webots和ros2笔记08-分封

如果阅读完webots_ros2源码,到此已经接近尾声了,为何?已经入门webots和ros2了。
是否需要继续研究就看需求了!推荐阅读下文:
学完ros2基础和webots基础最多需要8+8=16小时足矣,每天学习3小时,一周搞定!
分封就是在基础掌握之后,开始划分专业方向了,只有基础教程是所有使用ros2和webots的必修课。
此处罗列一些官方案例,源码分析依据留言进行选择更新,受众太少,不会统一更新课程的。
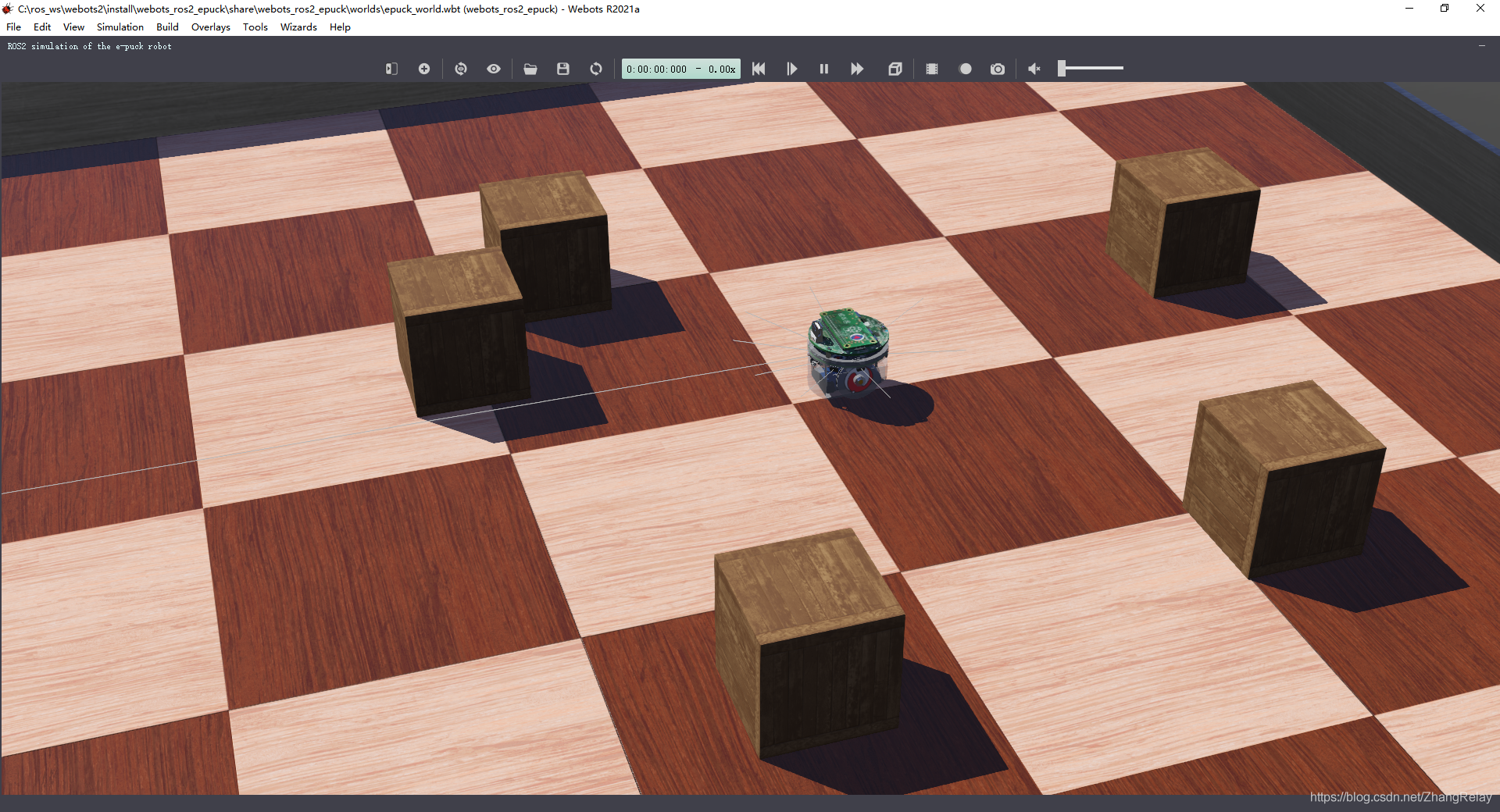
E-puck
E-puck是一款微型移动机器人,最初由EPFL开发。
ros2 launch webots_ros2_epuck robot_launch.py
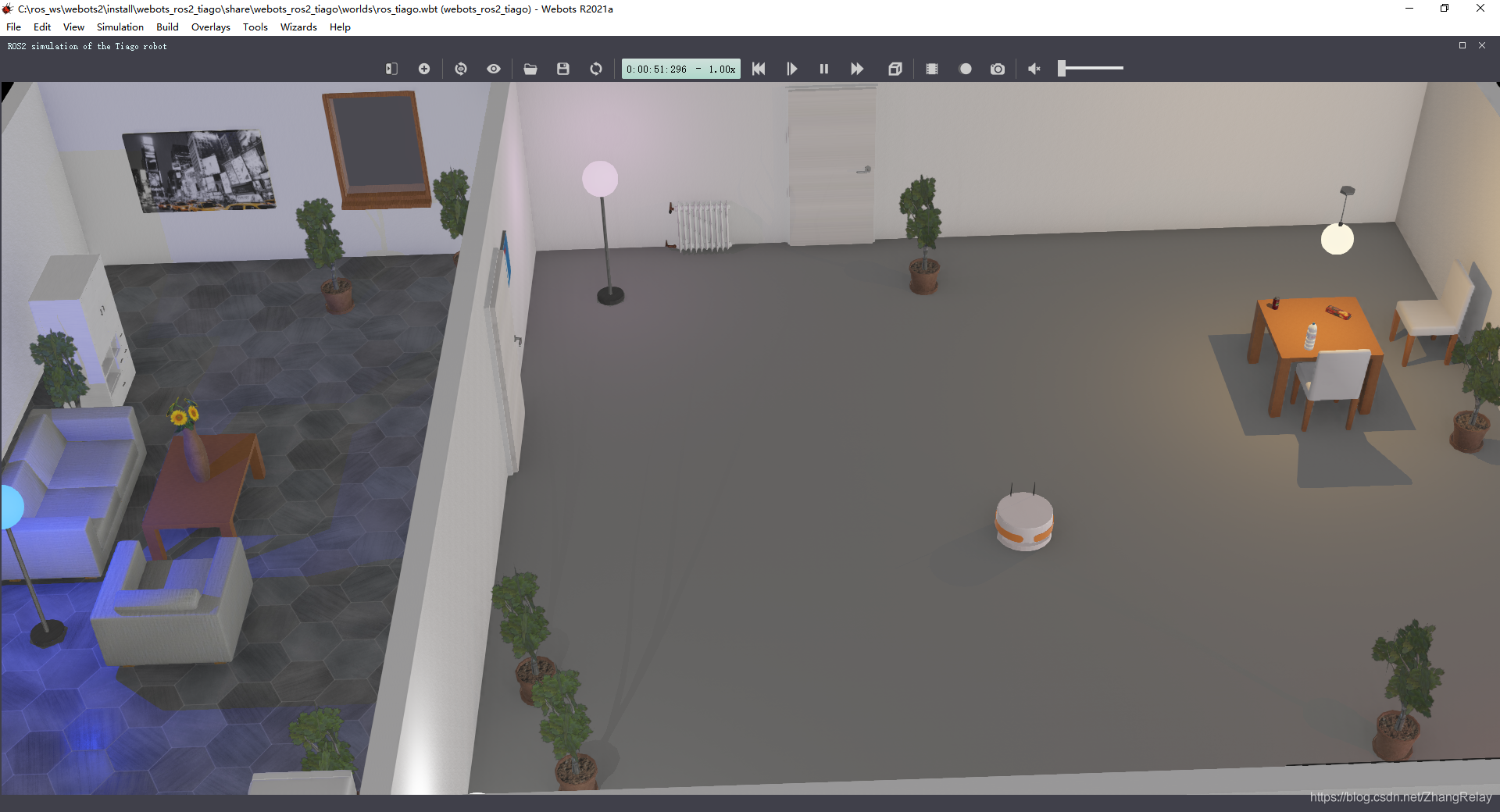
TIAGo
TIAGo机器人开箱即用地融合了感知,导航,操纵和人机交互技能!
