ROS2机器人笔记20-09-24

看最新动态,ROS1基本稳定更新维护,ROS2研发进度超快。
现有的ROS1功能包几乎涵盖了所有主流机器人和所有主流机器人学算法,同时这些大部分开源。
未来主流技术主要有如下类别:
个人学习围绕物联网+机器人+人工智能为主线展开,课程教学也是如此。

基于ROS2的自平衡激光机器人,很有趣,能够融合机器人和现代控制理论等知识点。
开源的狗狗库,仿真舞蹈机器人大赛指日可待啊……
越来越多的开源库转移到ROS2和Ignition,图形化应用web化已经不算趋势了,应该是主流了。
作者:Levi Armstrong 在2020年9月23日
采用Ignition Robotics软件作为Tesseract运动计划框架的可视化工具集。
如果熟悉ROS中的当前工具,可能会问,为什么选择在RViz,RobotWeb Tools等工具上使用Ignition Robotics软件。我认为,Ignition Robotics软件更着重于用户体验,而其他针对特定平台更加注重开发人员。Ignition GUI利用Qt Quick,它比传统的Qt小部件具有多个优势。这些优势使其不仅可以在台式机上使用,而且可以在平板电脑和智能手机上使用,以及多种用于Web部署的方法。与使用工业人机界面(HMI)的方式类似,提供了充分利用此工具的可能性。此外,Qt Quick提供了一种更干净的解决方案,用于将UI开发与业务逻辑分开,从而可以更快地进行开发和集成。
Ignition机器人软件的另一方面是渲染功能,它不仅提供Ogre,还提供Ogre2和OptiX。而且由于其插件体系结构,将来很有可能会看到更多对其他渲染库的支持。最后,另一个优势是可以直接使用点火物理学提供的物理学,以便将来模拟各种工业过程,例如打磨,研磨和涂漆。
该练习的另一部分是确定如何部署用户工具。由于我们正在谈论的是部署应用程序,而不是主要是自包含的库,因此使用部署方法的关键是使用户可以轻松访问这些工具,并且进行了频繁的改进并支持在使用前进行早期测试以进行测试。可用的新功能。为此,我们选择利用Canonical提供的Snapcraft和Snap Store在Linux上部署这些基于用户的工具,并且我们目前正在研究使用MSIx在Windows上进行部署。
