tianbot_mini机器人上手ROS/SLAM/Navigation究竟有多简单???

>>>tianbot_webots_cartographer<<<学生案例分享
参数和算法不合适:
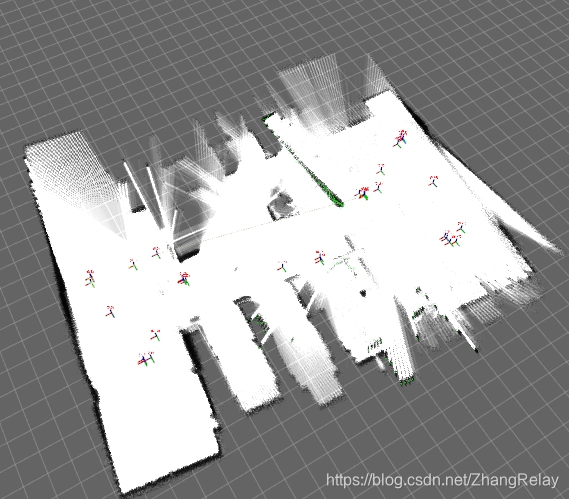
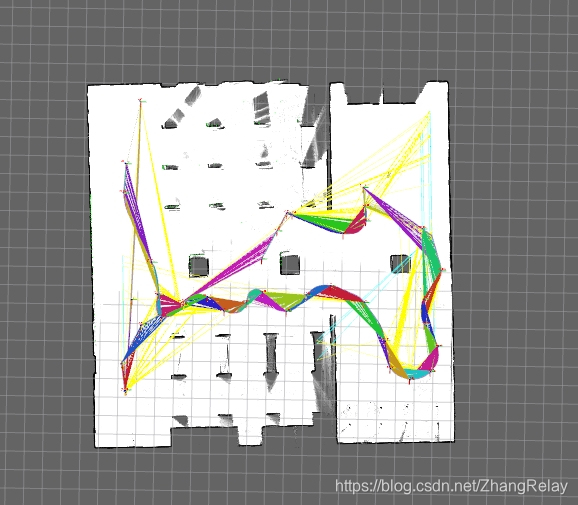
修正和优化后:
>>>tianbot_mini办公室<<<
tianbot_mini
>>>tianbot_mini小教室<<<

>>>tianbot_mini大教室<<<
要想获得较好的SLAM或导航效果,默认参数肯定要优化,如果要想更进一步,算法走起,OpenSLAM或者更多开源或自己开发的算法测试起来。
之前,上过机器人或者单片机或者计算机或者控制的相关课程,急需一款适用于多课程的融合性机器人。
自己搭建机器人如下:
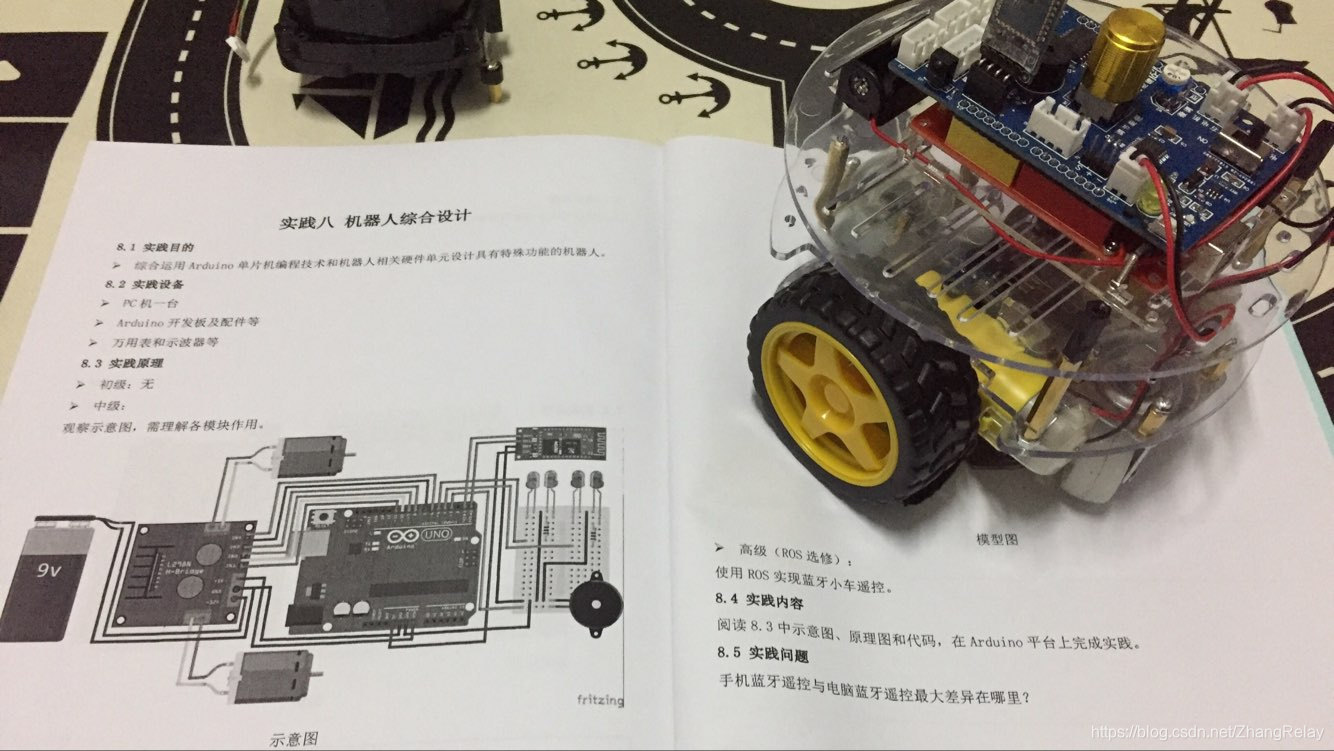
给它化妆美化一下:

