ROS2机器人笔记20-12-08

【摘要】 ROS2生态进一步丰富
Ignition社区定期会议(The Ignition Dev Team)ROS工业会议(A Proposal for a Reference ROS2 Hardware Interface Implementation)Microsoft 人机交互机器人Human Inclusive RoboticsROS Rust工作会议Edge AI工作会议A...
ROS2生态进一步丰富
- Ignition社区定期会议(The Ignition Dev Team)
- ROS工业会议(A Proposal for a Reference ROS2 Hardware Interface Implementation)
- Microsoft 人机交互机器人Human Inclusive Robotics
- ROS Rust工作会议
- Edge AI工作会议
- ANYbotics
DARPA Cave

Unity ROS

Virtual Ocean Robotics竞赛

韩国的5G物流小车

放入包裹示例

一个机器人特写

小车编队

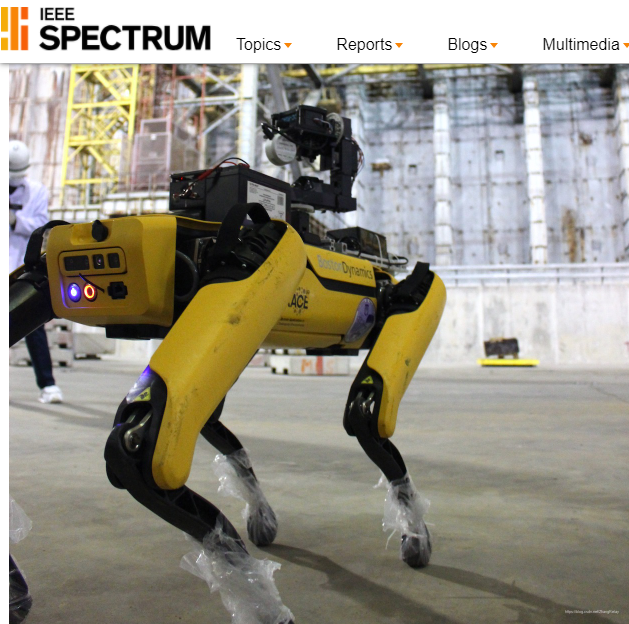
网红机器人狗Spot(Boston Dynamics)进入切尔诺贝利
“由于切尔诺贝利核电站的大片区域人们无法进入,因此需要像Spot这样的机器人进行测量环境特征。”
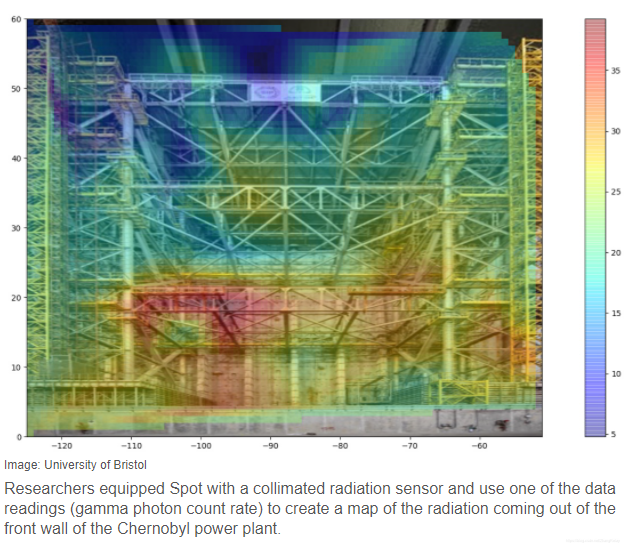
研究人员为Spot配备了准直辐射传感器,并使用数据读数之一(伽马光子计数率)创建了切尔诺贝利电厂前壁发出的辐射图。
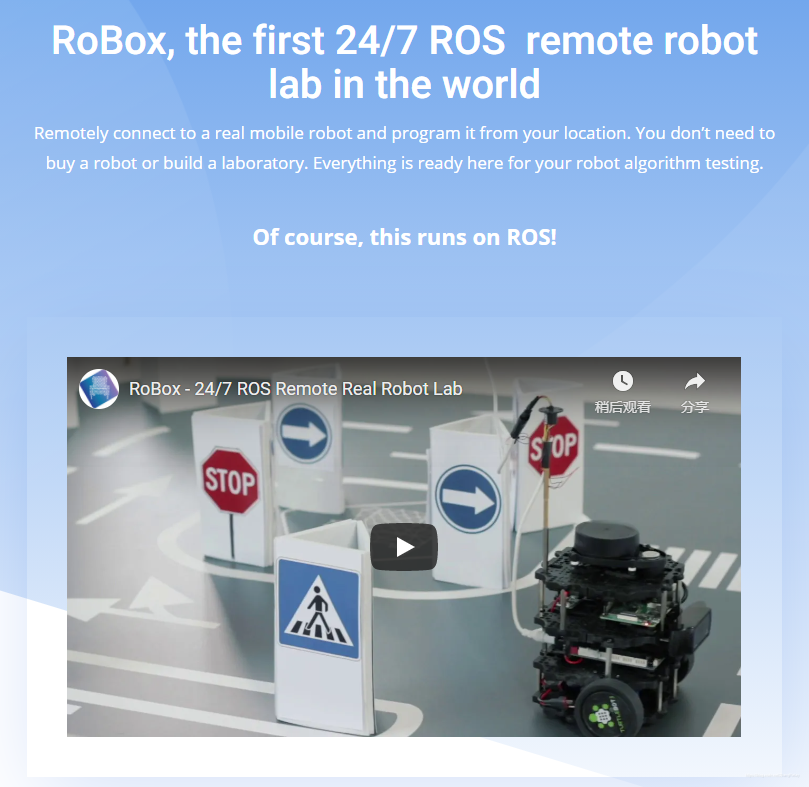
RoBox远程7x24真实机器人实验室
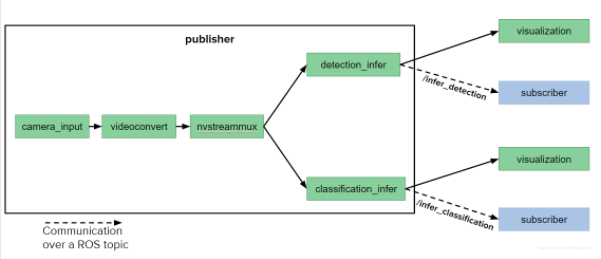
DeepStream应用程序的ROS2节点
- github.com/nvidia-ai-iot/ros2_deepstream

Learning Quadrupedal Locomotion over Challenging Terrain

micro-ros-agent-on-snap
github.com/eProsima/Fast-DDS
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/110895569

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)