ROS2机器人应用简明教程01文档

【摘要】 学习ROS2机器人操作系统第一步要做什么呢?下载最新的官方文档到本地:
在github搜索ros2_documentation,使用git或者浏览器下载均可。
使用说明:
下载的文档需要编译才可使用,具体步骤如下:
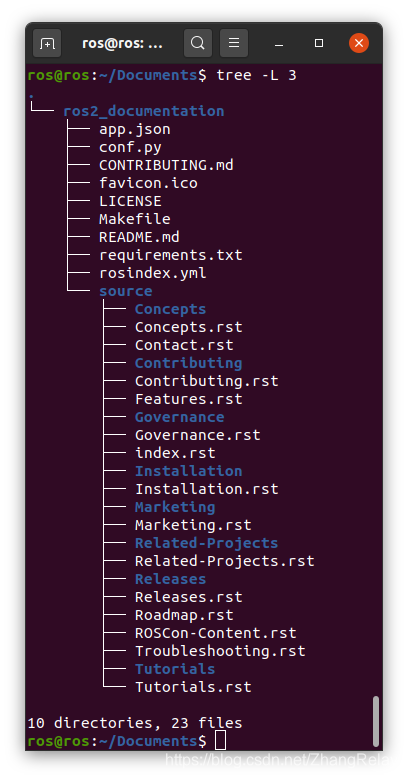
在编译前,文档结构和内容如下:
如果需要使用tree:
安装:sudo apt install tree说明:tree --help
...
学习ROS2机器人操作系统第一步要做什么呢?下载最新的官方文档到本地:
- 在github搜索ros2_documentation,使用git或者浏览器下载均可。
使用说明:
