ROS2Foxy和ArduinoESP32消息和速度指令发布调试笔记

【摘要】 ROS2对节点信息稳定性有要求,如果用wifi等节点间时延过长会导致无法成功,部分路由器也会有不兼容情况(DDS大法好奇妙),请一定注意!
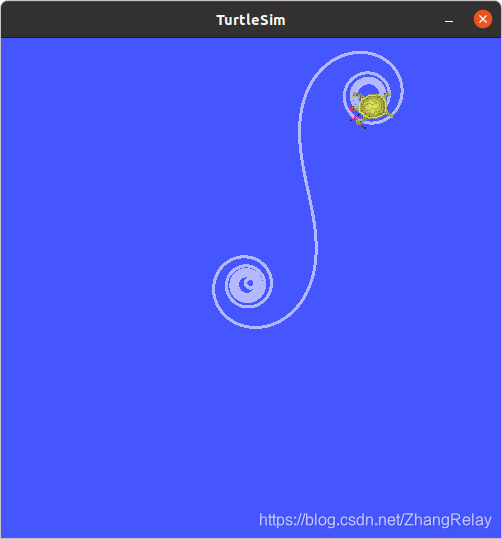
(turtlesim版)cmdel
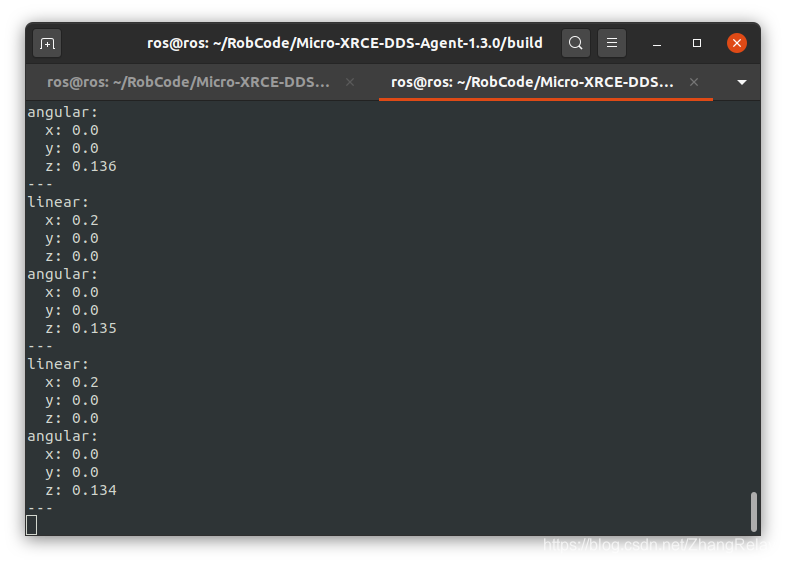
echo cmdvel
手机热点IP和时延:
手机热点IP
时延-一般为20-30ms
手机热点易出现无法...
ROS2对节点信息稳定性有要求,如果用wifi等节点间时延过长会导致无法成功,部分路由器也会有不兼容情况(DDS大法好奇妙),请一定注意!
手机热点IP和时延:
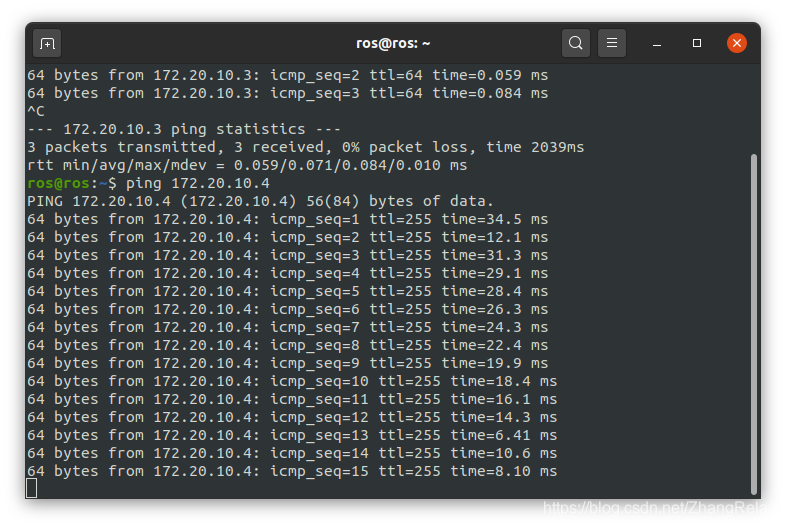
手机热点易出现无法连接成功的情况!DDS累觉不爱了……不爽了!一定要快,快,快!!!
