ROS2机器人笔记20-10-24

【摘要】 最近,忙了一段时间现代控制理论和单片机理论和实践的课程,从传统的课程中看到了生机,将其结合机器人和操作系统等应用场景。
单片机使用操作系统,如contiki实现资源分配和网络节点功能,非常有趣;
现代控制理论用机器人平台完成控制算法测试也很好玩。ROS2我已经完全跟不上了……
只有机器人的蓝色星球
人类正在全力为这个星球打造一个没有人类的未来^_^ ...
最近,忙了一段时间现代控制理论和单片机理论和实践的课程,从传统的课程中看到了生机,将其结合机器人和操作系统等应用场景。
单片机使用操作系统,如contiki实现资源分配和网络节点功能,非常有趣;
现代控制理论用机器人平台完成控制算法测试也很好玩。ROS2我已经完全跟不上了……

人类正在全力为这个星球打造一个没有人类的未来^_^
高可靠网络控制机器人
- freedomrobotics
学机器人能干啥???
做个南瓜面具?
这两个ROS2问题很有趣:
行为树,状态机升级版
- BehaviorTree.CPP
区域全覆盖和轨迹跟踪PID
- full_coverage_path_planner
- tracking_pid
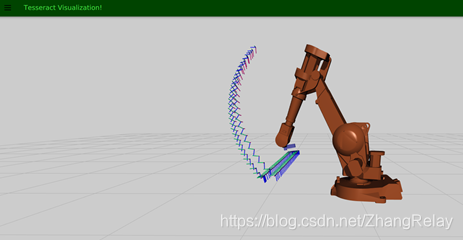
Ignition新机器人应用程序
- Tesseract
ROS2新动态:
- 全新的ROS2 Discovery Server 2.0:在大型系统中的快速且可扩展的Discovery。
- Micro-ROS-MoveIt集成
- Zenoh ROS2 DDS
- ROS 2 Moveit之Foxy版本
- 控制:使用动态且可组合的硬件API进行第一个演示,添加了关节极限接口,Controller Manager服务,为实时执行程序提供解决方案,以实现无锁行为
- Edge AI:支持ros-perception/image_pipeline
- 嵌入式:Micro XRCE-DDS代理的快速发布,将Micro-ROS移植到所有Zephyr支持的板上
- 导航:发布Hybrid-A */SmacPlanner等
- 实时:让Performance_test在专用的硬件平台上运行
- 安全:ROS 2中的软件看门狗https://github.com/ros-safety/software_watchdogs
- 加密:SROS2
- 工具:RViz2的设计/开发
- 中间件:直接使用DDS并避免rmw抽象的想法
ROS2不断添加中间件DDS支持,如rmw_ecal等
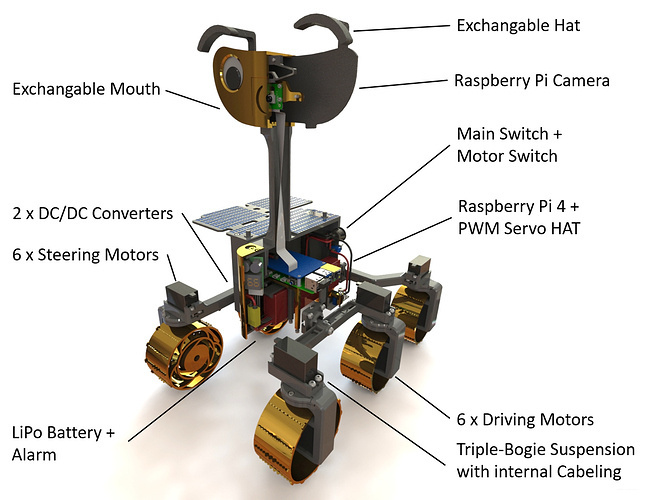
树莓派开源机器人:
还能怎么办只能坐等被时代淘汰并狠狠抛弃……
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/109266717

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)