下载的文档需要编译才可使用,具体步骤如下:
在编译前,文档结构和内容如下:
如果需要使用tree:
- 安装:sudo apt install tree
- 说明:tree --help
由上可知,ROS2文档源主要在source文件夹下。
本地编译生成文档:
第一步,预备:
- sudo apt install python3-pip
- pip3 install sphinx sphinx-tabs
第二步,编译:
- make html
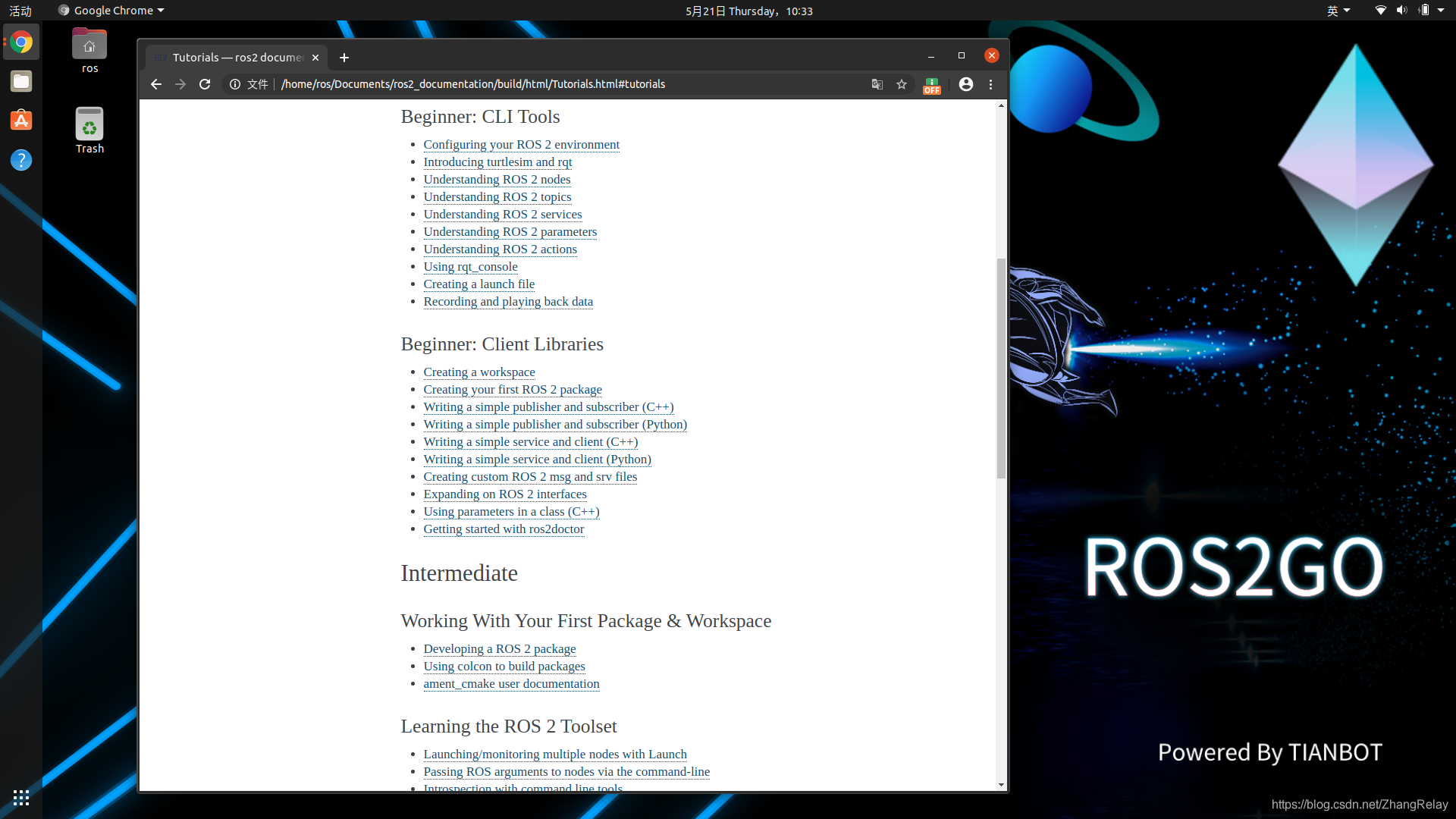
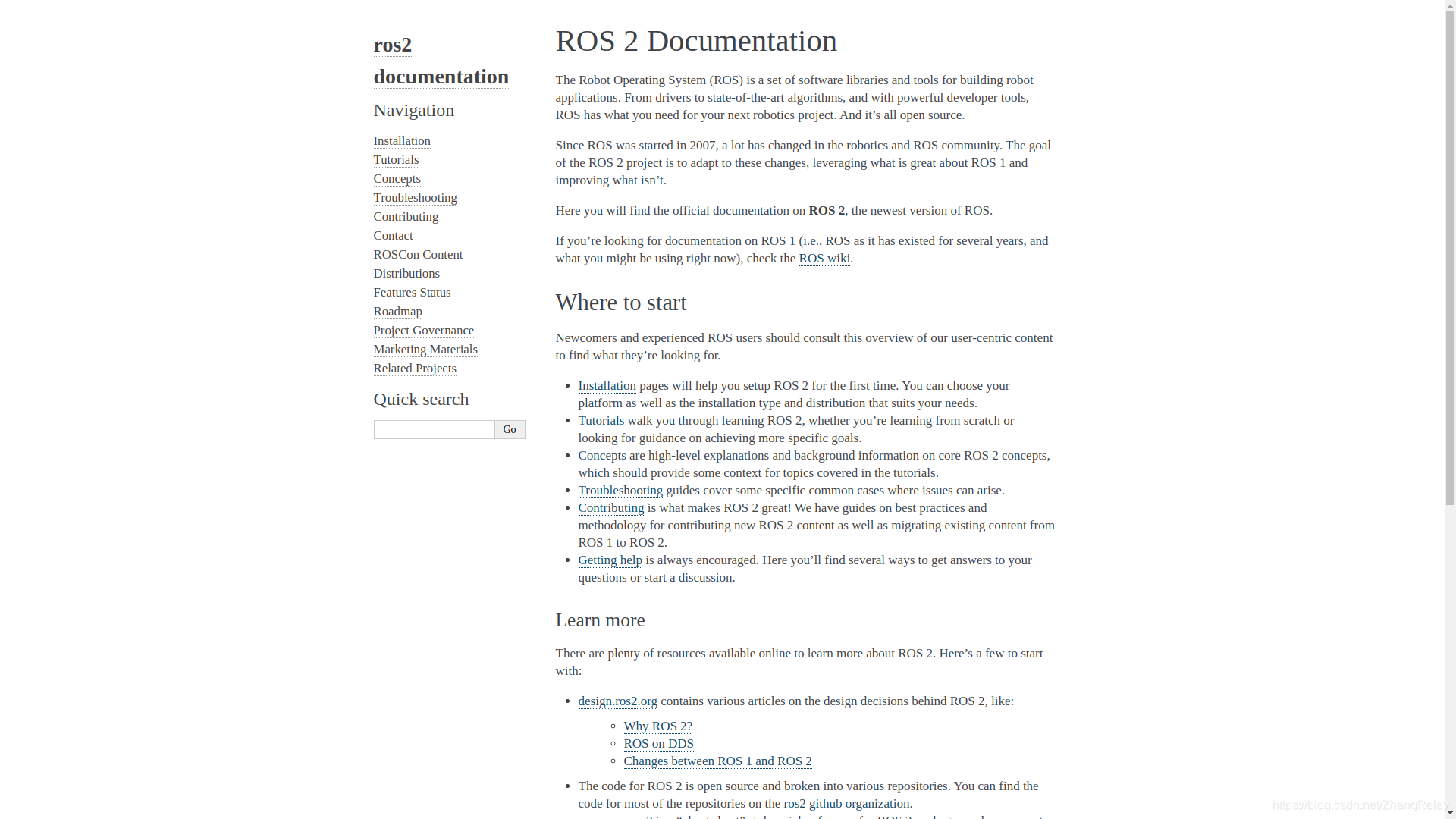
最终网页文档在build/html文件夹下,主页是index.html。