路由器IP和时延:
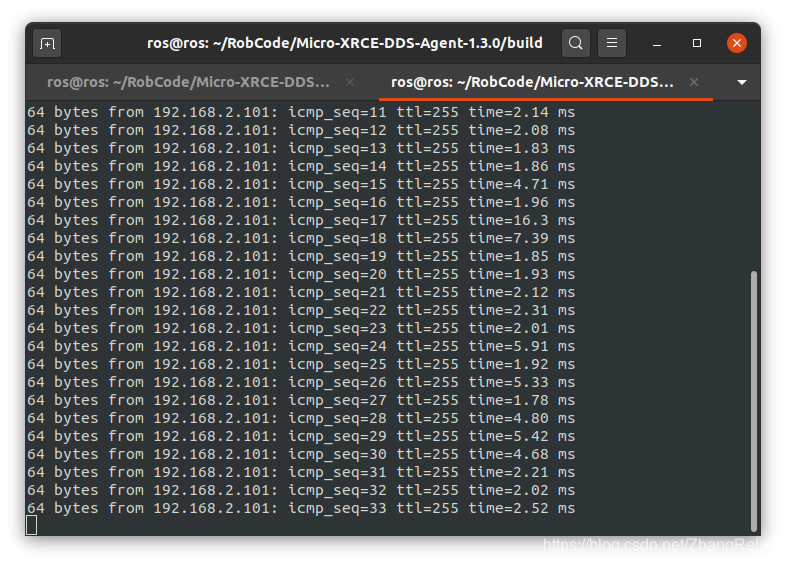
使用路由器稳定可靠,路由器越神奇(DDS爱它),ros2消息发布接收越稳定,就是容易成功建立连接。
这样效果,代码如下:
-
#include <ros2arduino.h>
-
-
#include <WiFi.h>
-
#include <WiFiUdp.h>
-
#define SSID "****"
-
#define SSID_PW "****"
-
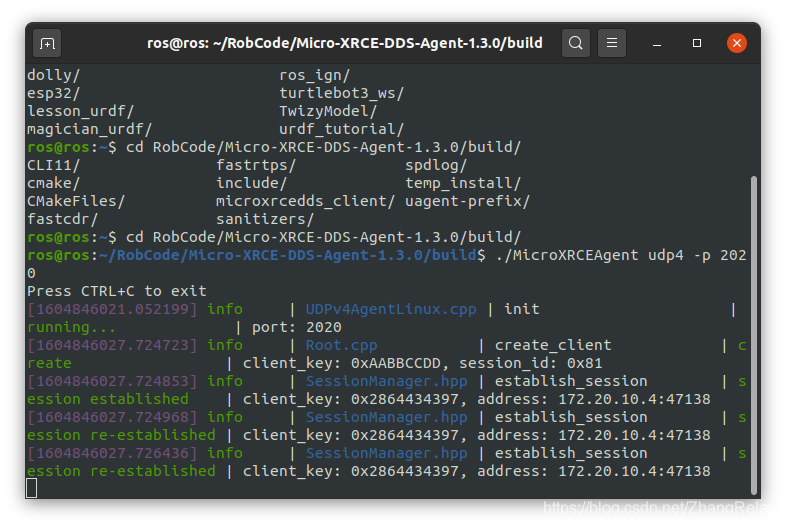
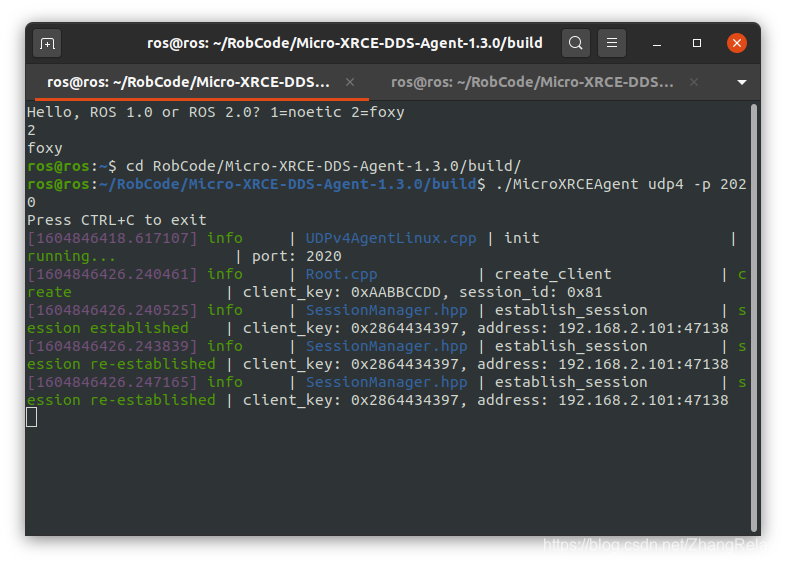
#define AGENT_IP "****"
-
#define AGENT_PORT 2020 //AGENT port number
-
-
#define PUBLISH_FREQUENCY 10 //hz
-
-
void publishString(geometry_msgs::Twist* msg, void* arg)
-
{
-
(void)(arg);
-
static int cnt = 0;
-
// msg->linear.x = ((double)rand()/(RAND_MAX)); //随机线速度
-
// msg->angular.z = ((double)rand()/(RAND_MAX)); //随机角速度
-
msg->linear.x = 0.2; //固定线速度
-
msg->angular.z = 1.0 - 0.001*cnt; //变化角速度
-
cnt++;
-
}
-
-
class StringPub : public ros2::Node
-
{
-
public:
-
StringPub()
-
: Node("esp32_cmdvel")
-
{
-
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("turtle1/cmd_vel");
-
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishString, nullptr, publisher_);
-
}
-
};
-
-
WiFiUDP udp;
-
-
void setup()
-
{
-
WiFi.begin(SSID, SSID_PW);
-
while(WiFi.status() != WL_CONNECTED);
-
-
ros2::init(&udp, AGENT_IP, AGENT_PORT);
-
}
-
-
void loop()
-
{
-
static StringPub StringNode;
-
-
ros2::spin(&StringNode);
-
}
具体调试过程全部录屏了,看视频跟着做就好啦。
消息发布测试:
ROS2和ESP32消息发布测试
速度指令发布测试:
ROS2和ESP32速度指令发布测试
这段视频的最后将问题暴露出来,请注意!时延大于50ms以上无法建立可靠连接的!
分析和解决方法,更换路由器或者重启手机热点:
IP时延测试
彩蛋在视频中,“悟”
(turtlesim版)
~Fin~
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/109566819

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)