ros2 launch webots_ros2_tiago tiago.launch.py

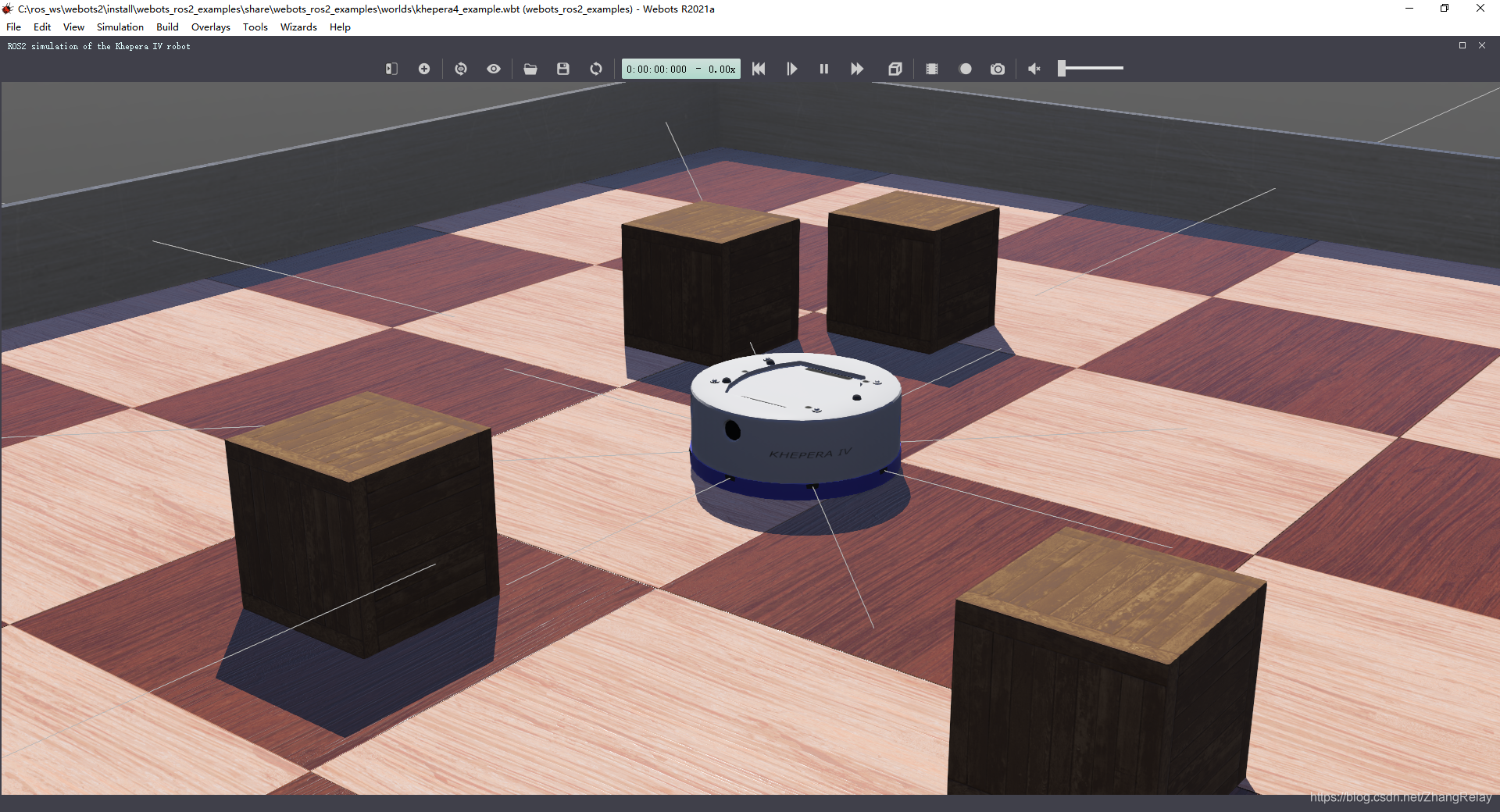
Khepera IV
Khepera IV是一款紧凑型机器人,设计用于任何室内实验室应用(桌子,实验室地板)。
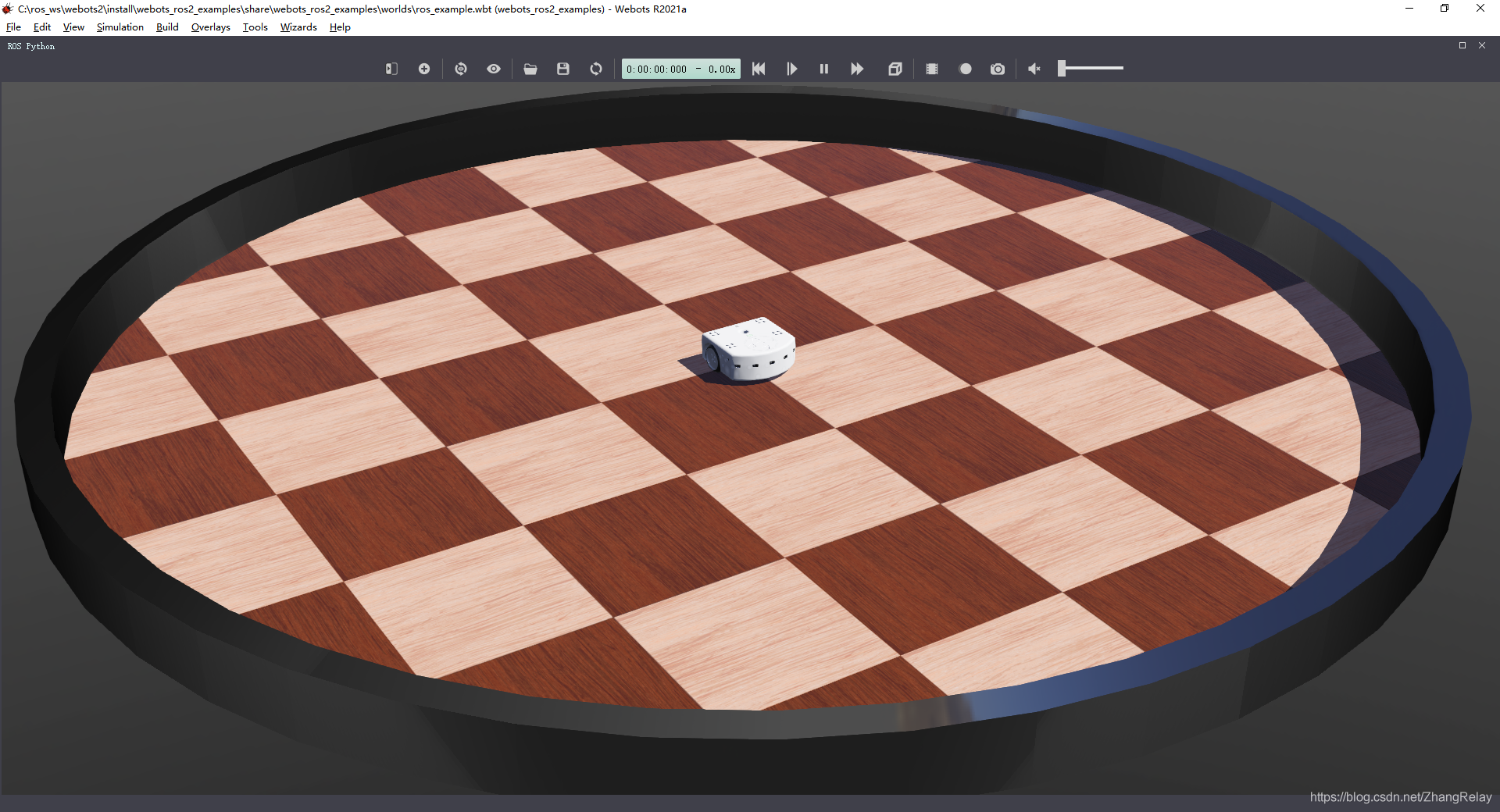