但是还是不好用,稳定性一般,然后每次搭建也费时间,唯一的好处就是学生可以看见机器人搭建全过程。

现在基本用这款小机器人。官网有介绍,现在简要介绍一下过程吧:
一,配网,主机和mini都链接相同的局域网中,并且需要将雷达的无线也插入主机USB口。
二,调试,打开机器人IP,本机如:192.168.2.100,使用方向键看下机器人是否一切正常运动。
三,导航,使用三行命令直接开始ROS和SLAM的愉悦旅程。
下面详细介绍一下。

.bashrc,相关内容如下:
-
# ROS 1.0 melodic or ROS 2.0 Dashing
-
echo Hello, ROS 1.0 or ROS 2.0? 1=Melodic 2=Dashing
-
read ROS
-
if (($ROS==1));then
-
source /opt/ros/melodic/setup.bash
-
#export ROS_PACKAGE_PATH=/home/relaybot/RobTool/ROS1/Wiki/src:/home/relaybot/RobTool/Cozmo/ros/src:$ROS_PACKAGE_PATH
-
#source /home/relaybot/RobTool/ROS1/Wiki/devel/setup.bash
-
export ROS_MASTER_URI=http://192.168.2.101:11311
-
export ROS_IP=192.168.2.101
-
echo "Melodic"
-
elif (($ROS==2));then
-
source /opt/ros/dashing/setup.bash
-
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/dashing/share/turtlebot3_gazebo/models
-
echo "Dashing"
-
else
-
echo "Non-ROS"
-
fi
启动,roscore:

启动机器人, roslaunch tianbot_mini bringup.launch:

warn可暂时忽略,后续会讲解。
启动lidar,roslaunch tianbot_mini lidar.launch

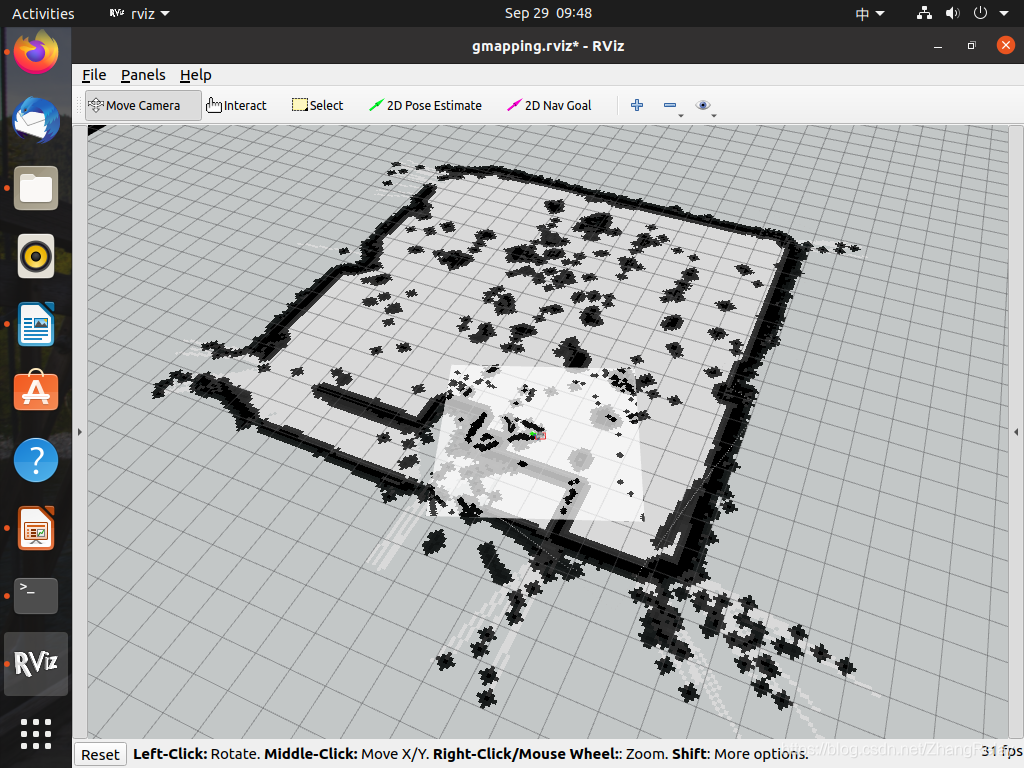
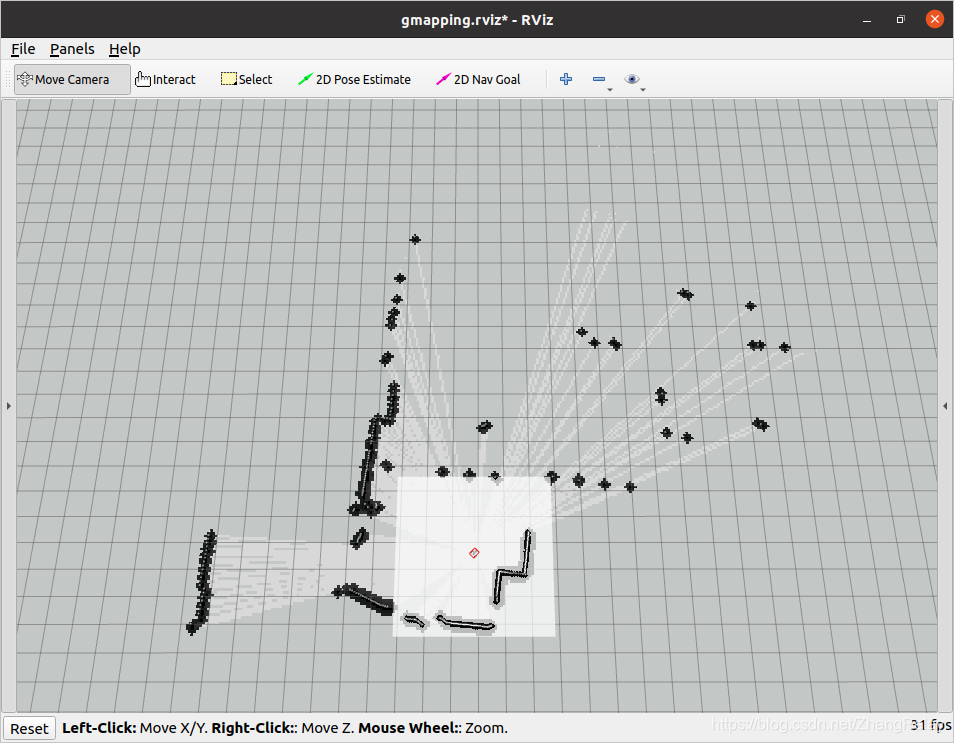
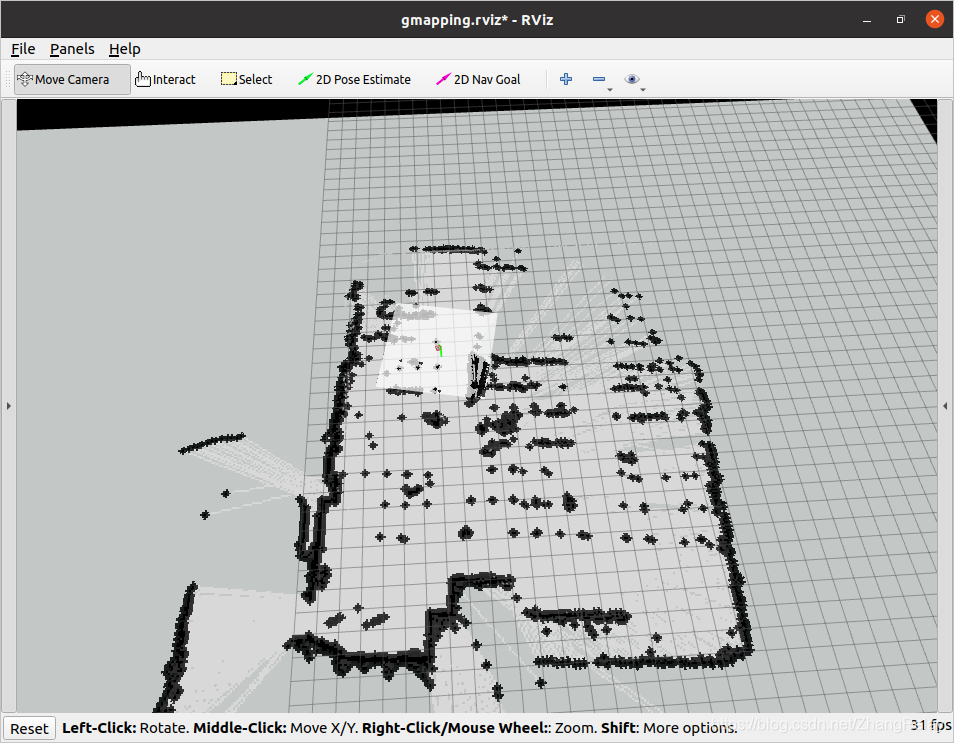
启动slam,roslaunch tianbot_mini slam.launch

