使用机器人操作系统ROS 2和仿真软件Gazebo 9多机器人实践(五)

【摘要】 在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore):
多机器人-图书馆环境
smallhouse案例可以测试单机器人SLAM,扫地机器人算法,室内导航,多点巡逻等。
bookstore案例可以尝试更复杂的多机...
在第三个和第四个案例中,我们依然只使用了一个机器人,毕竟室内环境比较小,为了增加趣味性和竞技效果,通常环境中可以有多个机器人要么竞争或协作完成任务,本实践选用如下场景(aws_bookstore):

smallhouse案例可以测试单机器人SLAM,扫地机器人算法,室内导航,多点巡逻等。
bookstore案例可以尝试更复杂的多机协作,例如共同构建环境地图,场地内协作等,更具挑战性。
需要在学习1-4课之基础上再实践本环节,如何在环境中放入多机器人呢,当然可以是同一类机器人也可以不同种机器人,都是ok的啦,比如四旋翼和小车组合等。
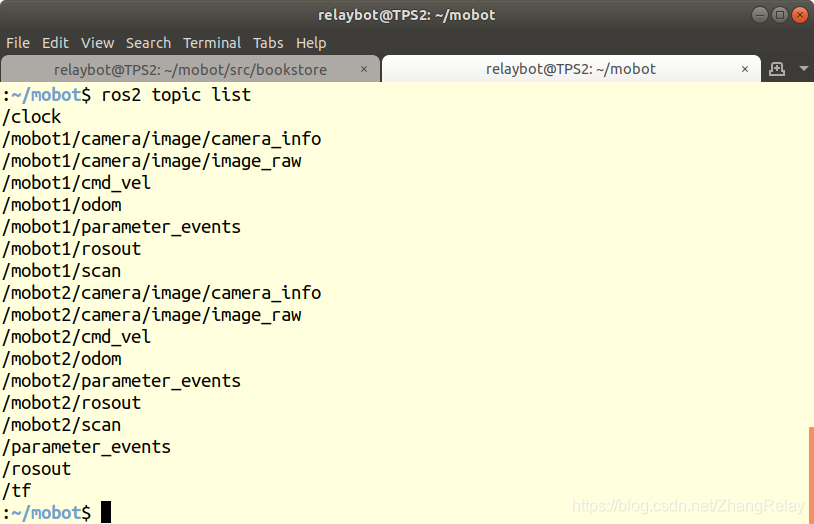
此时应该熟练掌握ROS2各类指令和基本编程了吧~…~
^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^
动手实践起来,完成这个案例吧!
部分效果截图如下:

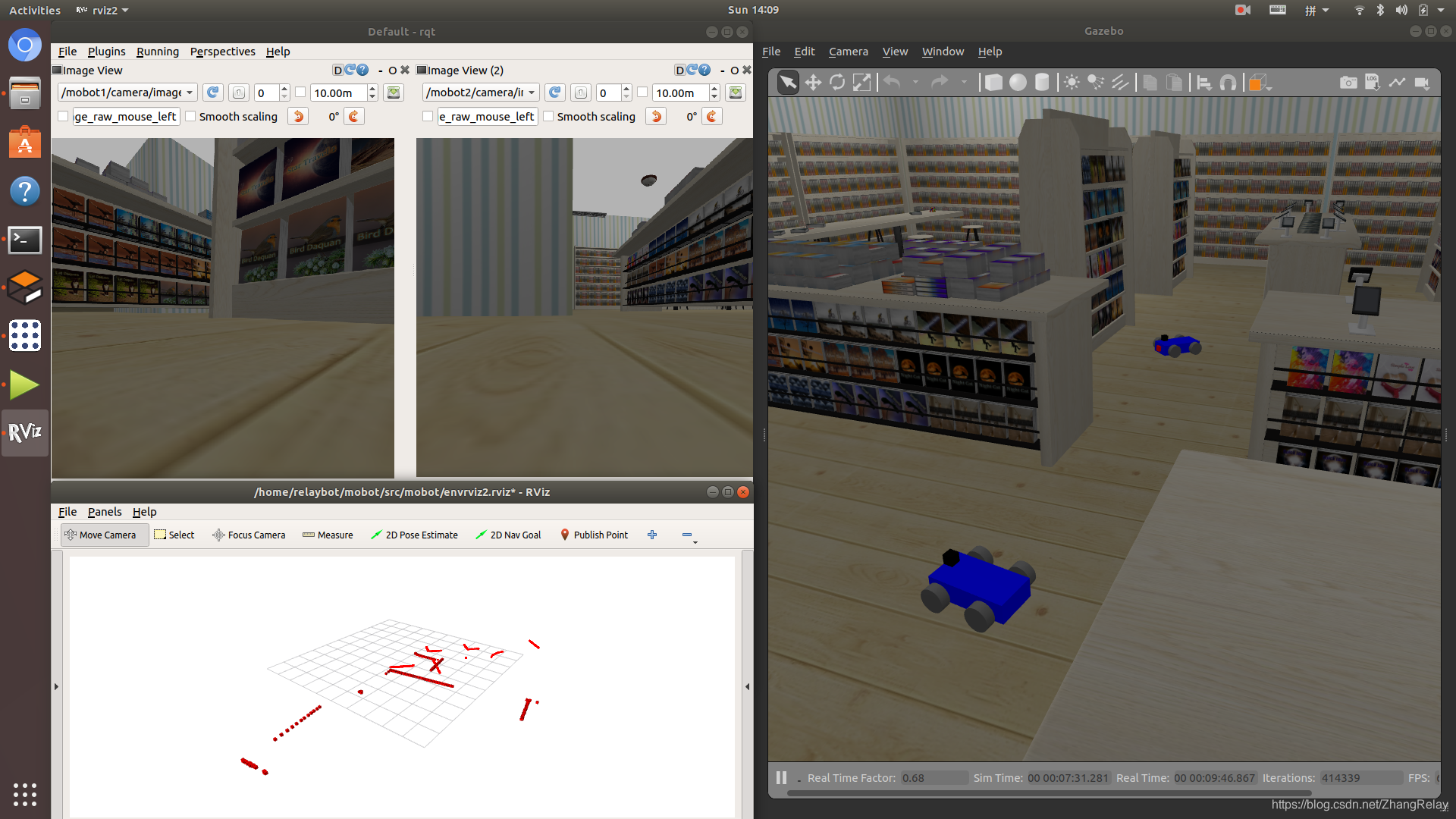
录屏如下所示:
ROS 2和Gazebo 9中mobot多机器人图书馆环境仿真案例
完成此节,就基本掌握了在gazebo中使用多机器人的方法,也能掌握使用ros2命令多机器人等内容。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/105768294

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)