在继续提供有关Tesseract Ignition的详细信息之前,我想认识两个在整个开发和决策过程中发挥重要作用的关键人物。我要感谢Open Robotics的Louise Poubel对Ignition Robotics软件包的支持,以及Canonical的Kyle Fazzari对将此工具构建和部署到Snap Store的支持。感谢在此工作上的时间和指导,我期待进一步的合作。
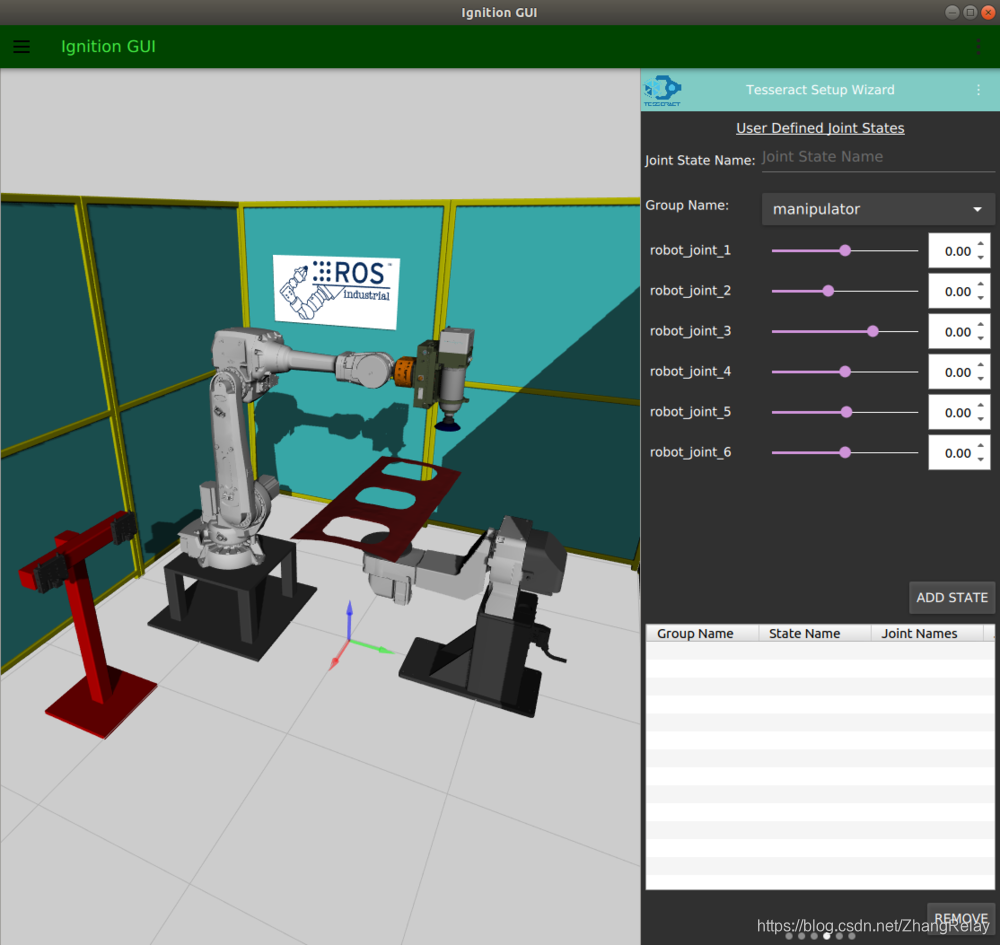
Tesseract Ignition概述:该软件包提供了两个应用程序,第一个是Tesseract设置向导,第二个是下面概述的Tesseract Visualization,可以通过单击下面的Snap Store按钮下载到Snap Store中。请观看我们的视频,以逐步了解这些工具以及如何开始使用它们。
- Tesseract安装向导
- 加载URDF和SRDF
- 定义运动学组
- 定义允许的碰撞矩阵
- 定义组状态
- 定义组工具中心点
- 定义小组运动运动学参数
- 保存SRDF
- Tesseract可视化
- 轨迹模拟
- 工具路径可视化
- 标记可视化
节能机器人文献
作者:iivanoo
最近对机器人软件能源效率的现有研究进行了回顾。
- 有兴趣进一步为机器人软件的能效领域做出贡献的研究人员