可以愉快的玩耍起来了。
先看下rqt提供的功能:
rqt_graph:
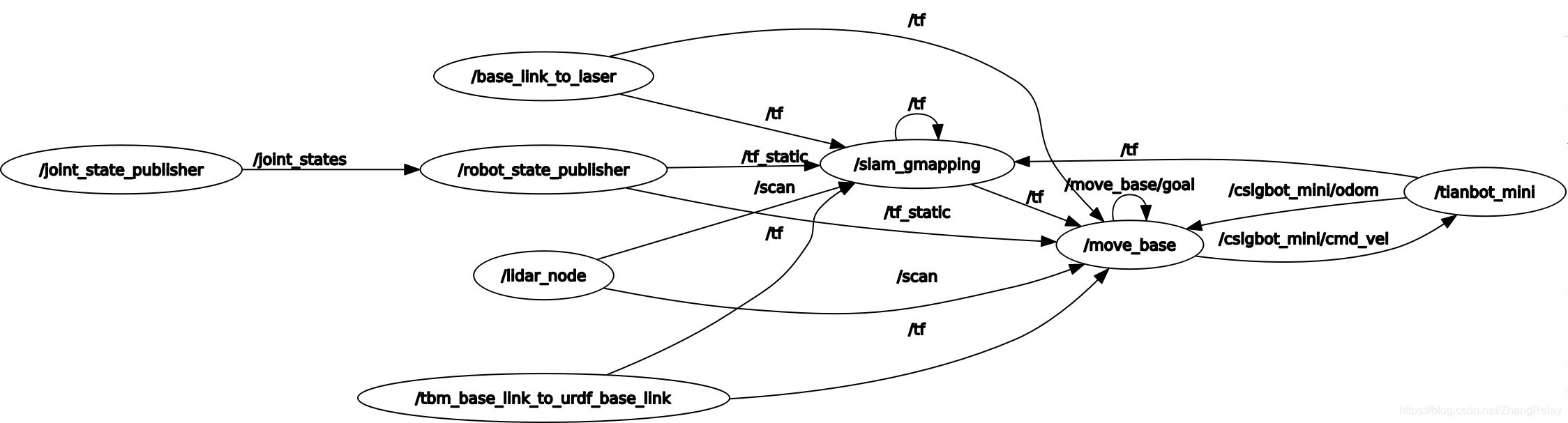
all:

tf:

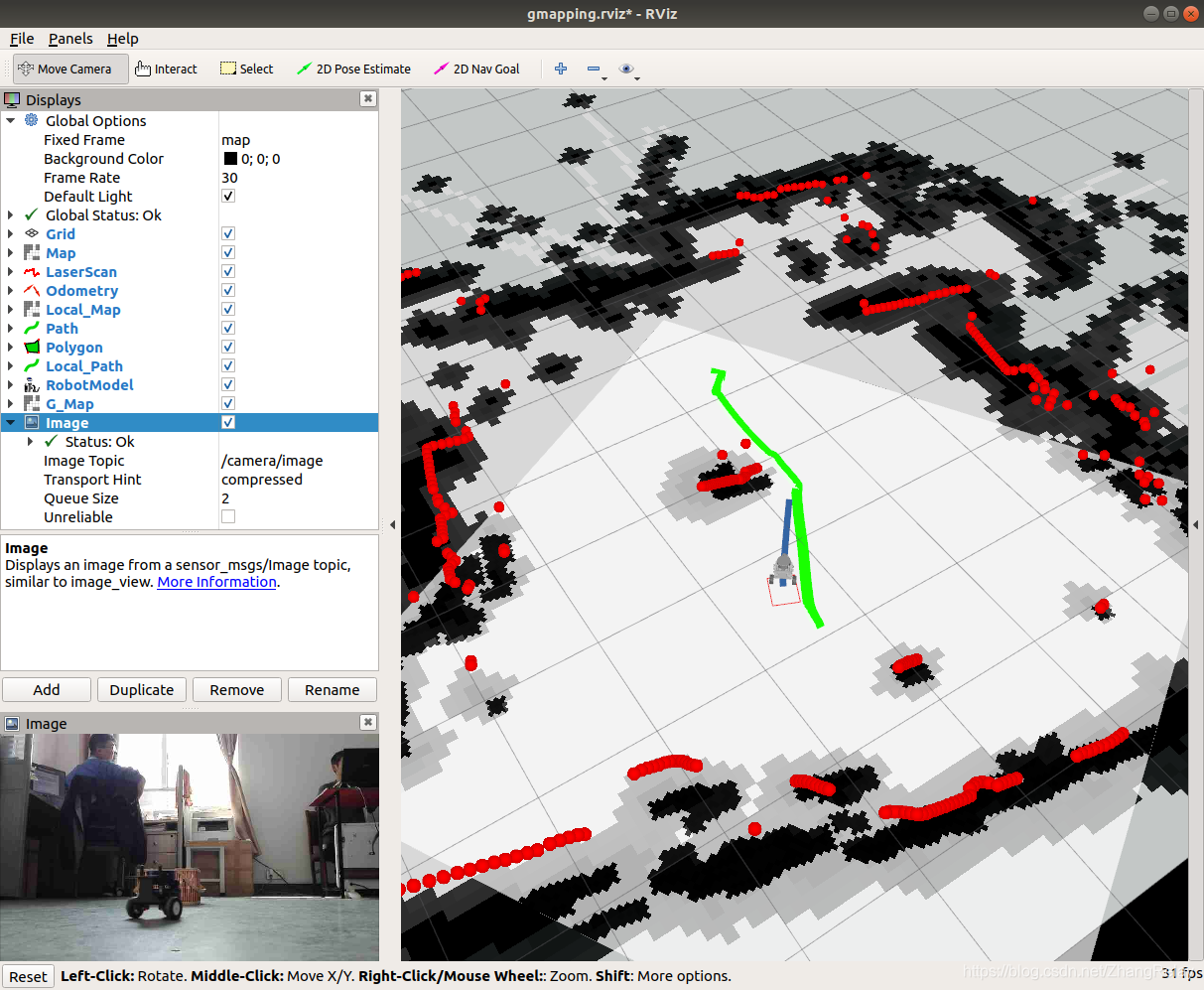
为了方便观看机器人在环境中的导航规划,使用摄像头监控机器人:
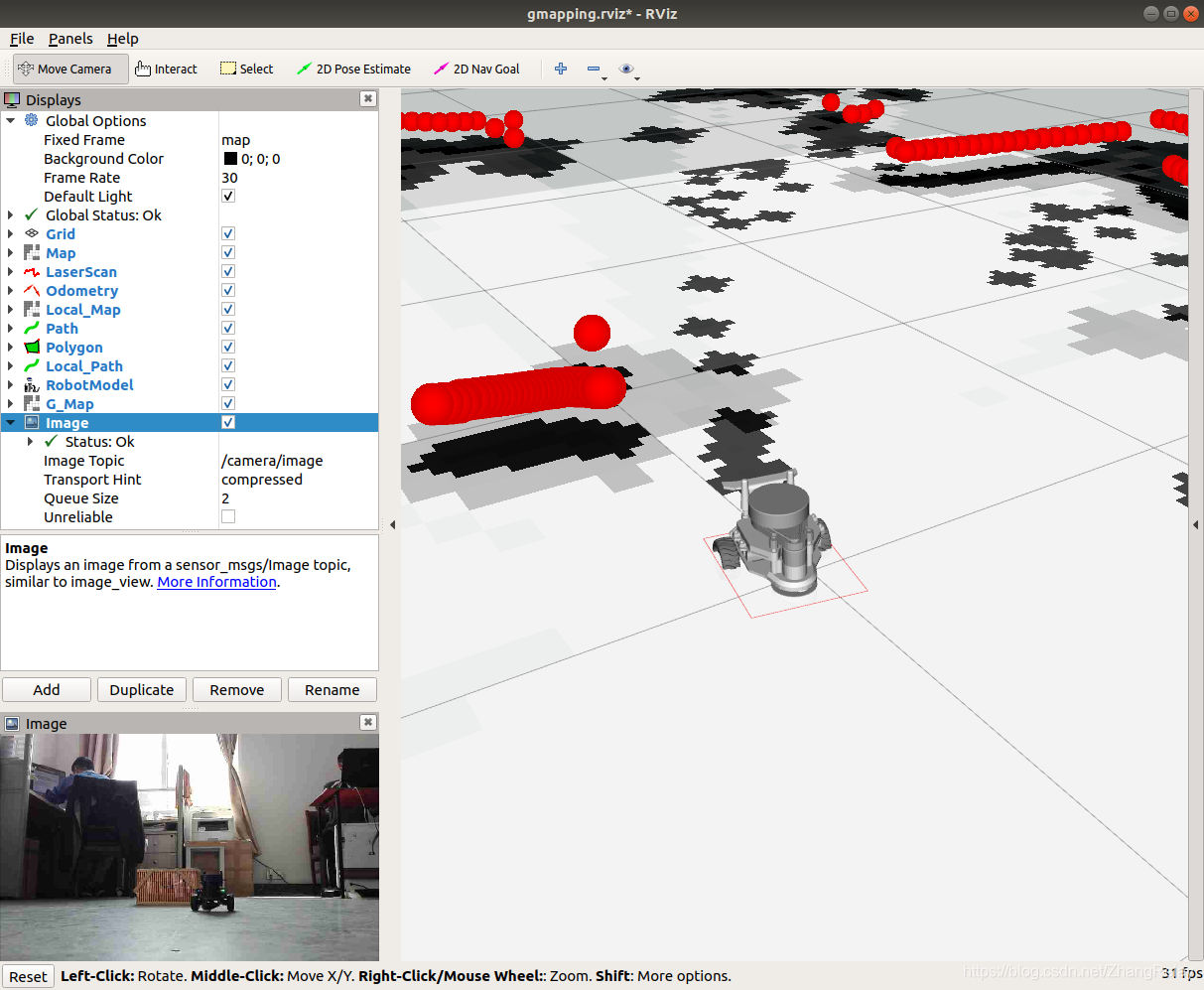
开启导航!
更多内容稍后介绍……
一个小时快速了解机器人操作系统,同步定位和地图构建,导航。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
但这一切其实来之不易,前后历时至少5年,多少原型,多少付出,只有做过的才会懂。

文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/108631609

- 点赞
- 收藏
- 关注作者
评论(0)