ROS2之rover案例

【摘要】 欧洲航天局ESA的ROS2案例,源码在github上。
使用:ros2 launch rover_simulation simulation_control.launch.py
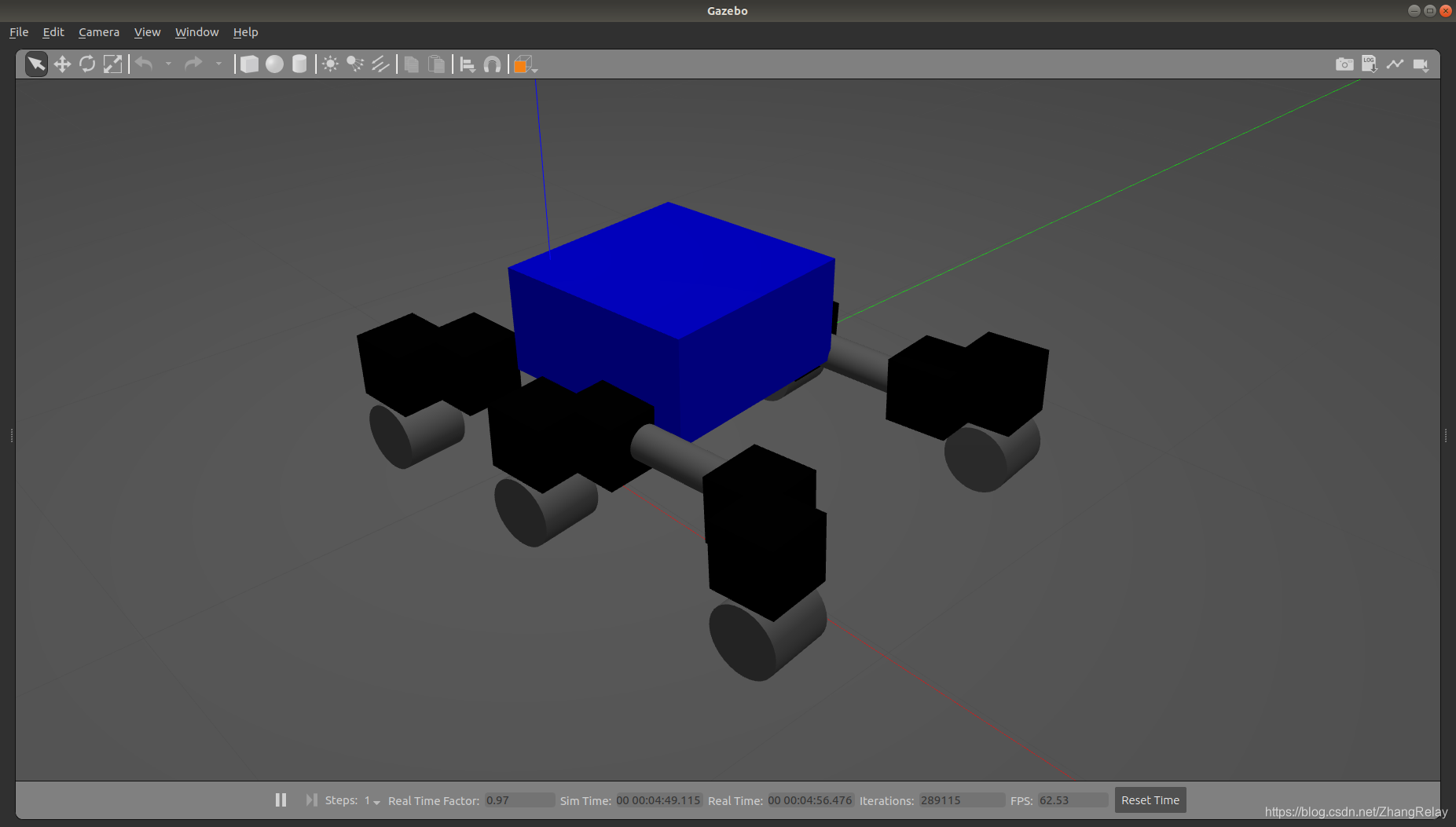
gazebo视角1:
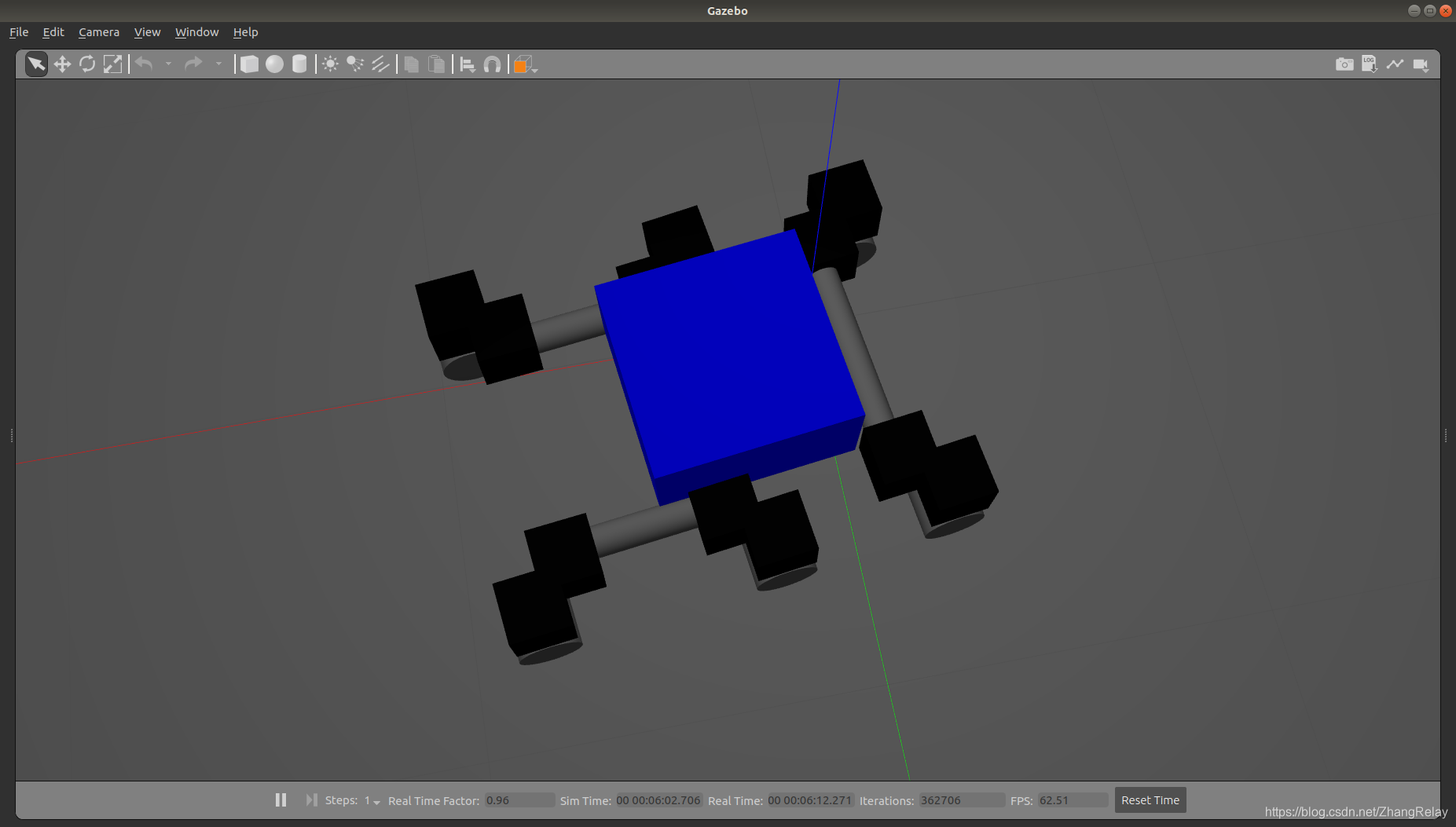
gazebo视角2:
借助此案例可以复习之前学习和实践过的各类指令和算法,如:
ros2 topicrqtrviz2
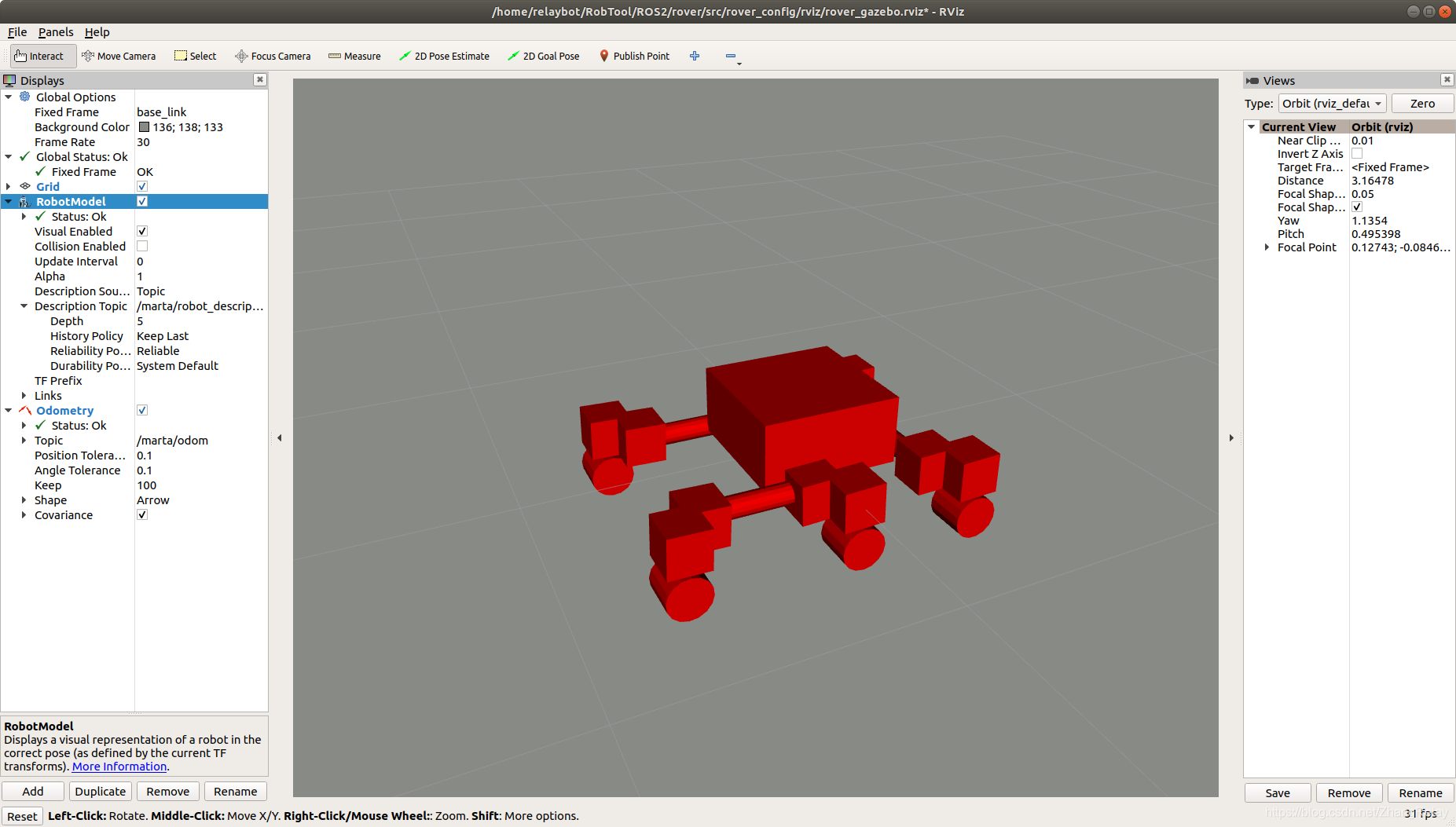
rviz2:
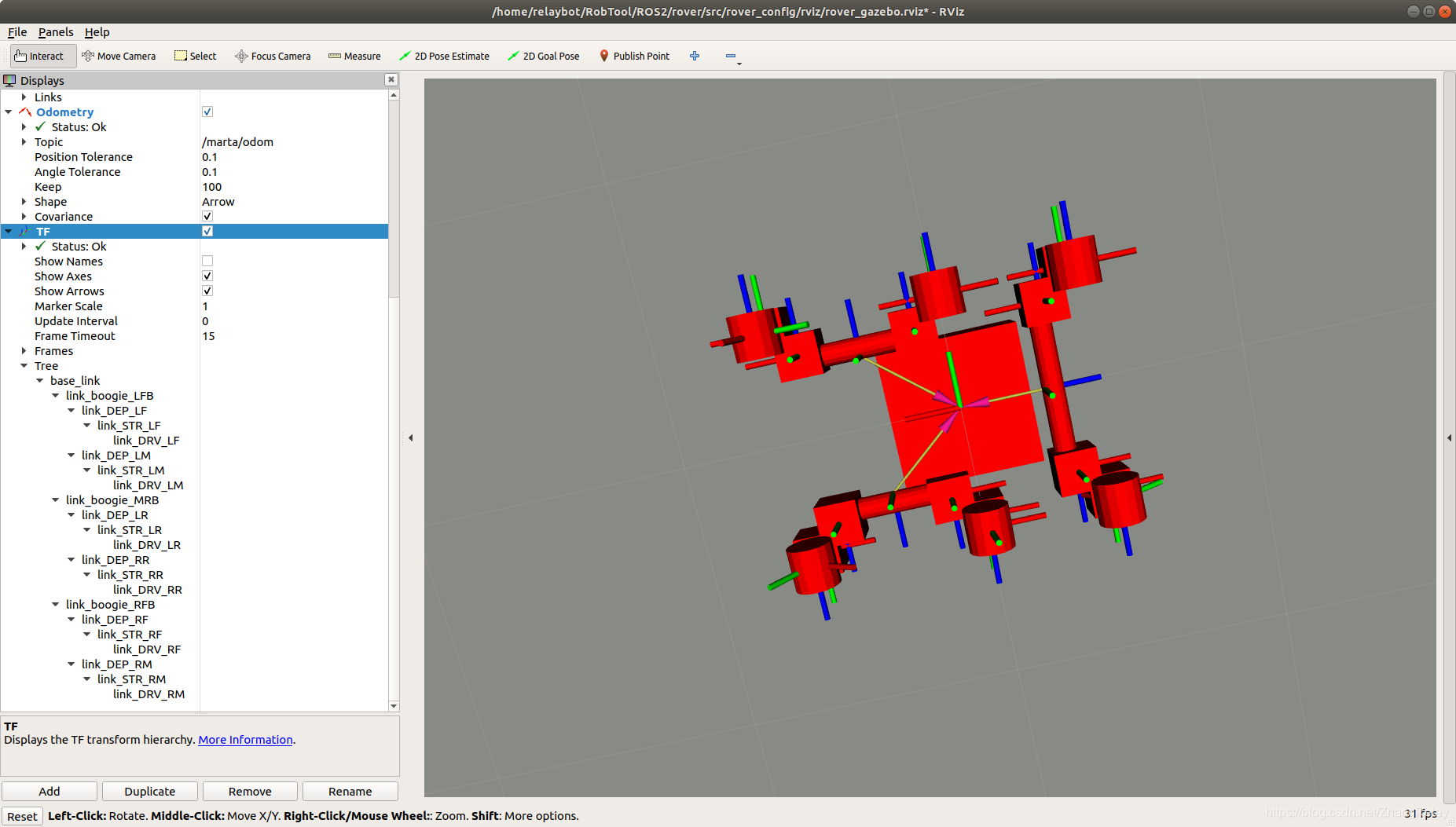
tf:
&n...
欧洲航天局ESA的ROS2案例,源码在github上。
使用:ros2 launch rover_simulation simulation_control.launch.py
gazebo视角1:
gazebo视角2:
借助此案例可以复习之前学习和实践过的各类指令和算法,如:
- ros2 topic
- rqt
- rviz2
rviz2:
tf:
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/105621091

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)