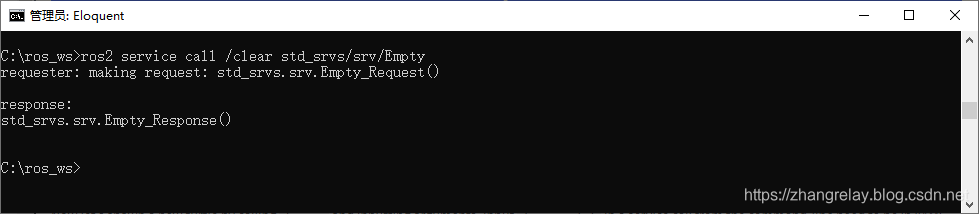
如下命令将清除turtlesim窗口中小乌龟绘制的所有线条。
之前:

命令:
ros2 service call /clear std_srvs/srv/Empty
之后:

现在,通过调用/spawn并输入参数来生成一只新的乌龟。 在命令行中进行服务调用输入的<arguments>必须采用YAML语法。
输入命令:
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
回应如下:

虽然没有指定名称,但是系统给定turtle2。

节点可以使用ROS 2中的服务进行通信。服务仅将信息传递给节点(如果该节点明确要求该信息),并且每个请求仅将信息传递一次(而不是连续流)。 通常不希望使用服务进行连续调用; 否则主题甚至行动将更适合。
在本教程中,使用了命令行工具对服务进行识别,详细说明和调用。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/103493612

- 点赞
- 收藏
- 关注作者
评论(0)