机器人编程趣味实践02-程序(Hello World)

上一节,概述中(机器人编程趣味实践01-简要介绍)简要说明课程包含内容。
- 互联网
- 物联网
- 智联网(机器人)
开篇
这些设备平台的Hello World,具体有哪些差异呢???
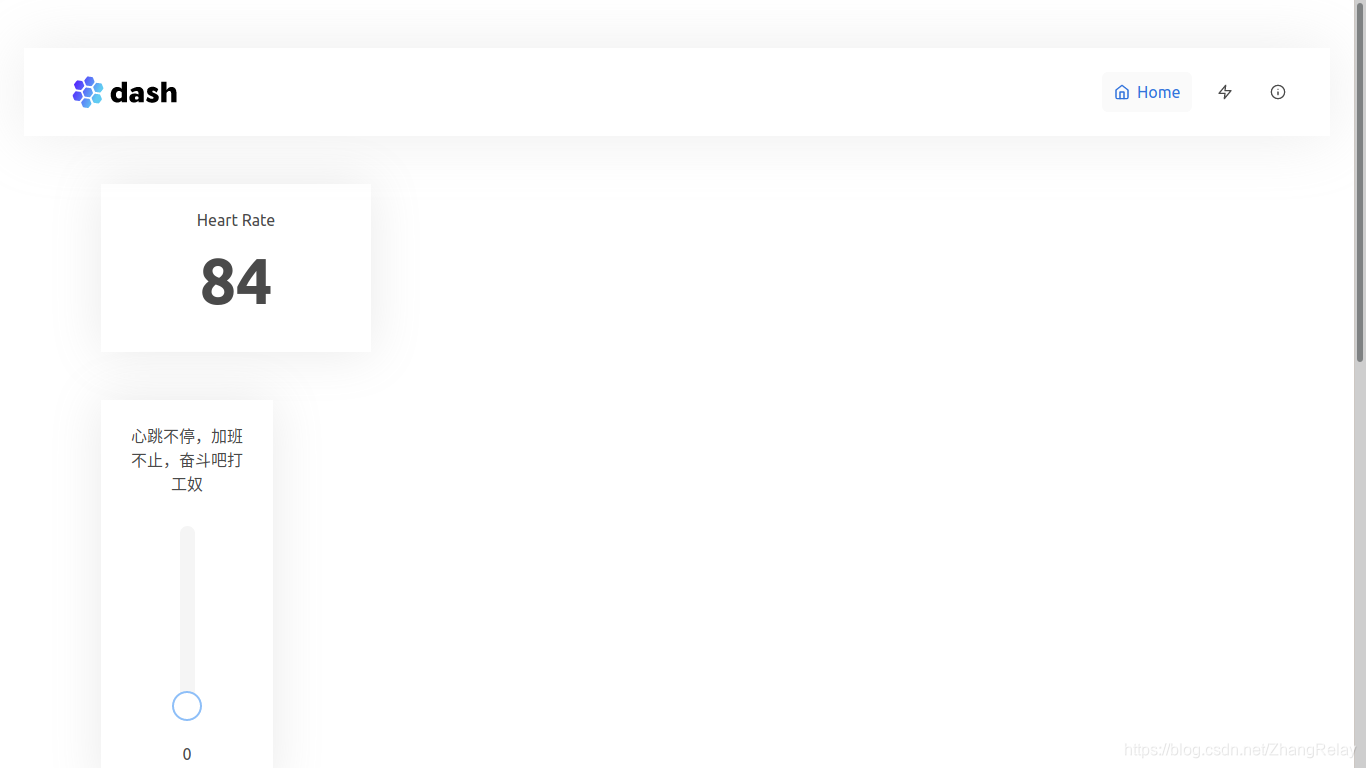
对于如上设备,它的Hello World,就是测心跳,然后发送可在网页显示,如何做到的?
起步
先从一段简单的程序讲起吧^_^
-
#include <iostream> //头文件
-
-
using namespace std; //名字空间
-
-
int main() //主函数
-
{
-
cout<<"终端最简单的文本显示"<<endl;
-
return 0;
-
}
这个程序适用于手机和电脑,编译后执行效果如下:
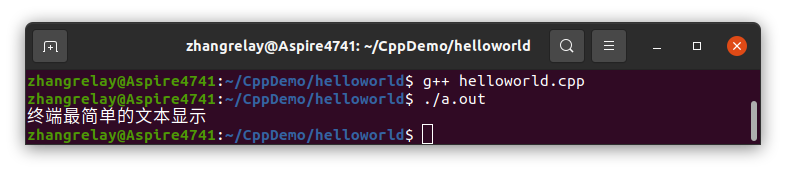
这个程序包含头文件、名字空间和主函数。
注意,在主函数中只有输出cout。这是所有代码学习最本原的基础,这个程序属于单机终端显示,最最简陋的人机交互,发布的是一个事先预定的消息。
它不属于
- 互联网程序
- 物联网程序
- 机器人程序
思考:
- 如何实现多台电脑之间信息交互?(互联网)
- 如何实现多台传感器设备之间数据共享?(物联网)
- 如何实现多台机器人之间行动协调?(机器人)

