ROS2与ESP8266调试记录ROS2与Arduino串口和WiFi测试记录(Due和ESP32)

【摘要】 官方和Github没有给出ESP8266与ROS2的连接方式,只有ROS1。
ESP8266与ROS2连接与ESP32几乎一致,但是由于资源有限,无线并不稳定,串口正常,具体参考:
ROS2与Arduino串口和WiFi测试记录(Due和ESP32)
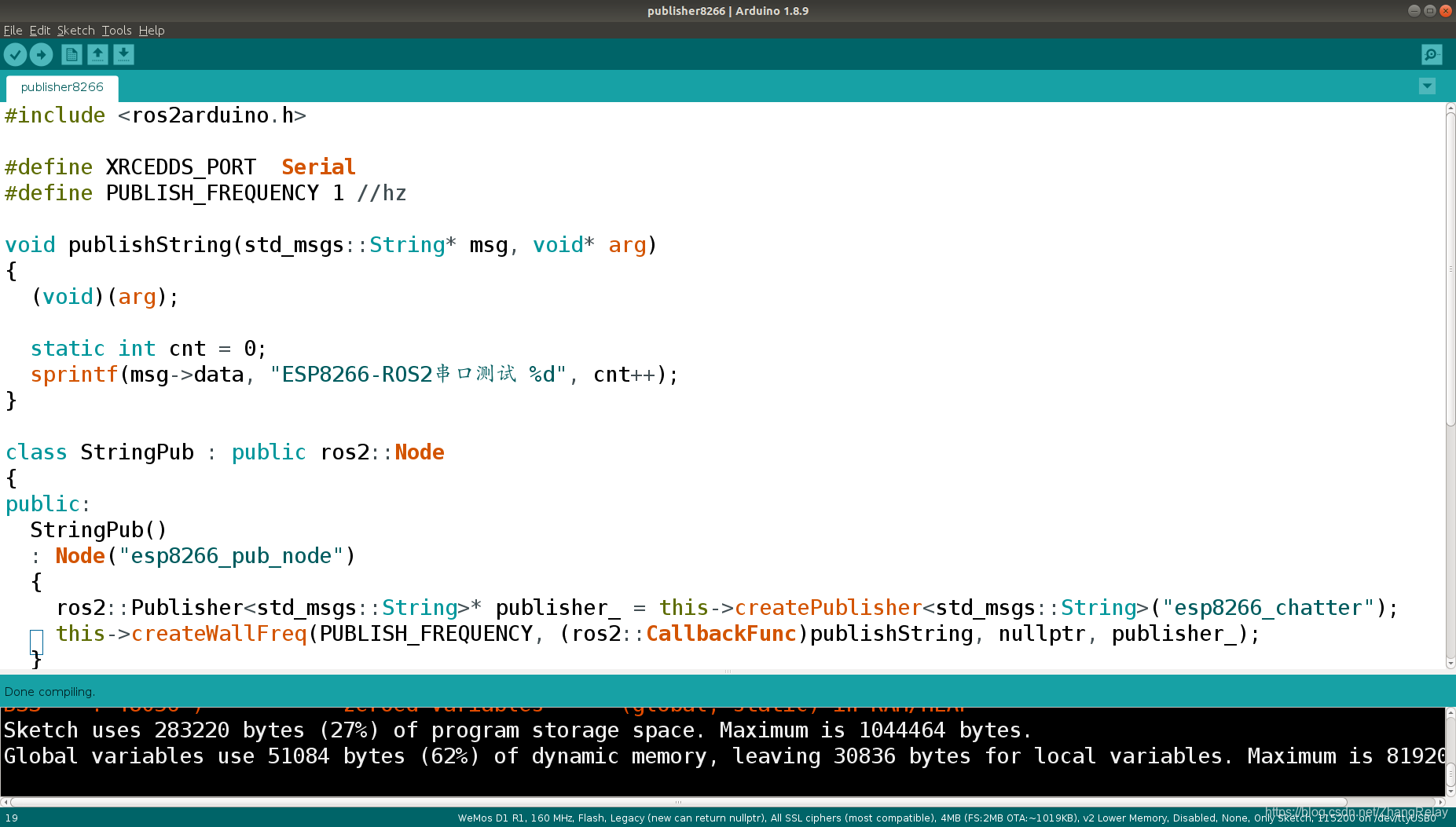
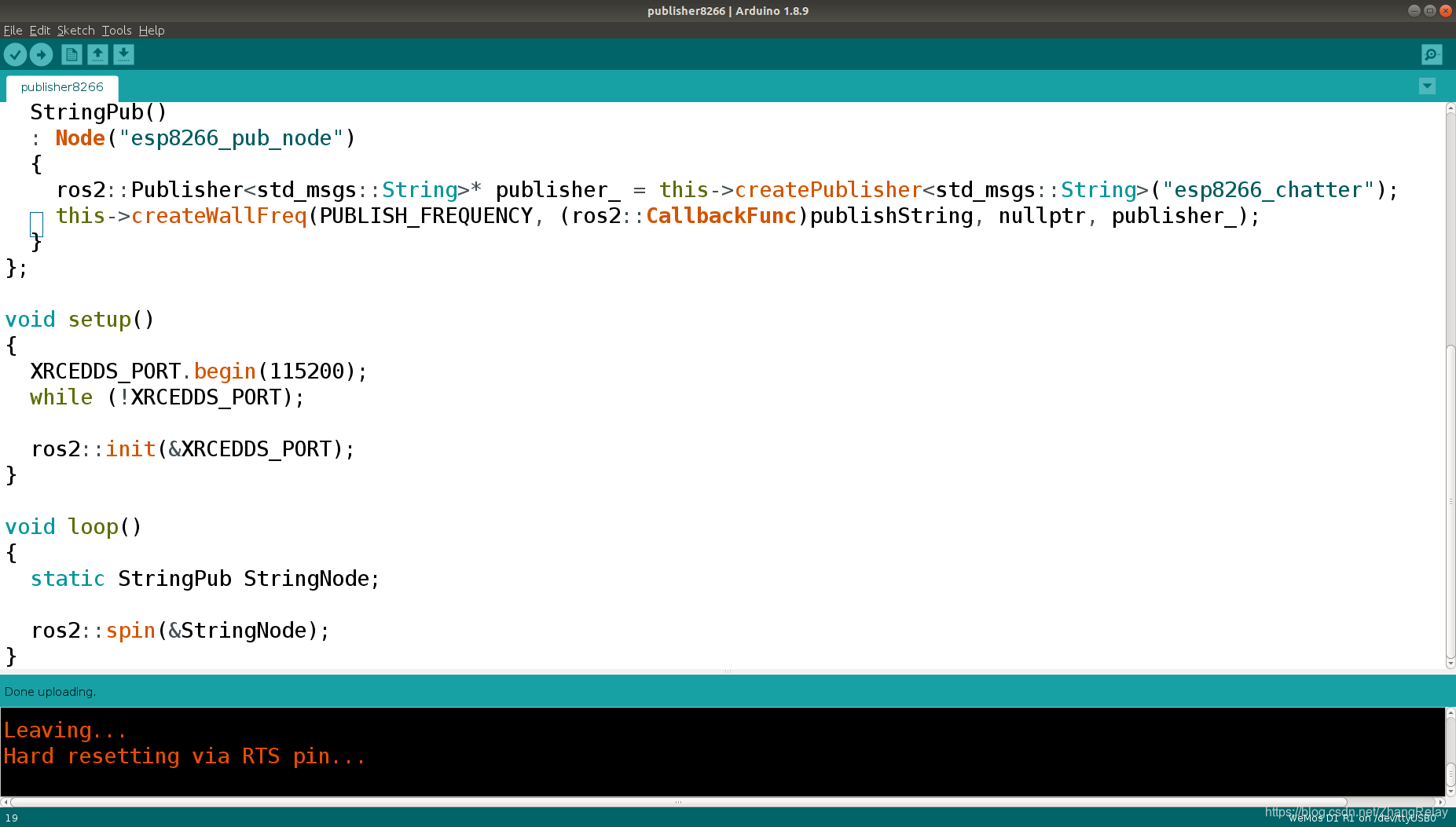
部分测试结果如下,修改代码如图所示:
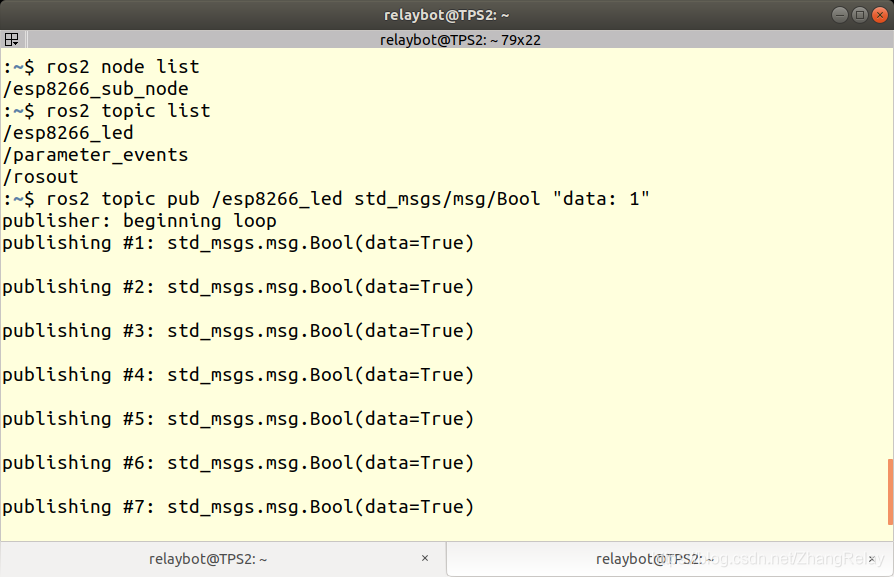
发布---