TurtleBot3 Burger
TurtleBot3是一款小型,价格适中,可编程的,基于ROS的移动机器人,用于教育,研究,业余爱好和产品原型制作。
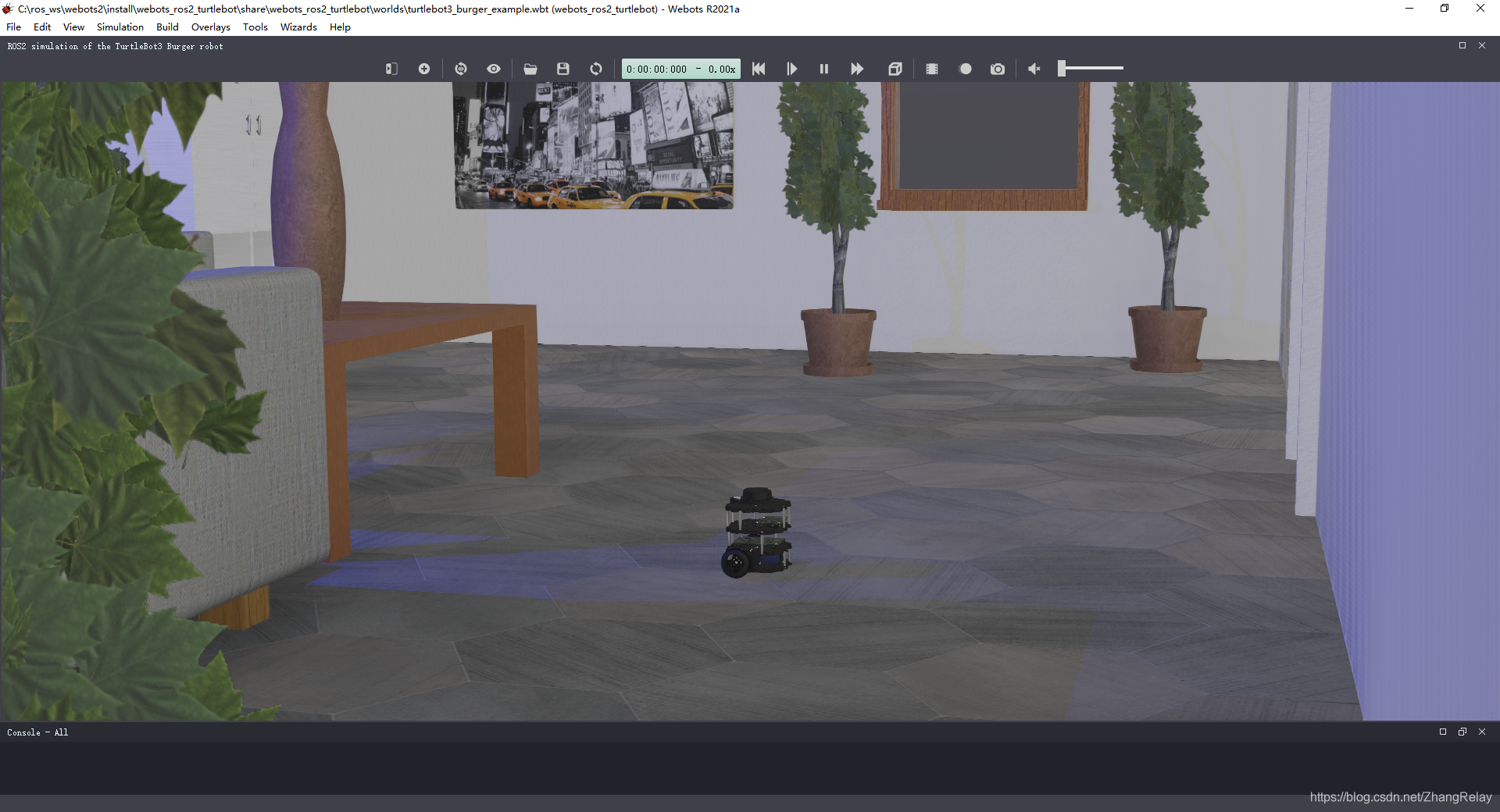
导航和SLAM案例参考之前博客。
Thymio II