提示:
- 数据或信息(不一定是真实世界反映)
- 实际环境测量信息
- 基于环境信息完成任务或改变
人工智能等内容后续以案例形式补充
跃升
单向消息发布:
windows电脑发送Hello World给linux电脑,如下图所示:
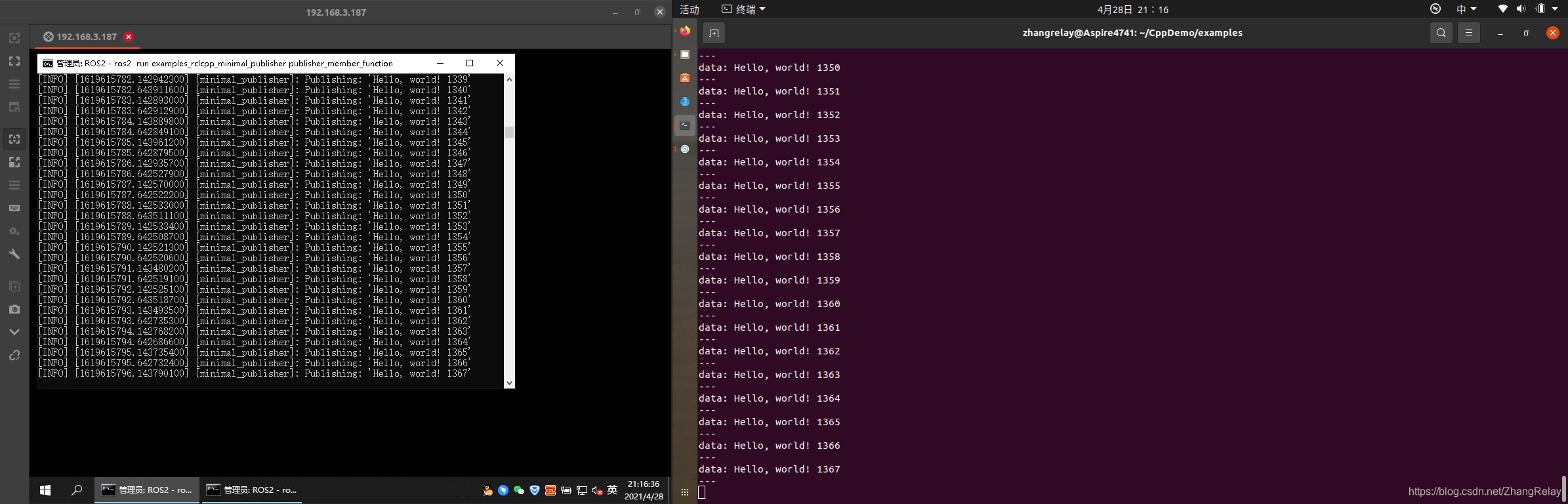
左侧为windows,右侧为linux,此为单向消息传送。
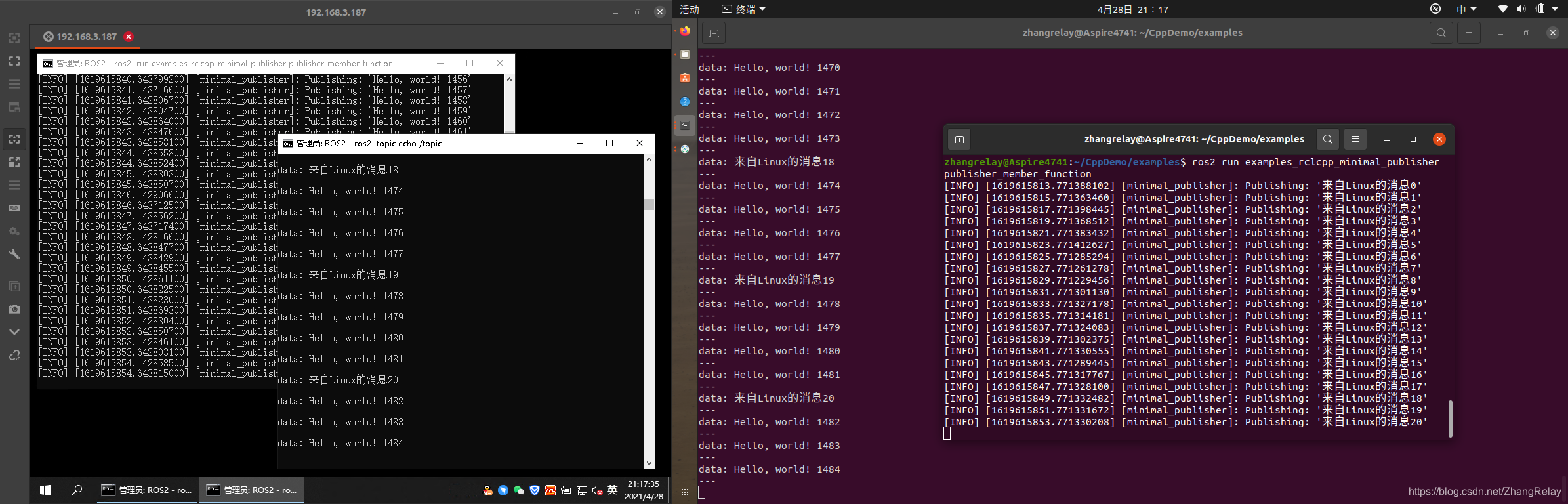
然后在linux端开启消息发布,windows端不仅能查看自己发布的消息,也能看到linux发布的消息。
通过这类工具外加一些图形化皮肤,可以制作局域网聊天工具,当然图片之类也可传送。
问题引出!
- 异步通信
- 同步通信
两台或多台电脑之间的时间如何同步呢???
如何实现实时的视频传送呢???
Linux端参考程序如下:
-
#include <chrono>
-
#include <functional>
-
#include <memory>
-
#include <string>
-
-
#include "rclcpp/rclcpp.hpp"
-
#include "std_msgs/msg/string.hpp"
-
-
using namespace std::chrono_literals;
-
-
class MinimalPublisher : public rclcpp::Node
-
{
-
public:
-
MinimalPublisher()
-
: Node("minimal_publisher"), count_(0)
-
{
-
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
-
timer_ = this->create_wall_timer(
-
2000ms, std::bind(&MinimalPublisher::timer_callback, this));
-
}
-
-
private:
-