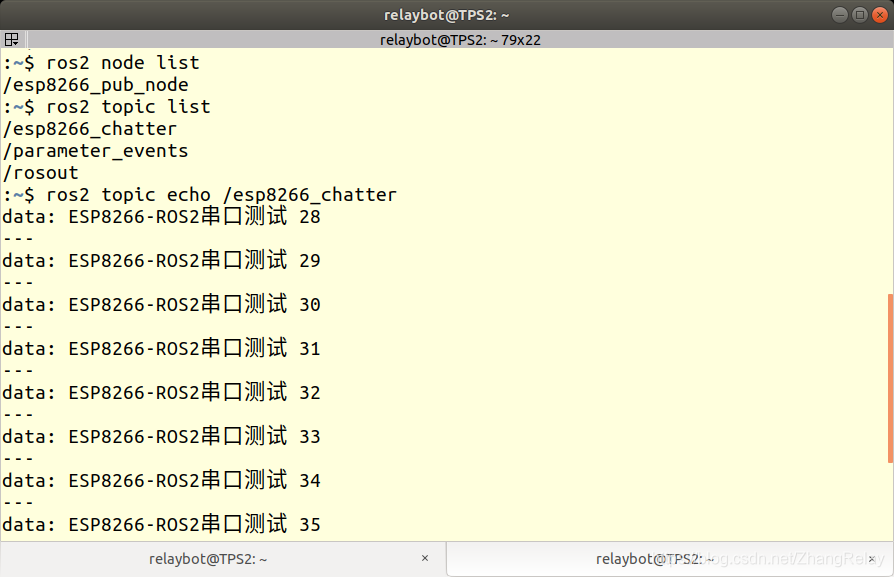
终端测试效果:
使用wifi测试: ...
官方和Github没有给出ESP8266与ROS2的连接方式,只有ROS1。
ESP8266与ROS2连接与ESP32几乎一致,但是由于资源有限,无线并不稳定,串口正常,具体参考:
