Linux手机使用catkin_make编译ROS机器人操作系统入门教程功能包记录

【摘要】 这不是一篇零基础文章,需要先阅读之前博客,流程和在电脑上没有太大区别:
Ubports系列:https://blog.csdn.net/ZhangRelay/article/details/113921925
简单流水账:
到ros_tutorials文件夹下,使用catkin_make编译!
耐心等待编译完成!
看看效果吧!
先...
这不是一篇零基础文章,需要先阅读之前博客,流程和在电脑上没有太大区别:
简单流水账:
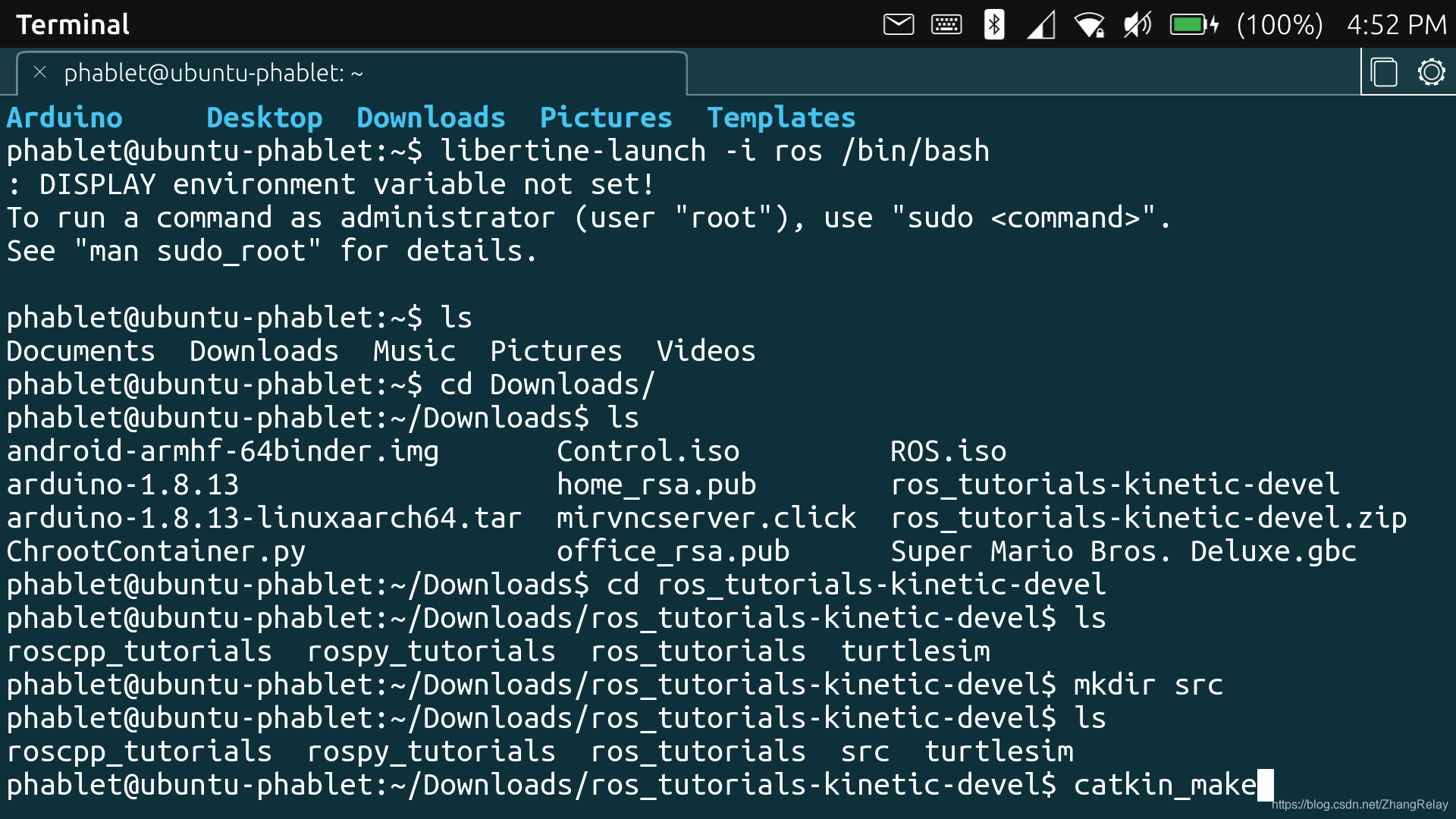
到ros_tutorials文件夹下,使用catkin_make编译!