void timer_callback()
-
{
-
auto message = std_msgs::msg::String();
-
message.data = "来自Linux的消息" + std::to_string(count_++);
-
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
-
publisher_->publish(message);
-
}
-
rclcpp::TimerBase::SharedPtr timer_;
-
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
-
size_t count_;
-
};
-
-
int main(int argc, char * argv[])
-
{
-
rclcpp::init(argc, argv);
-
rclcpp::spin(std::make_shared<MinimalPublisher>());
-
rclcpp::shutdown();
-
return 0;
-
}
对比一下,第一段程序,有很多类似的地方,但是复杂一些。这个案例发布的消息是键盘输入的字符。
回顾本文开始的那个案例,那是一个物联网消息案例,数据为心跳频率。
那么机器人程序Hello World如何编写???

限于篇幅,预知详情,参考如下链接:
总结
程序(Hello World)由单机发展到网络,表达形式也变得丰富多彩,对处理器和网络带宽的要求也显著提高。
- 从互联网的消息交流
- 到物联网的现实物体数字化
- 再到机器人与现实世界交互协作
- 虚拟和现实融合越来越紧密
这一切都源自与来自数字芯片所发出的:
Hello World
Hello World
Hello World
Hello World

-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/116241480

- 点赞
- 收藏
- 关注作者
评论(0)