部分测试结果如下,修改代码如图所示:
发布---
终端测试效果:
使用wifi测试:
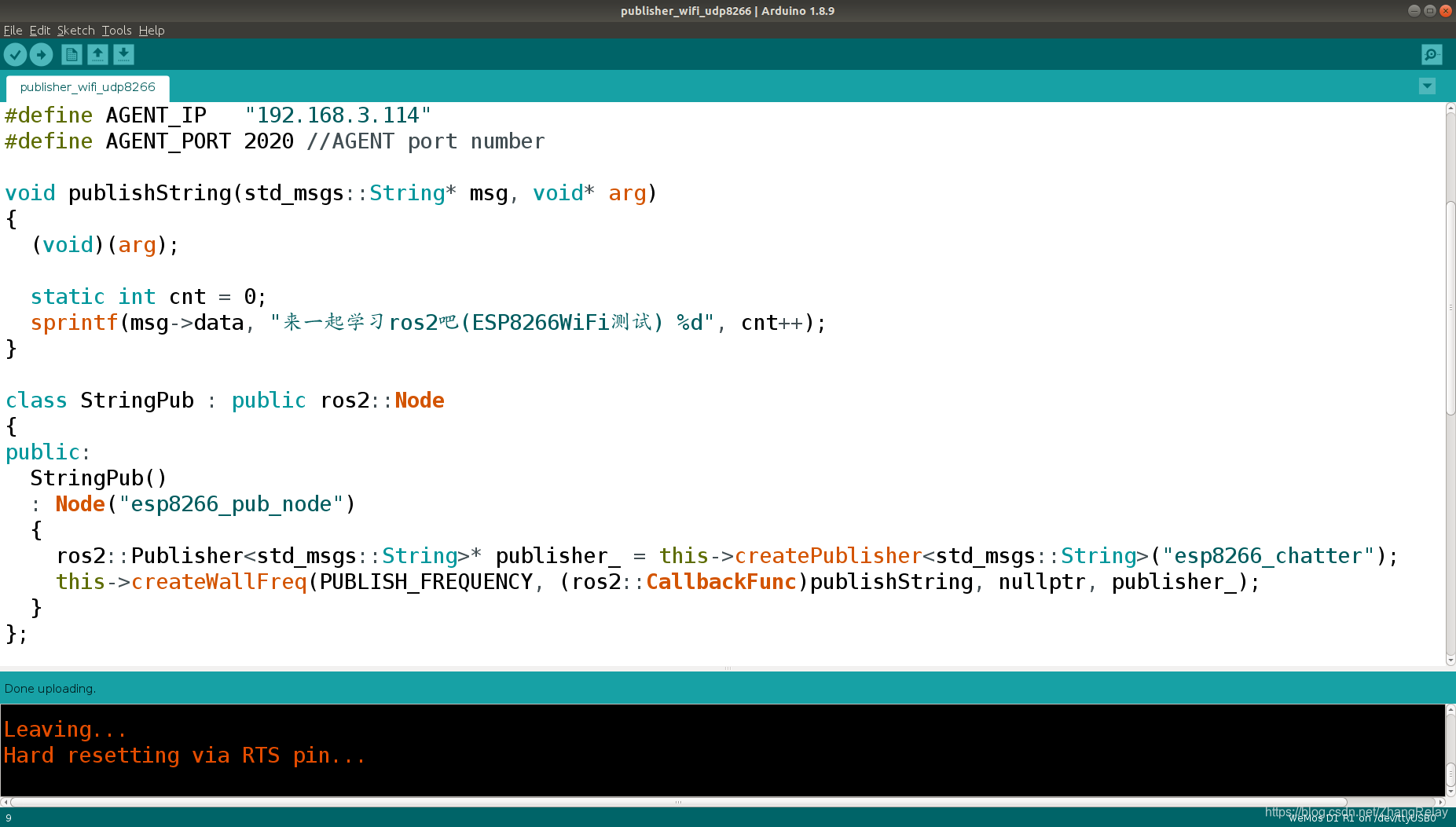
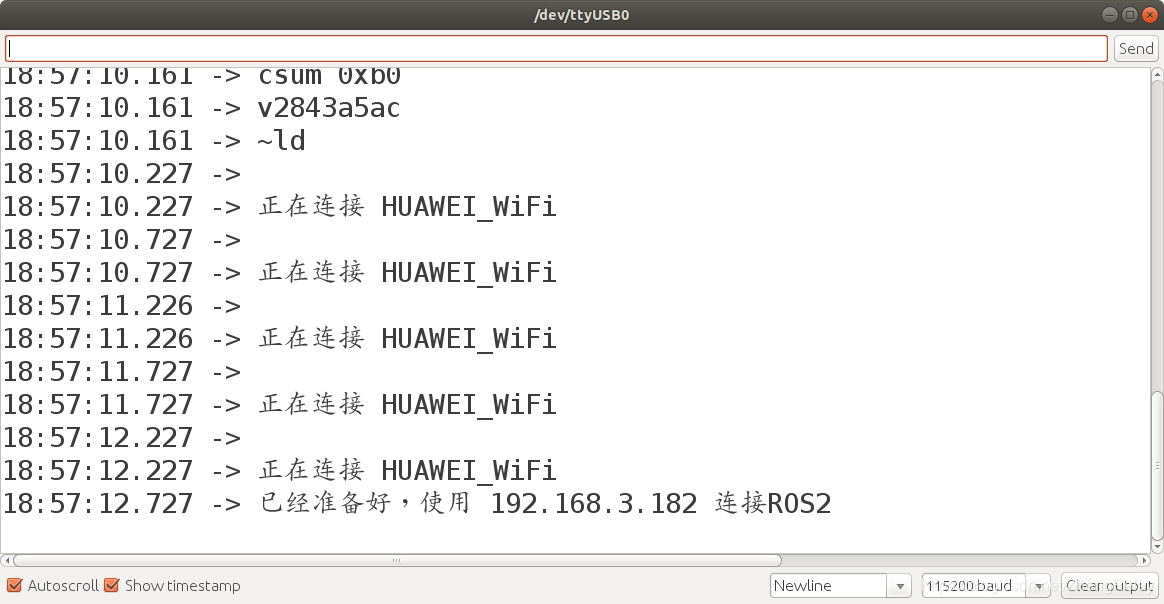
系统会重置,不稳定。
接收---
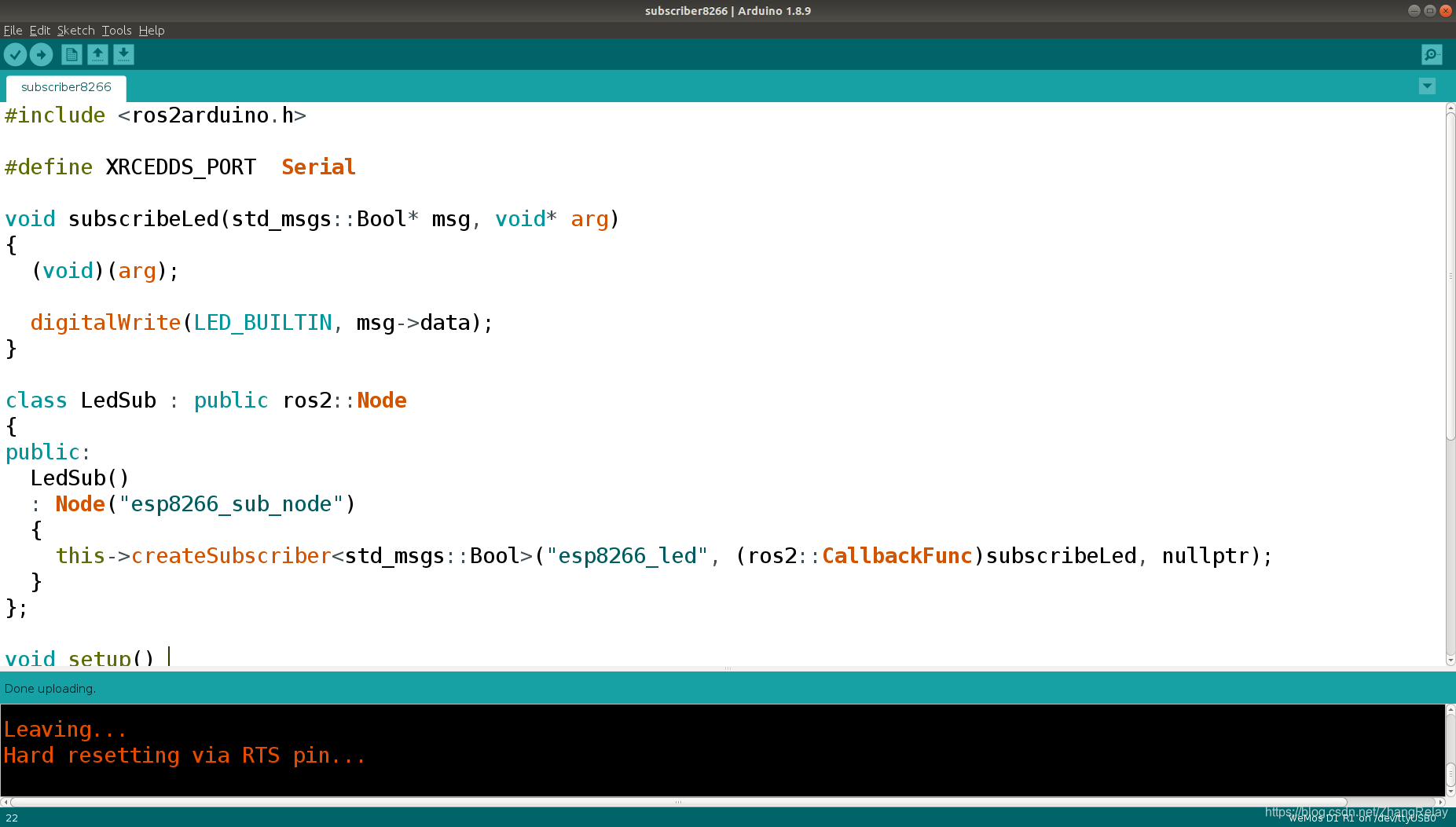
通过接收,点亮或关闭LED:
具体代码和实现内容均与ESP32一致。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/109480444

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)