ROS2机器人笔记20-11-22

没有什么能阻挡micro-ros了!!!
两个主题:
- AIoT:discourse.ros.org/t/micro-ros-goes-aiot/17407
- TCP:discourse.ros.org/t/ros-2-to-micro-ros-tcp-tunneling-via-integration-service/17453
顶级竞赛和学习指南:github.com/osrf/subt_hello_world
开放式人形机器人

micro-ros tcp
通过集成服务将ROS 2转换为微型ROS TCP隧道!来自ROS Discourse General
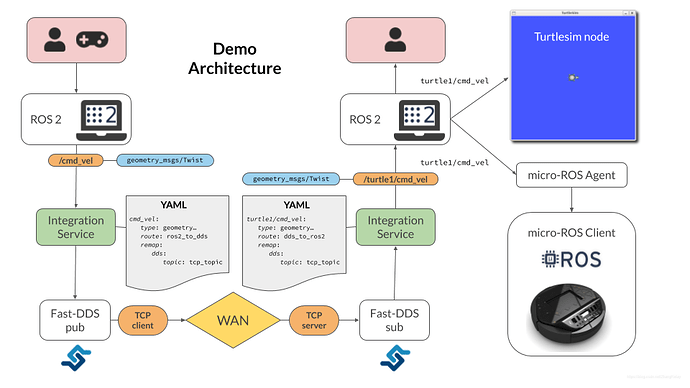
在eProsima,我们一直在致力于结合我们的一些尖端技术的新演示!该演示演示了如何借助快速DDS TCP功能以及Integration Service(集成工具)使由不同子网托管的两个单独的ROS 2数据空间通过Internet进行通信,该工具可实现任何协议与DDS的互通。该设置包括一个ROS 2节点,该ROS 2节点通过WAN向Turtlesim应用程序发布速度指令,并发布到运行Kobuki Turtlebot2的微型ROS节点,两者均在远程集线器上运行。
在第一个数据空间中,我们有一个ROS 2发布者通过Twist类型的消息发送数据。更详细地,joy节点负责从游戏手柄获得位移命令,然后由第二teleop_twist_joy节点将其转换为ROS 2可理解的Twist类型消息。
第二个数据空间处理两个下标,它们接收由teleop_twist_joy节点发送的Twist主题。第一个下标者是Turtlesim应用程序,负责根据远程节点收到的指示在其图形界面中替换经典的虚拟乌龟。第二个下标是一个微型ROS客户端,它通过代理与ROS 2数据空间进行通信,该代理使其可以订阅Twist主题。micro-ROS根据收到的数据,指示由运行FreeRTOS的ESP32 MCU操作的Kobuki Turtlebot2相应地移动。
远程通信由Integration Service进行中介,它可以将ROS 2消息转换为Fast DDS可以理解的语言,并且由于后者的TCP功能,它可以通过WAN连接在两个子网中启动的实例。因此,我们可以看到Kobuki机器人和Turtlesim在通过远程游戏手柄进行操作时如何运动。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/109966902

- 点赞
- 收藏
- 关注作者
评论(0)