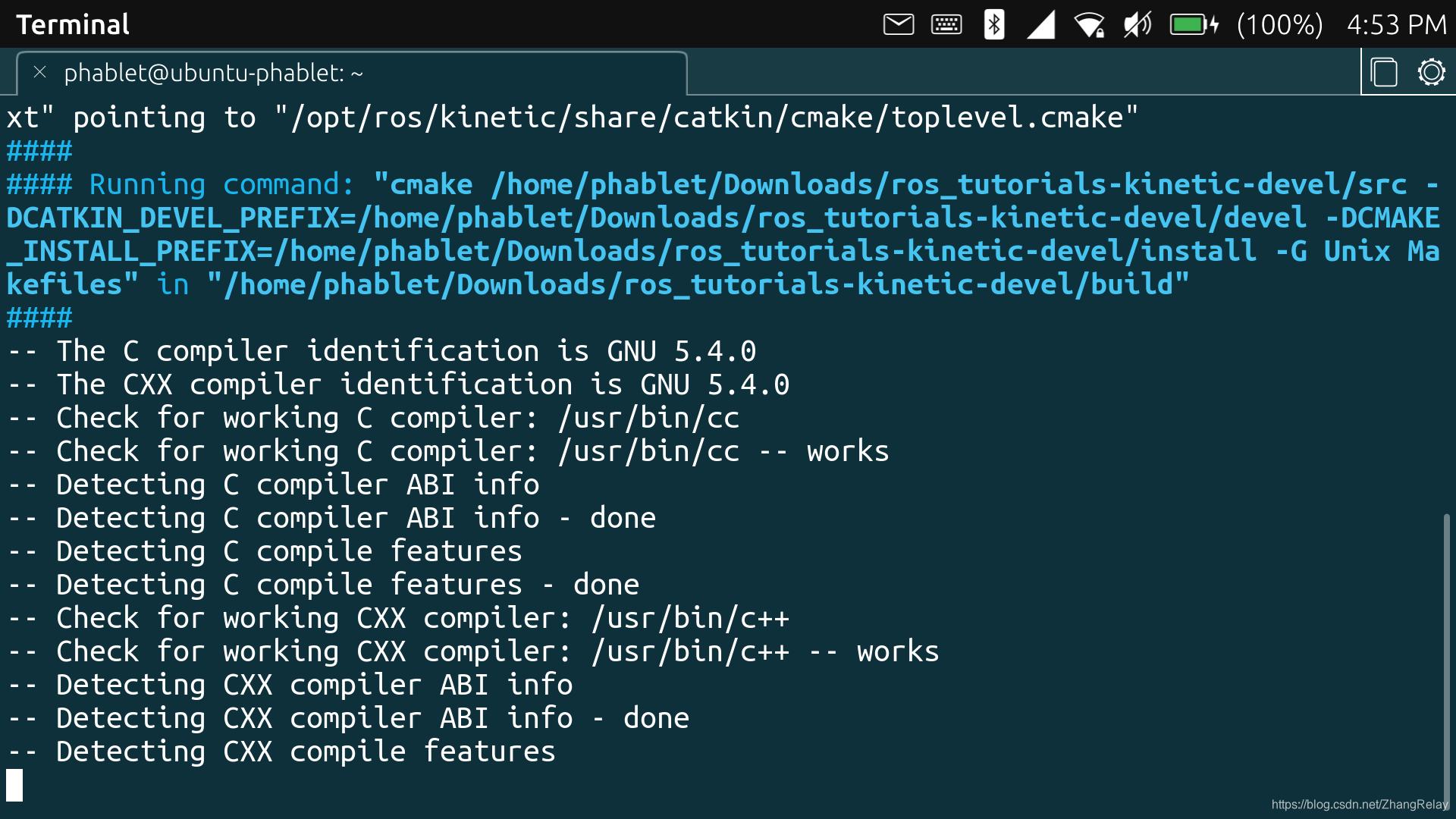
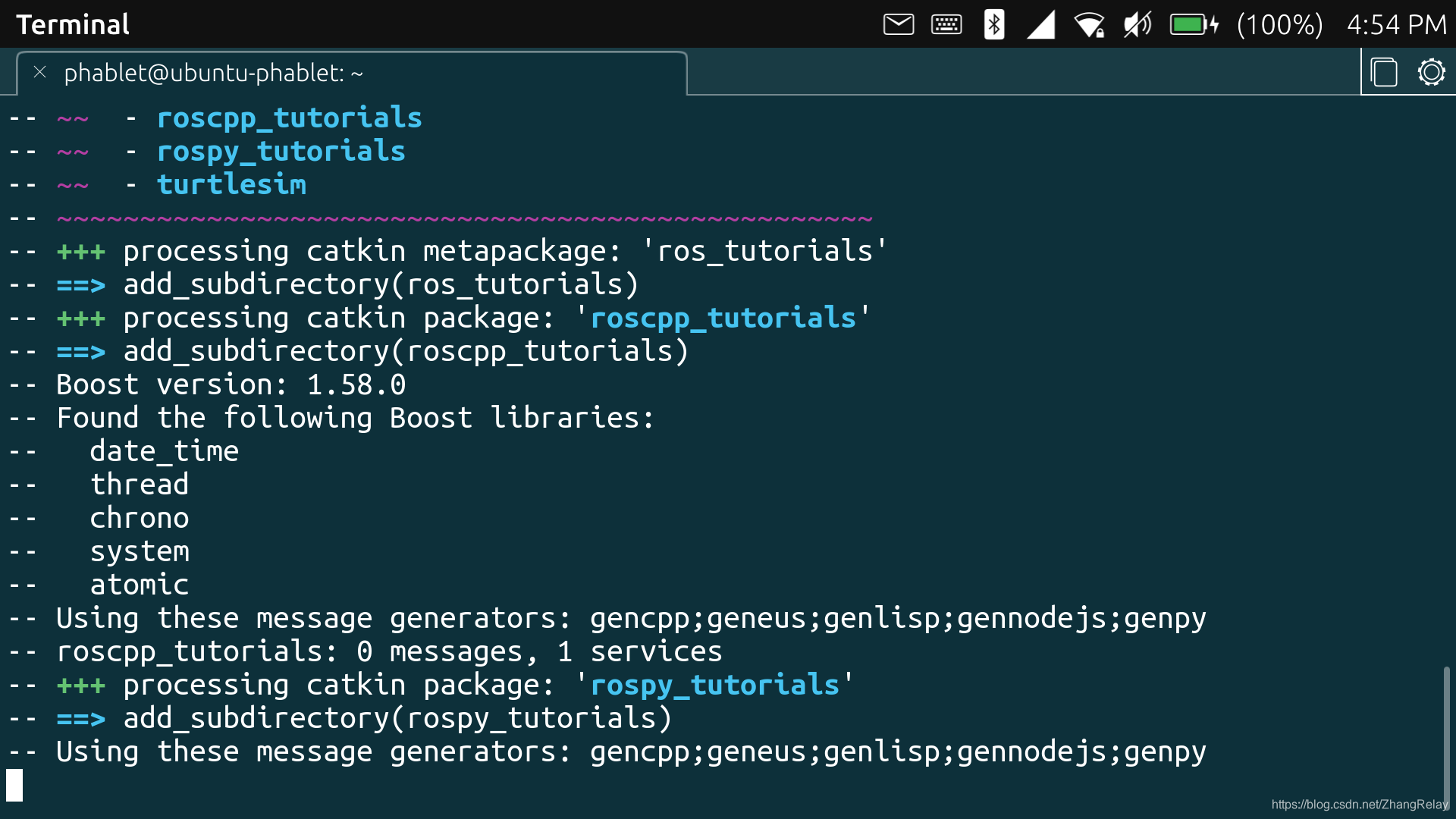