- 有兴趣通过采用我们所审查的一些方法来提高机器人的能源效率的从业者
将在与自动化软件工程会议(ASE)共同举办的SUSTAIN-SE-2020研讨会上进行介绍。
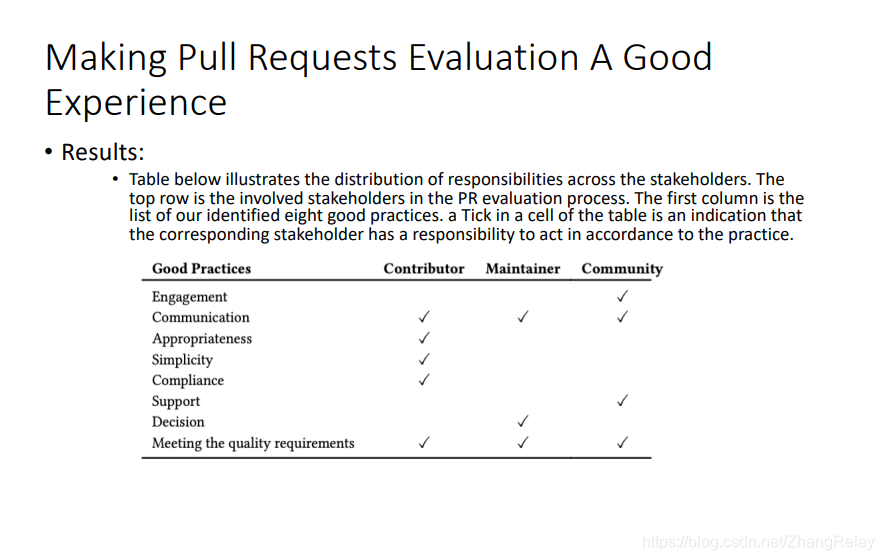
确定什么可以构成良好的PR评估流程。
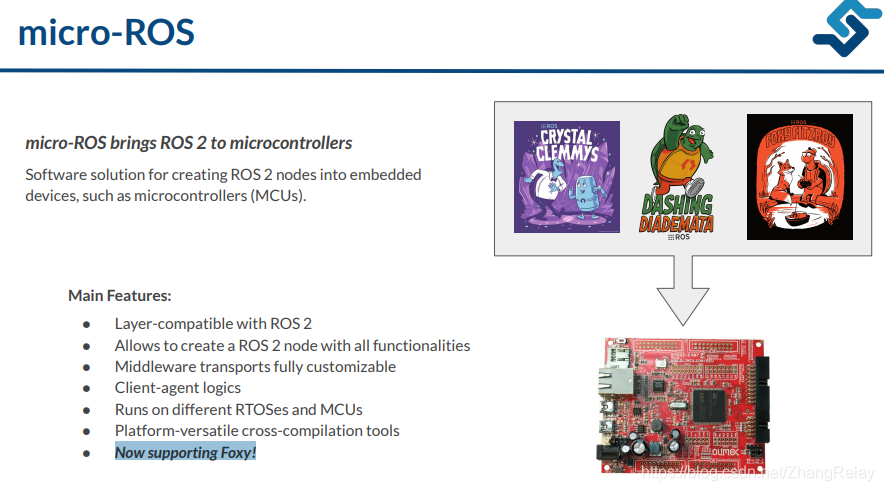
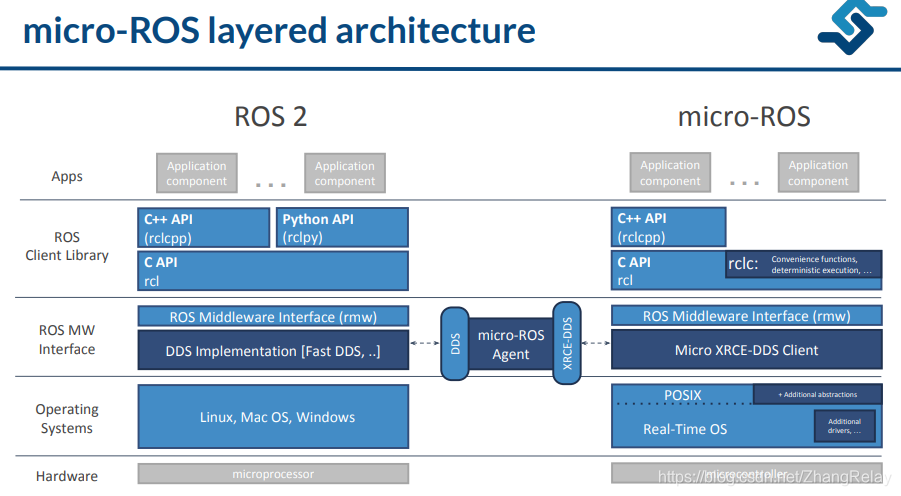
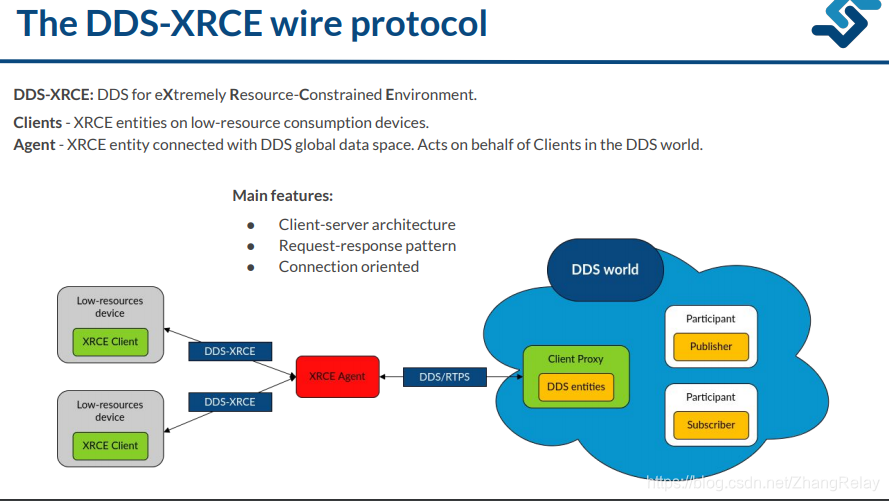
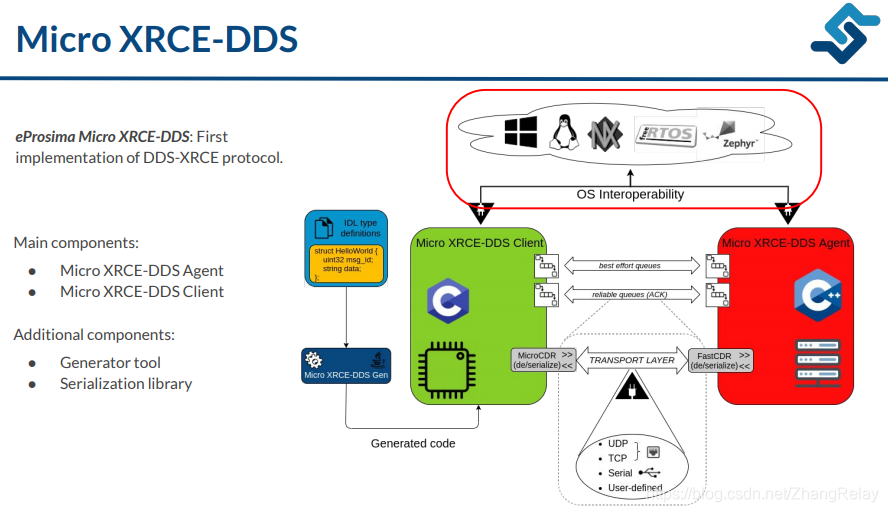
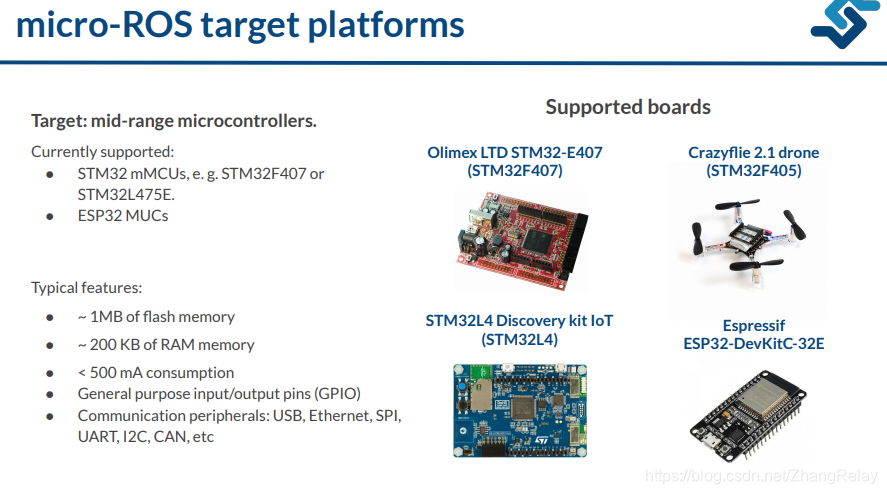
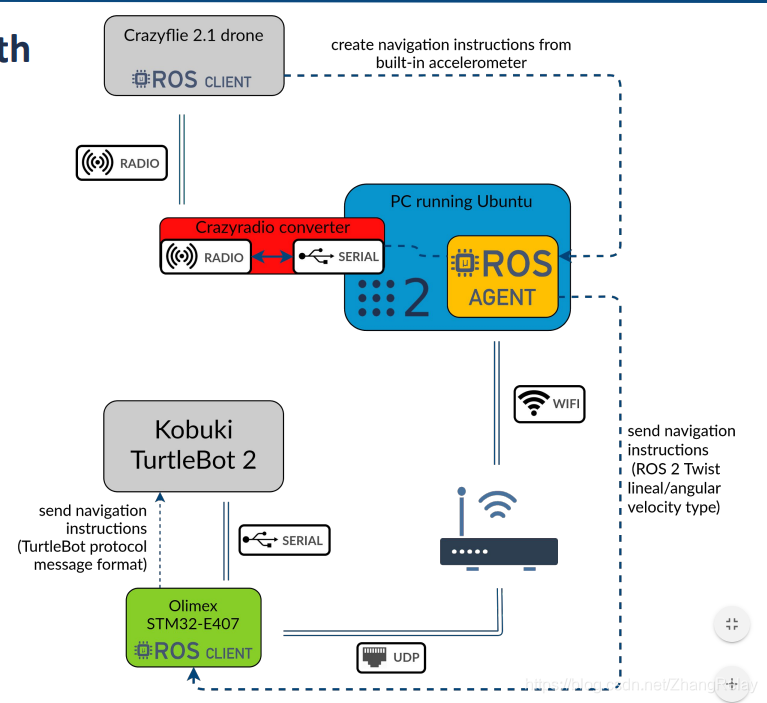
micro-ROS
这个是嵌入式重点啦,IoT神器啊
将ROS2放到微处理器中!!!
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/108784953

- 点赞
- 收藏
- 关注作者
评论(0)