- file:///home/ros/Documents/ros2_documentation/build/html/index.html
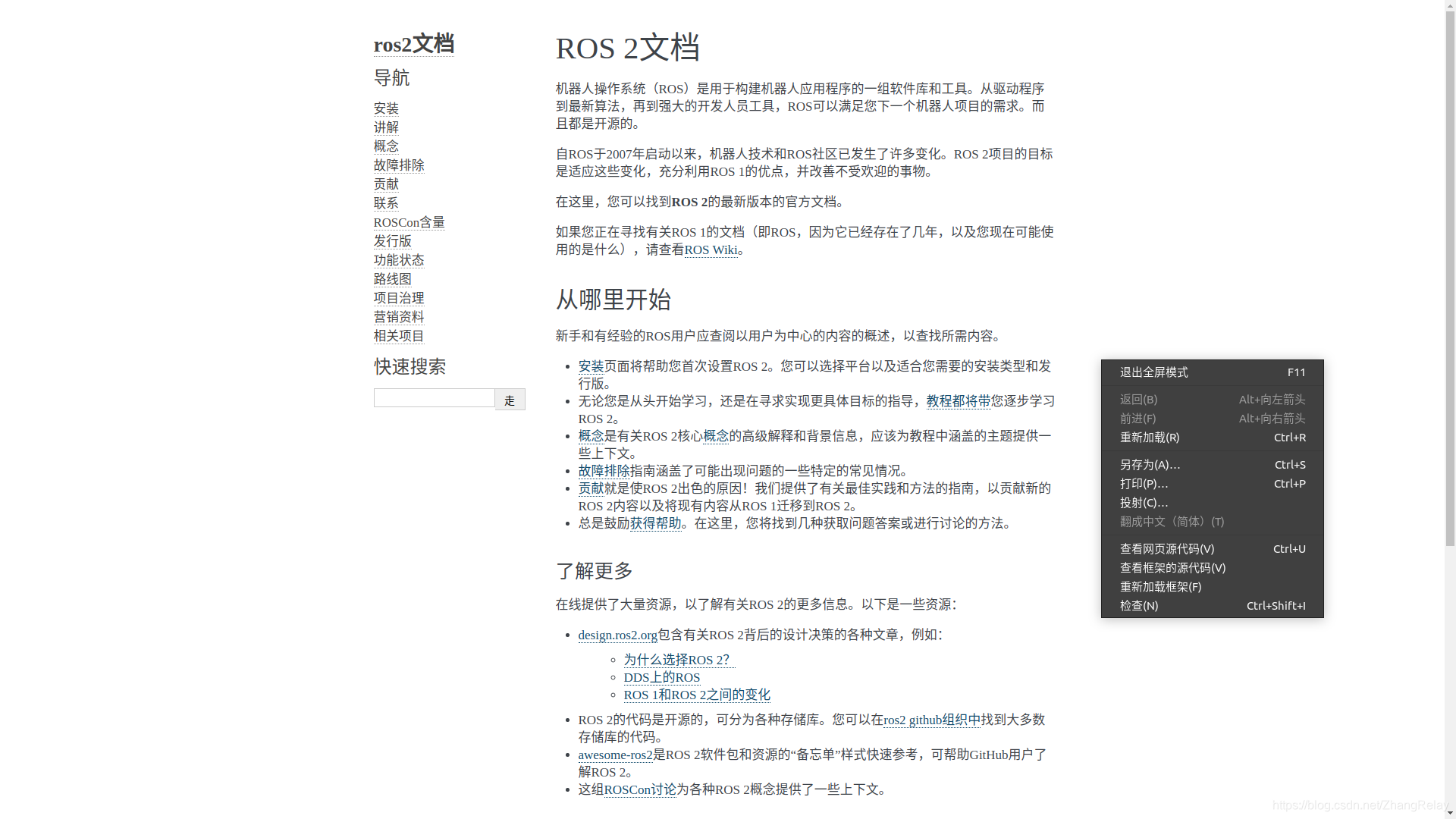
如果,刚开始阅读英文文档肯定有些不习惯,那么使用谷歌浏览器等右键翻译成中文即可。
使用和阅读官方文档是学习任何一门编程语言或者工具软件的第一步,也是最重要的一步。
实践录屏如下:
ROS2机器人应用简明教程01文档
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/106249852

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)