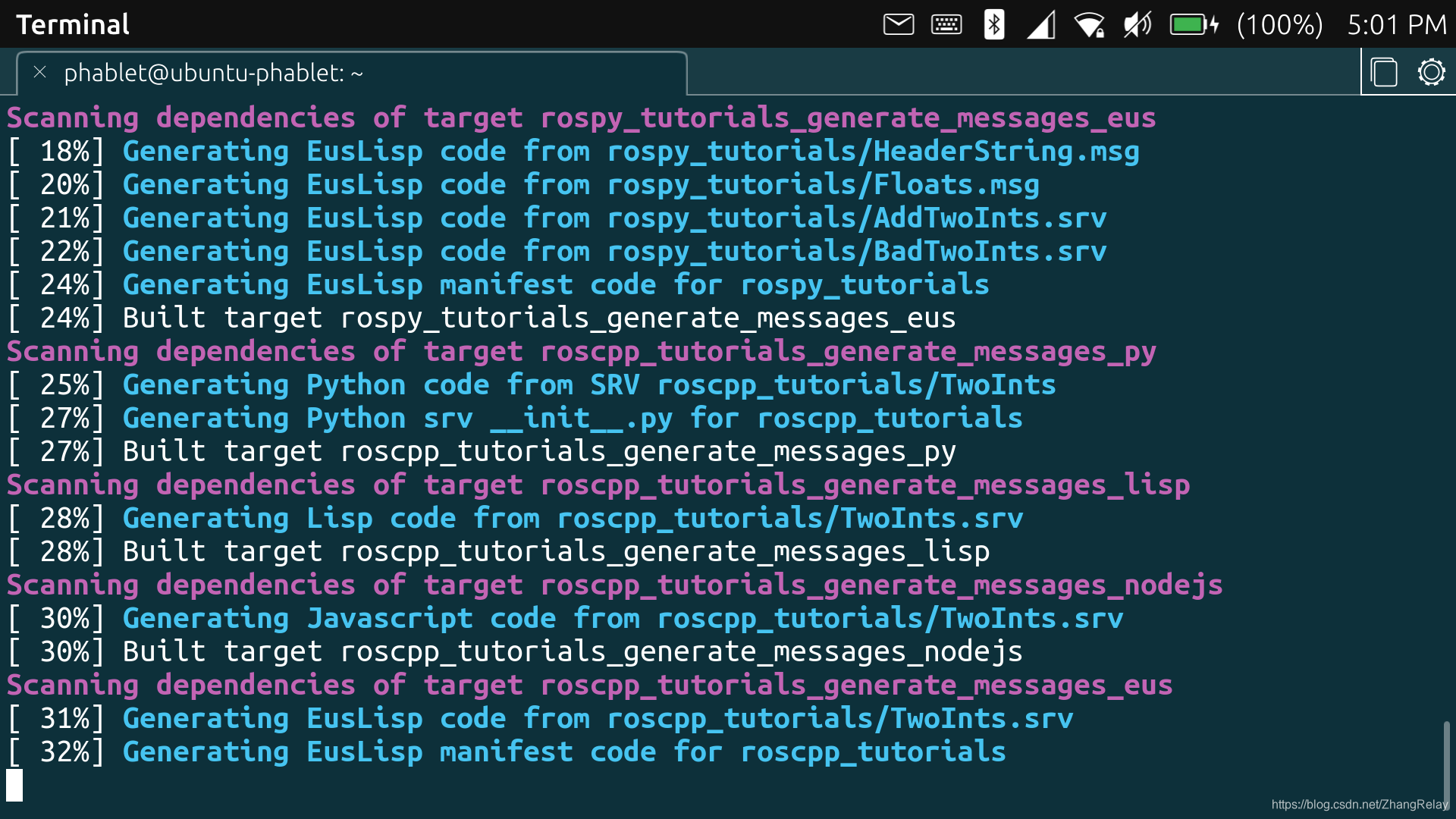
耐心等待编译完成!
看看效果吧!