Thymio II机器人提供了一个非常简单的ROS2节点,启动文件和仿真。这是一个使用自定义模拟机器人创建自定义模拟和ROS2接口的良好起点。
Universal Robots
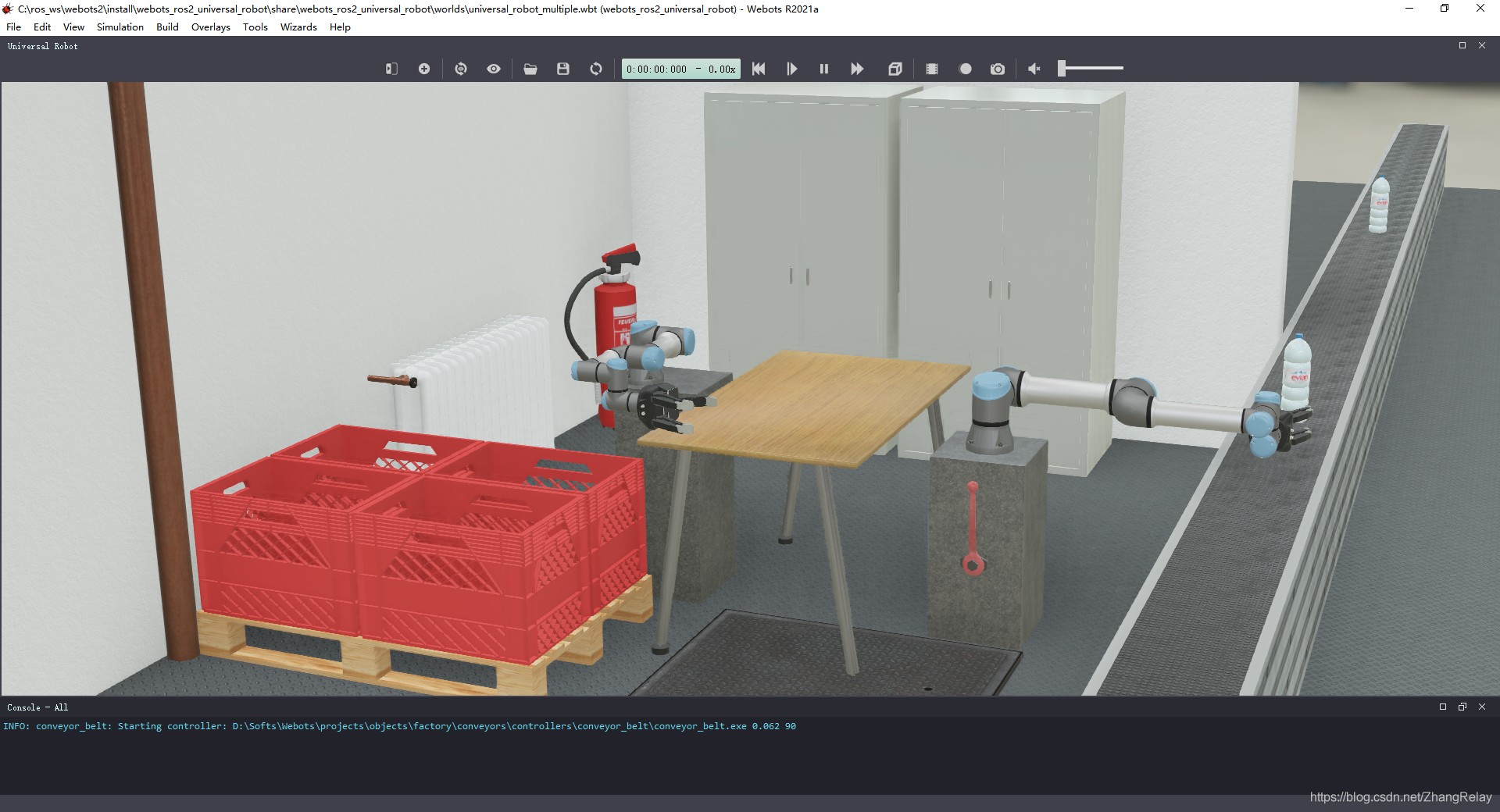
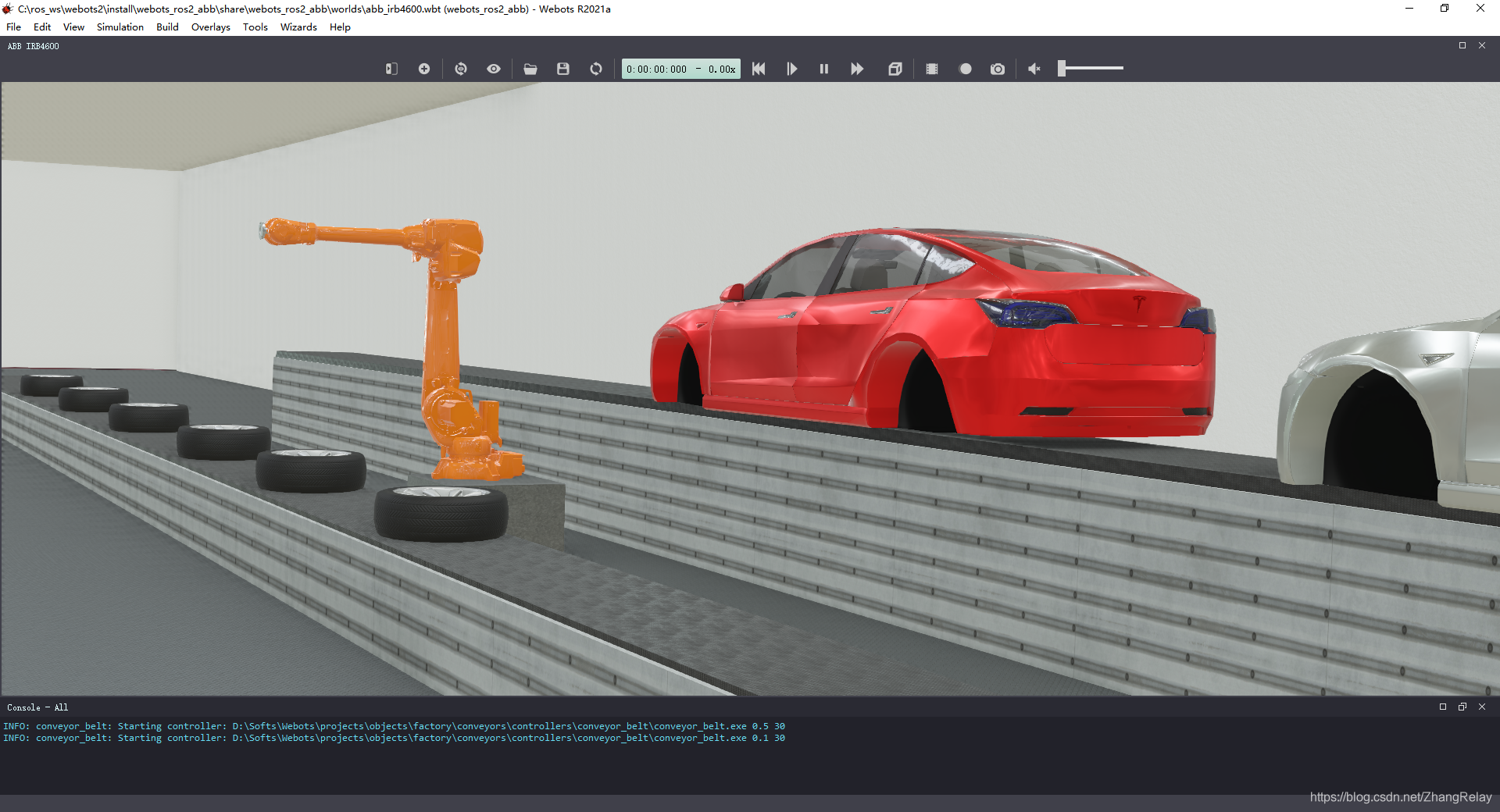
ABB IRB4600
最后,预祝各位朋友和机器人爱好者,webots和ros2学习,研究,探索之旅开心愉悦^_^
^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^ ^_^
参考如下:
- E-puck for ROS2 Beginners
- Create Webots Robot
- Write ROS2 Driver
- Using URDF or Xacro
- Navigate TurtleBot3
- SLAM with TurtleBot3
- Wheeled robots
- Robotic arms
Internal
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/112795901

- 点赞
- 收藏
- 关注作者
评论(0)