ROS2机器人笔记20-09-12

支持ROS1和ROS2的机器人还在持续增加,开放开源。
Boston Dynamics’ Spot
Clearpath Robotics宣布了适用于Boston Dynamics Spot机器人的ROS驱动程序。我们还与Boston Dynamics合作,为机器人研究与开发社区提供了支持ROS的Spot机器人。

自从发布 TeleOp for ROS于6月发布,这种在世界任何地方控制移动机器人的能力迅速成为用户最常用的功能。听取了各方反馈后,并在各种情况下进行了压力测试,并日夜工作以使其更好。今天,它的第一个重大更新Pilot 1.5发布。
- 在恶劣的网络环境下稳定16倍,
- 将帧速率提高48%,
- 将延迟降低35%,并使一致性提高10倍
一年免费试用~
教程参考:https://docs.freedomrobotics.ai/docs/pilot-control-a-robot-arm
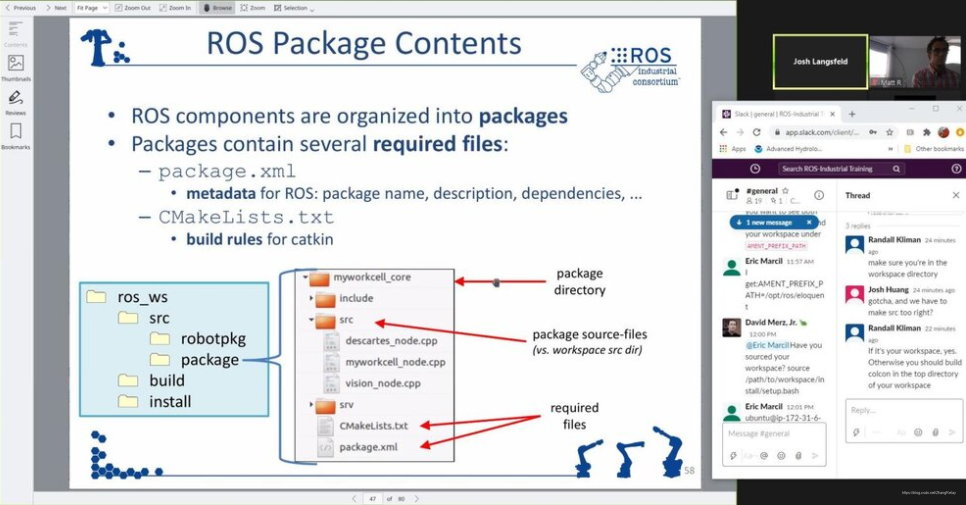
首次针对ROS2的在线ROS工业培训
SwRI最近在讲师Josh Langsfeld,David Merz和Randall Kliman的带领下为ROS-Industrial Americas联盟成员举办了培训课程。由于它是在COVID19大流行期间举行的,因此传统的面对面格式被一种全新的虚拟培训方法所取代,该方法使用视频会议和在云中运行的虚拟机而不是学生自己的笔记本电脑来进行。总体时间表与之前的培训课程相似,为期两天的重点是旨在教授ROS和ROS工业基础知识的练习,然后是更为自由的实验日,学生可以进行更长的练习。该课程在全天的Zoom会议中举行,这使讲师和学生在演示和锻炼期间都可以轻松进行互动。
为了向学生提供Ubuntu环境,我们选择了一种新方法,其中我们使用Amazon的Elastic Compute Cloud(EC2)服务设置虚拟机,并要求学生使用远程桌面协议登录。我们很高兴与Amazon合作来建立这种安排,他们通过准备预装ROS Melodic的Ubuntu 18.04基本映像为他们提供了帮助。这样,我们就可以启动一整套虚拟机实例,每个学生一个,准备好进行培训。这些实例可通过公共互联网访问,因此所有学生都只能使用IP地址和提供的密钥文件直接登录。事实证明,这种方法非常强大,没有人在访问云实例时遇到任何问题。使用EC2虚拟机还可以实现轻松的师生互动,因为讲师还可以登录到相同的实例,并准确地查看学生所看到的内容。我们将此功能与Zoom分组讨论室一起使用时效果非常好,可以与学生进行一对一的故障排除,既可以指导学生下一步操作,甚至可以控制学生的机器,以帮助解决更复杂的问题。总体而言,虚拟培训的体验非常顺利,即使面对面的培训能够继续进行,我们也有可能继续将其作为一种选择。
而且,如果第一次尝试虚拟培训还不够,那么这次培训也标志着ROS2持续采用的里程碑,因为第一天讲授的基本材料和练习已更新为使用ROS2,而无需假设已具备ROS1的知识。第一天介绍了ROS包,消息,主题,服务和参数的基本概念,所有这些功能都完全可用,并且可以在ROS2中轻松演示。由于ROS-Industrial处于过渡阶段,因此ROS2中尚未提供完整的培训。相反,第二天讲授ROS工业特定的基本概念,包括URDF,TF和MoveIt的运动计划,这些都是在ROS1中完成的。我们希望这种过渡将继续下去,并且很快所有这些材料也将在ROS2中提供,尤其是现在MoveIt2已经推出并可以使用了。在接下来的几个月中,请重新访问培训网站,以随时关注最新信息!我们将期待更多的培训课程,并扩展我们可以使用ROS2和虚拟培训格式进行的工作。
© 2021
Robot Operating System (ROS)
The Complete Reference (Volume 5)


本书的目的是为读者提供有关机器人操作系统(ROS)的全面介绍,该操作系统目前被认为是机器人应用程序的主要开发框架,最新趋势和贡献系统。
内容分为六个部分。第一部分首次展示了新兴的ROS 2.0框架,而第二部分则重点介绍了多机器人系统,即SLAM和Swarm协调。第三部分提供了关于自动驾驶系统的两章,即自动驾驶汽车和无人驾驶航空系统。反过来,第四部分介绍了ROS仿真框架的贡献。在第五部分中,有两章探讨了机器人操纵器和有腿机器人。最后,第六部分介绍了单目SLAM中的新兴主题以及有关ROS的容错系统的章节。鉴于其范围,该书将为ROS用户和开发人员提供宝贵的伴侣,帮助他们加深对ROS功能和特性的了解。
前四卷也是干货满满~
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/108555471

- 点赞
- 收藏
- 关注作者
评论(0)