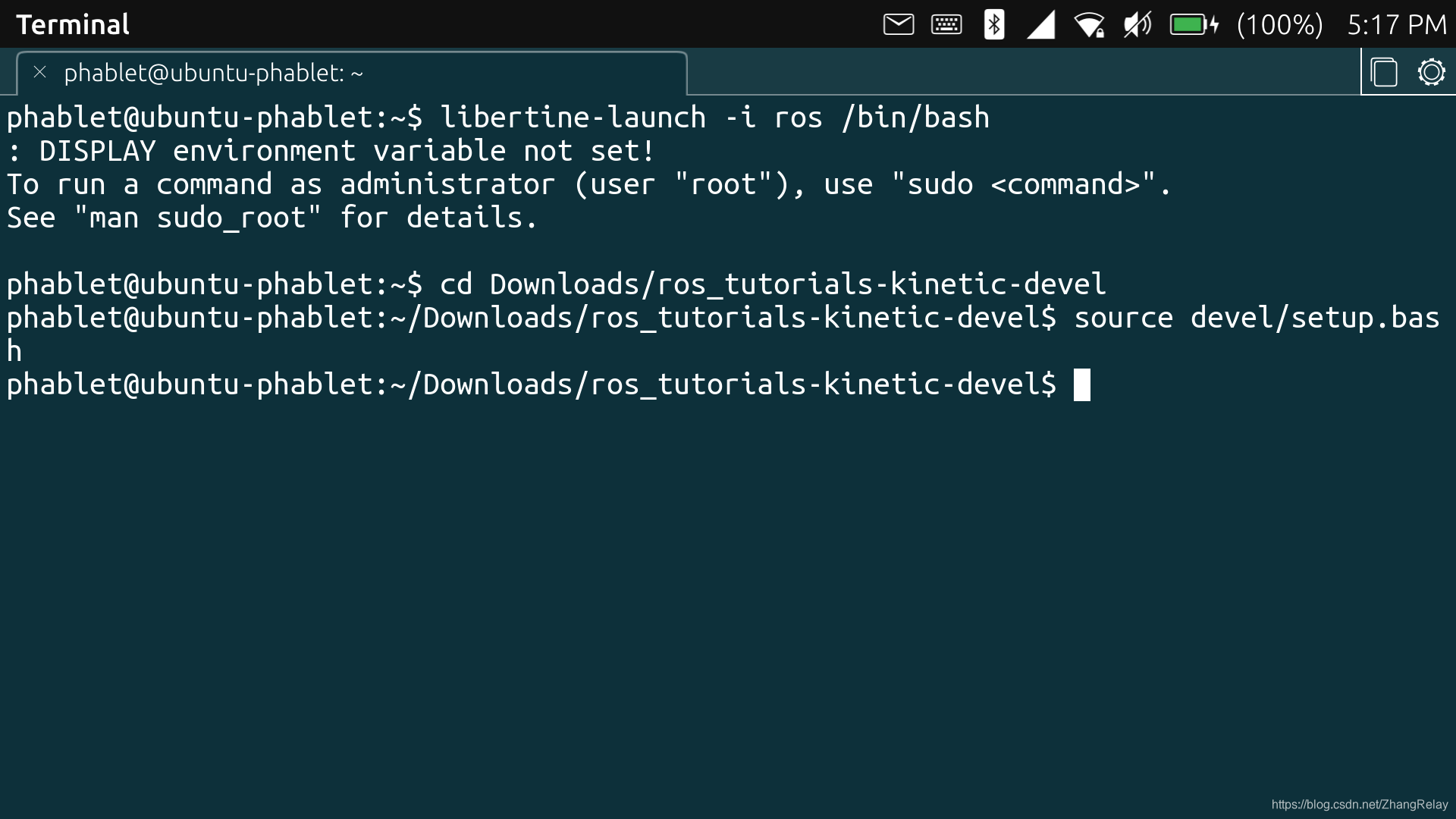
先导入工作区环境!
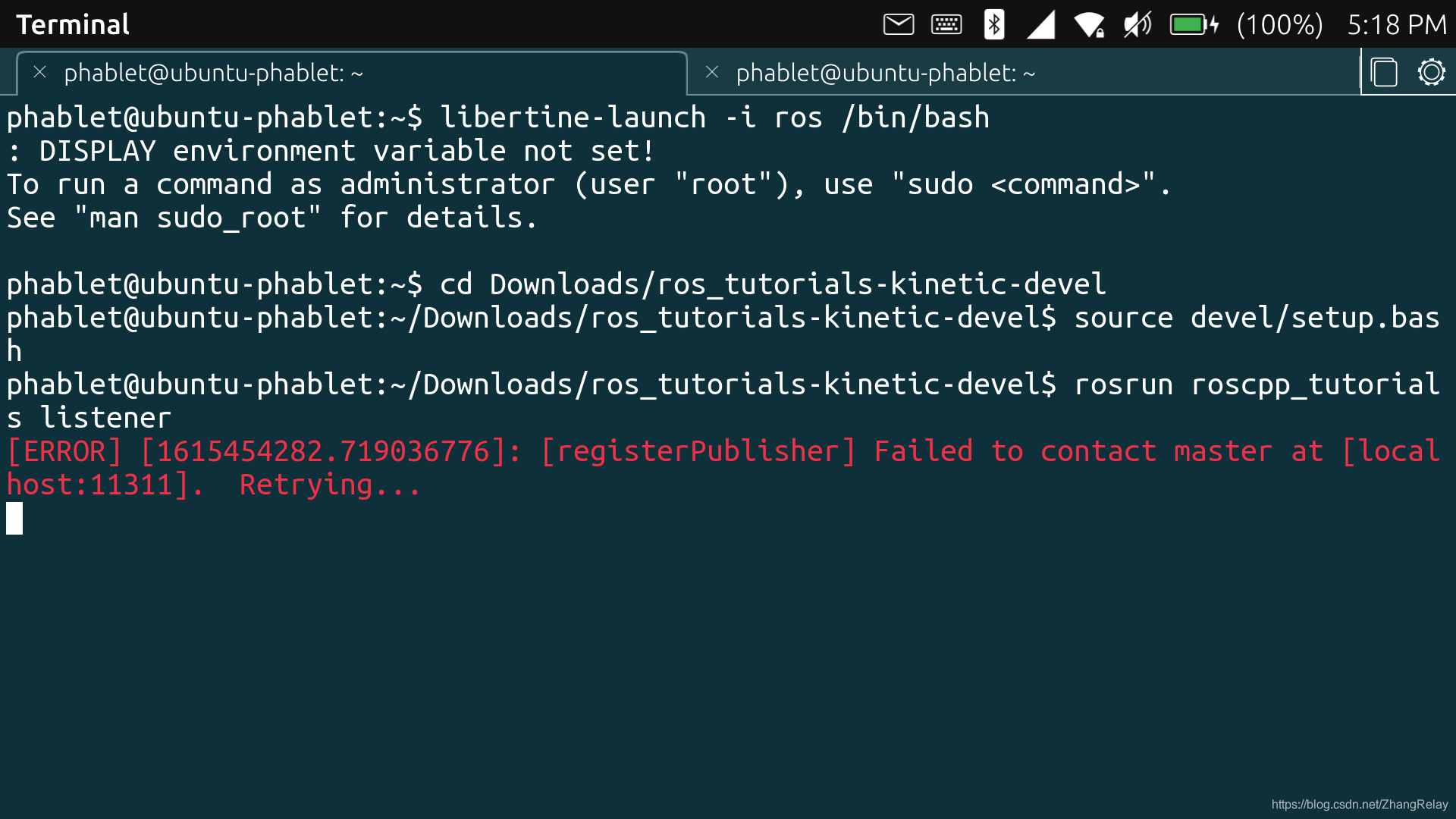
嗯,没有启动roscore,很久不用ros1了,ros2不用这一步哦!
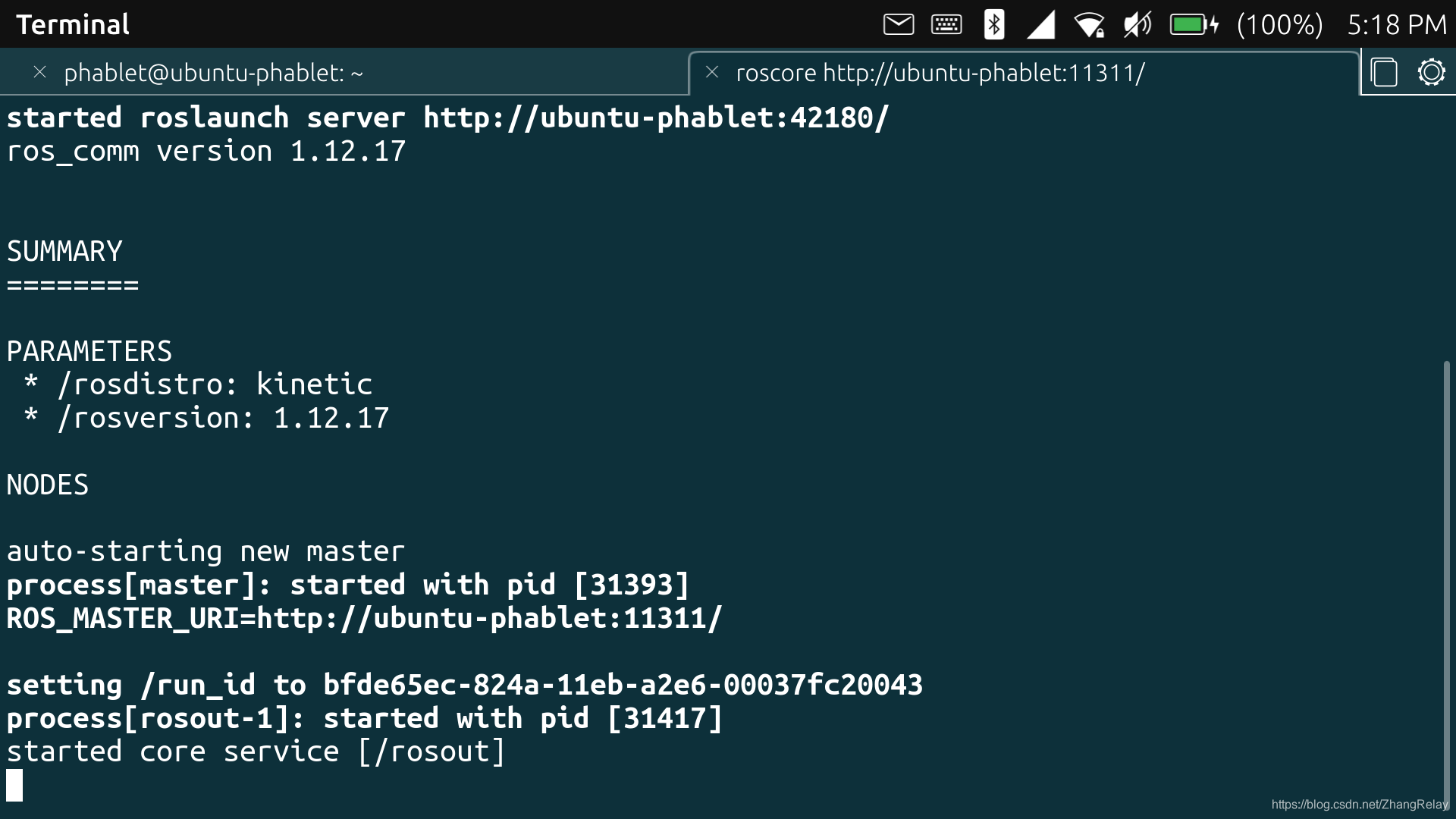
开启roscore
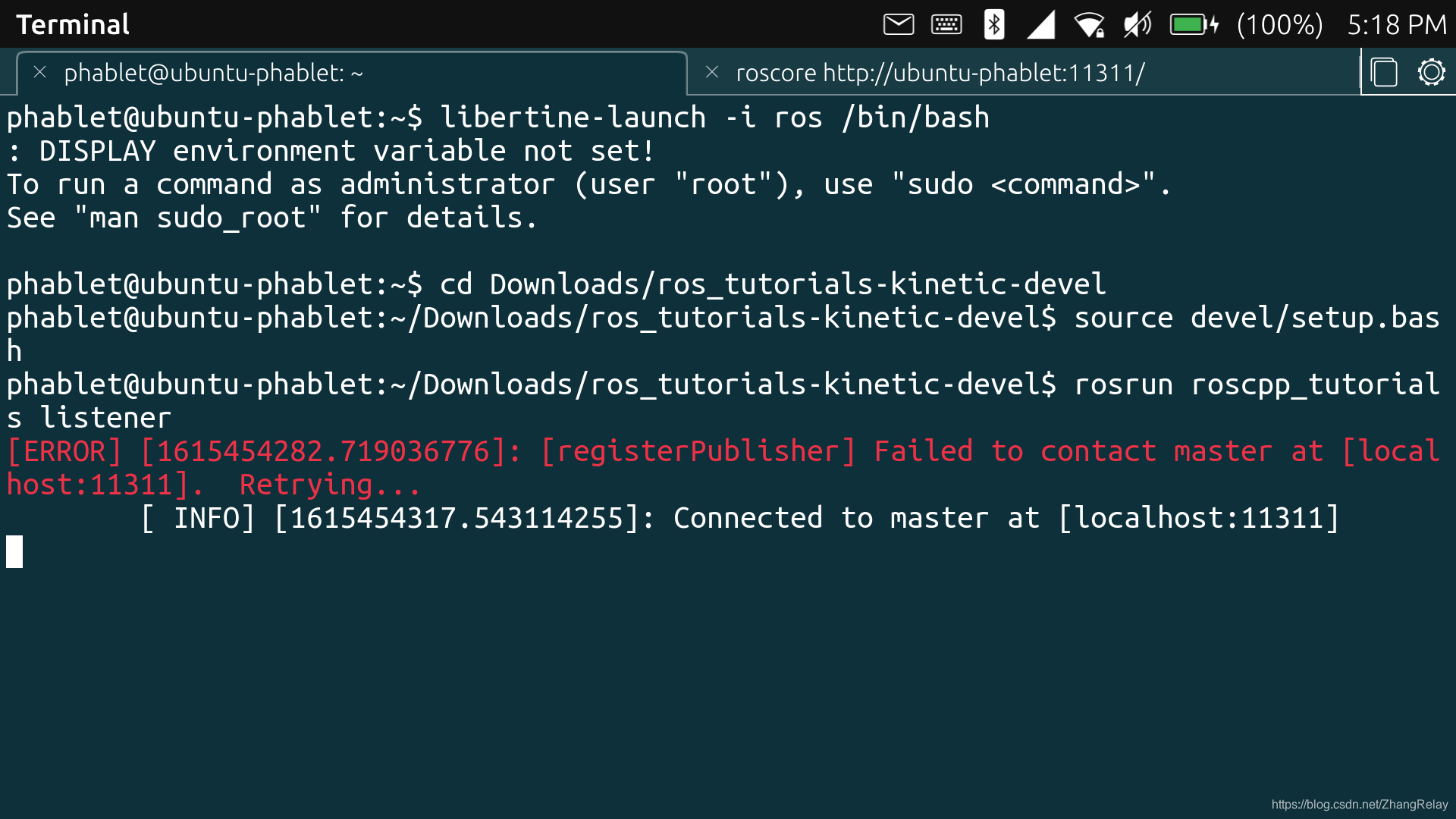
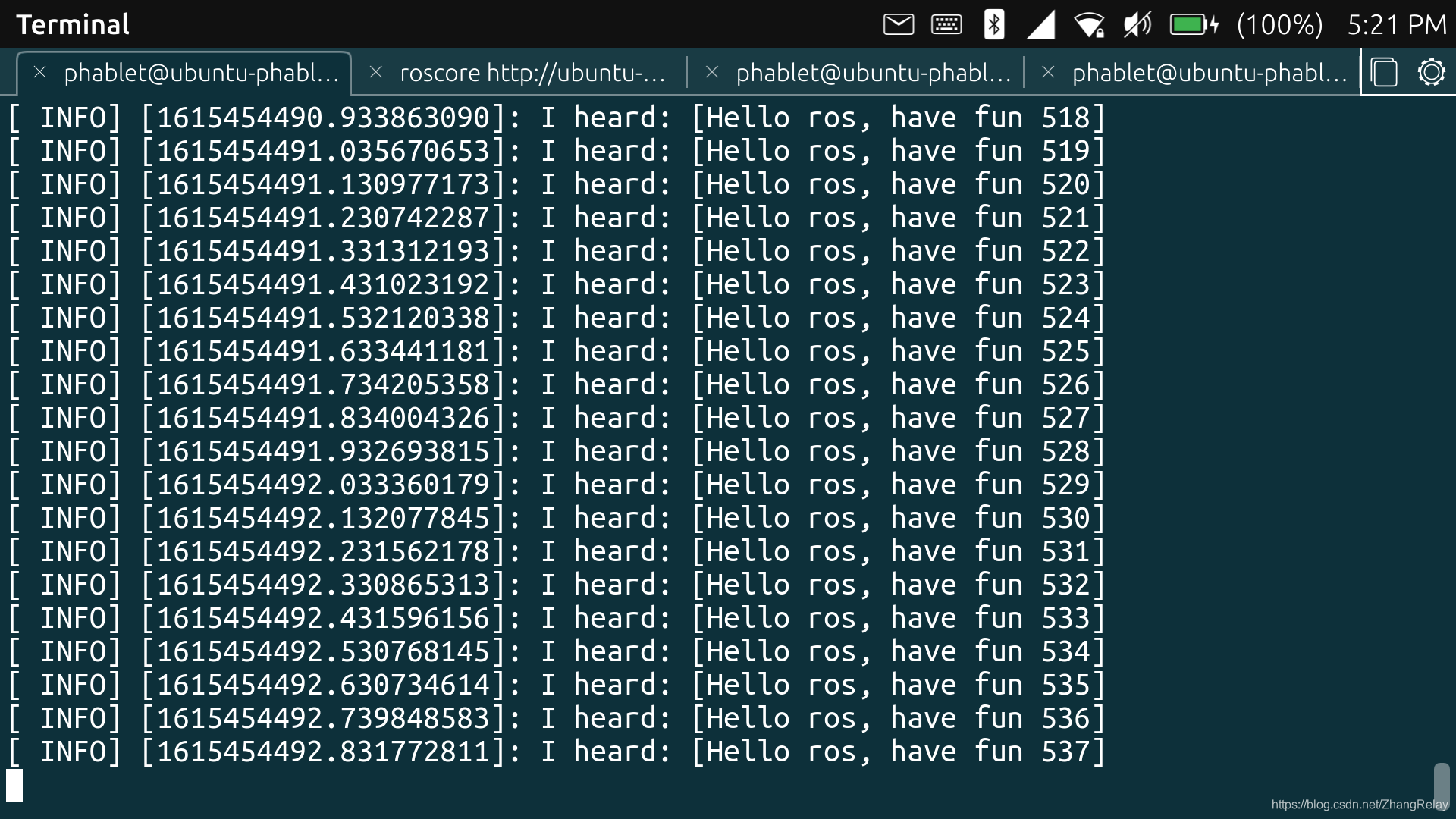
listener节点正常工作了!
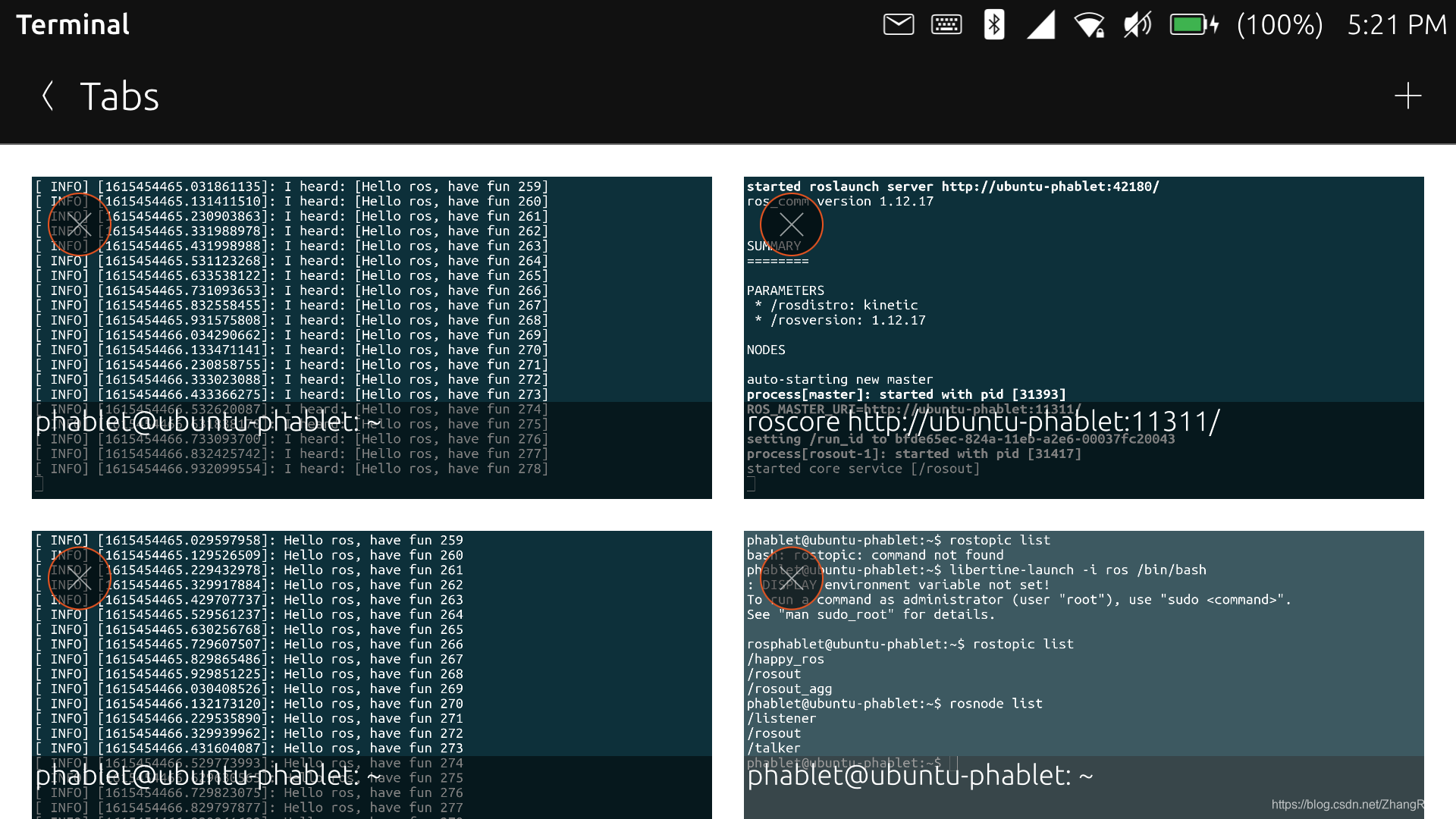
全部效果一览无遗啊!!!
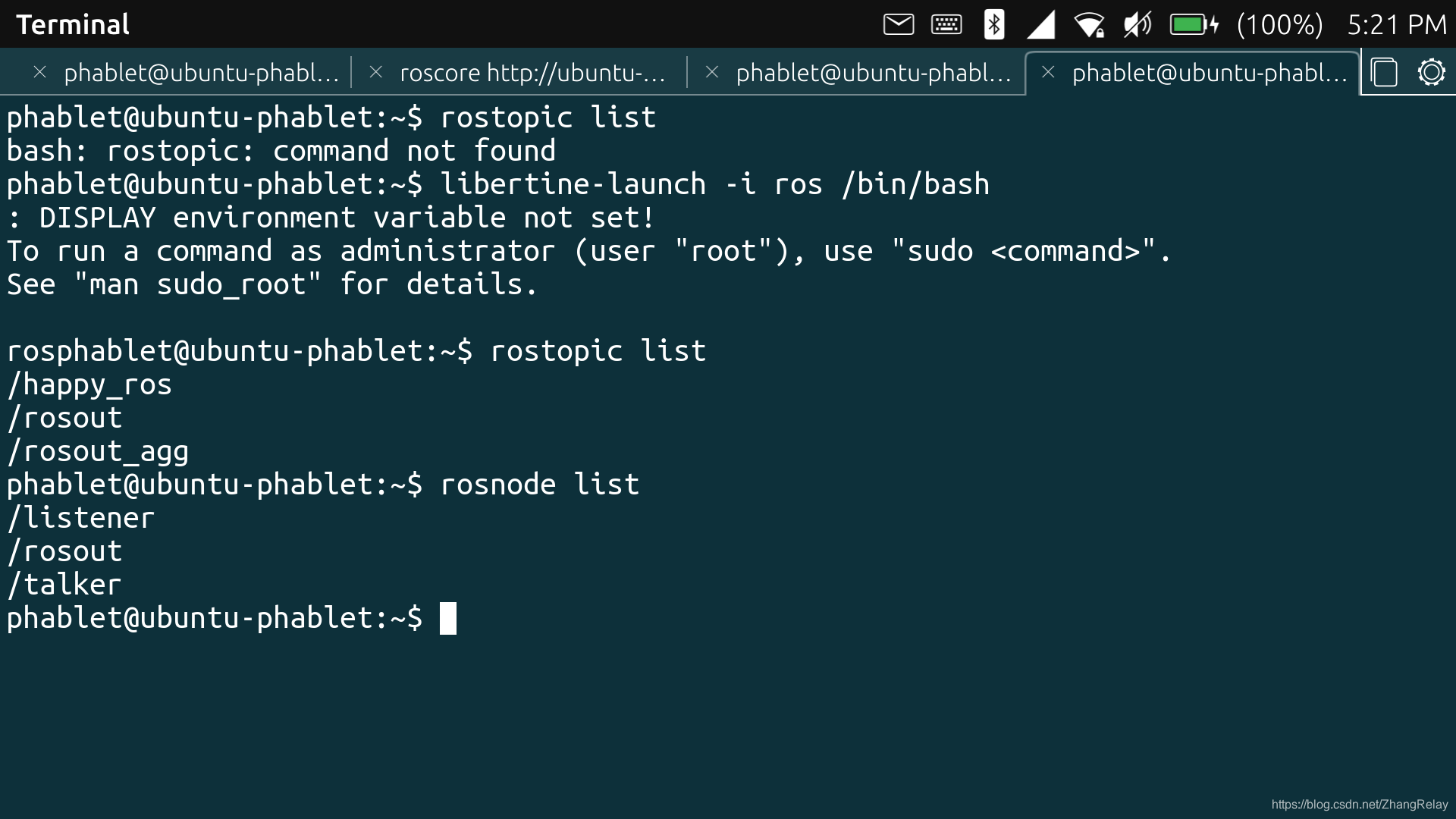
happy_ros
收!
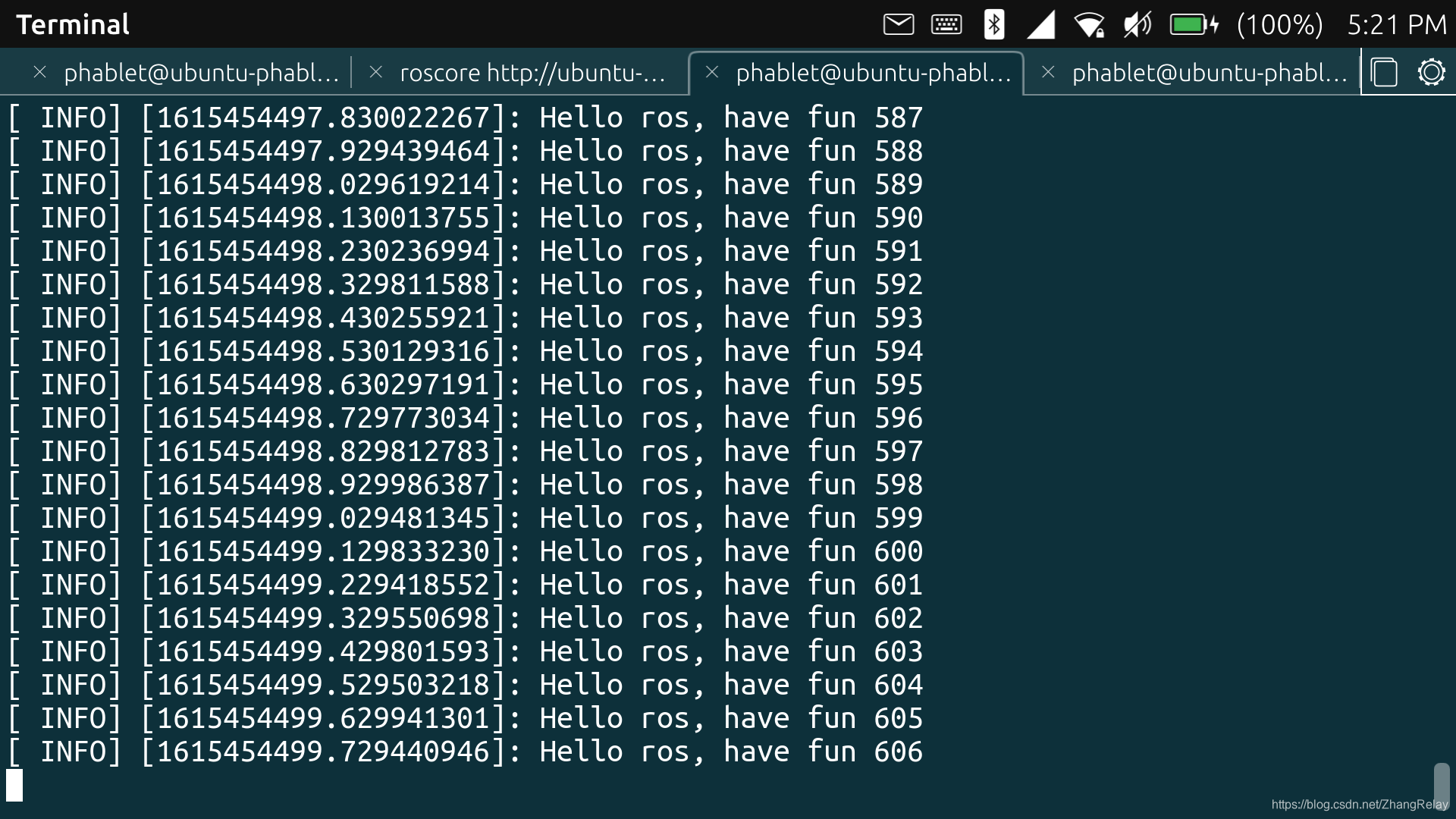
发
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/114675005

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)