机器人编程趣味实践01-简要介绍

【摘要】 历经6年打磨,5轮测试,机器人编程趣味实践将逐步更新。涵盖windows、linux双系统,涉及硬件平台有手表、手机、电脑和机器人等。
彩蛋---是虚拟现实或增强现实设备,有时间才会更新哦
从简单命令行交互开启:
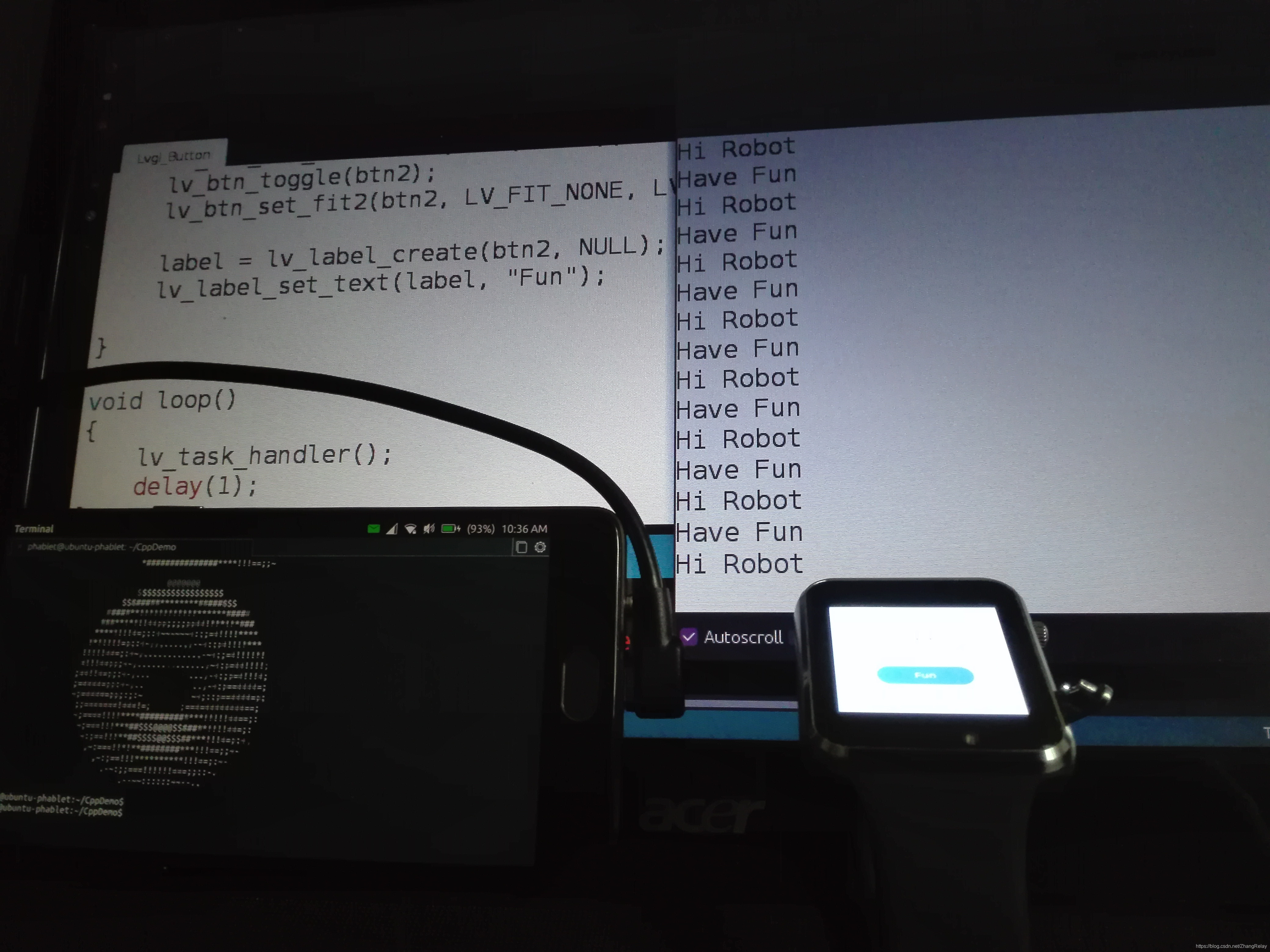
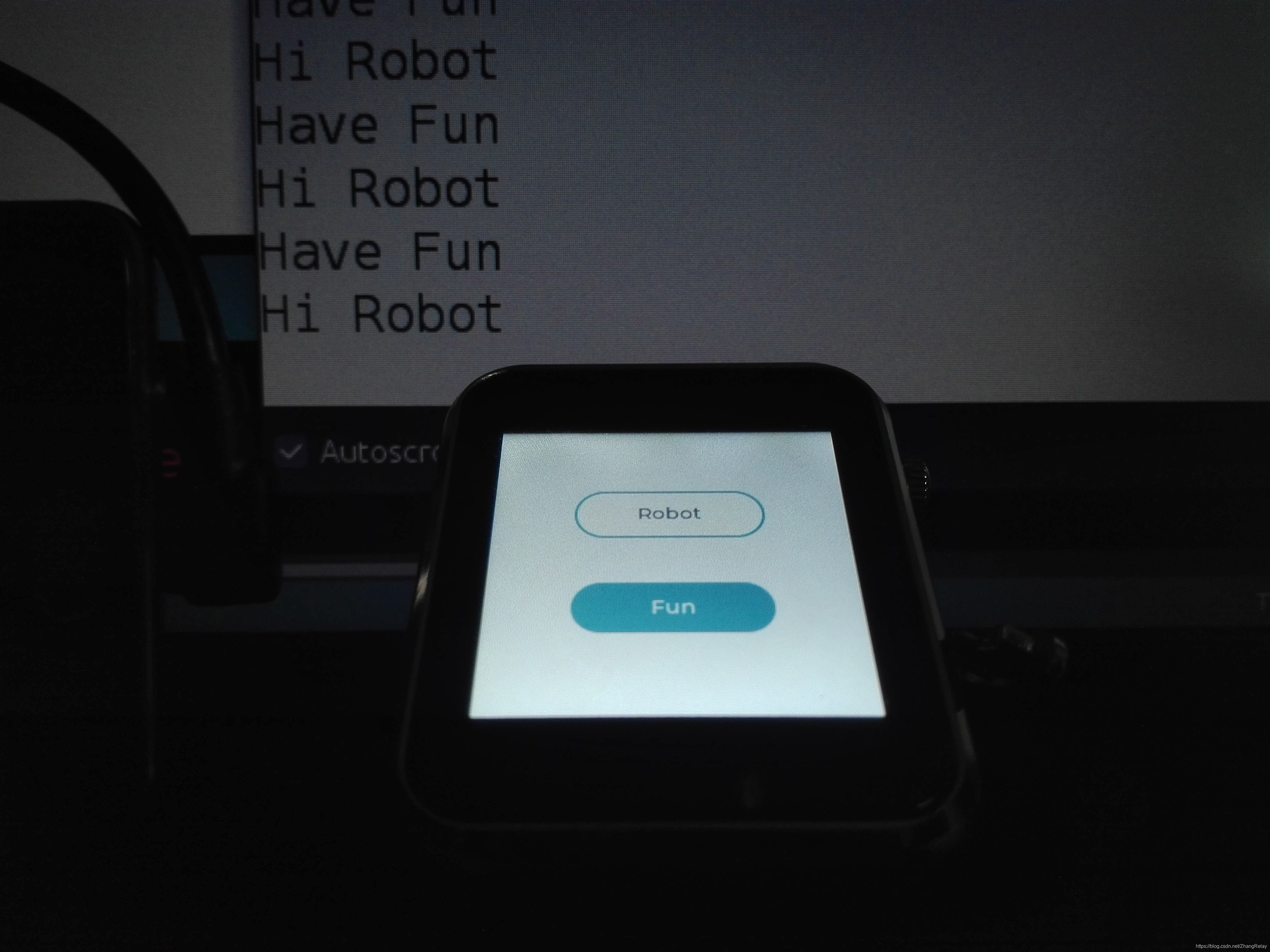
融合手表、手机和电脑,有终端到图形化界面:
网络涵盖无线wifi、串口serial等示例:
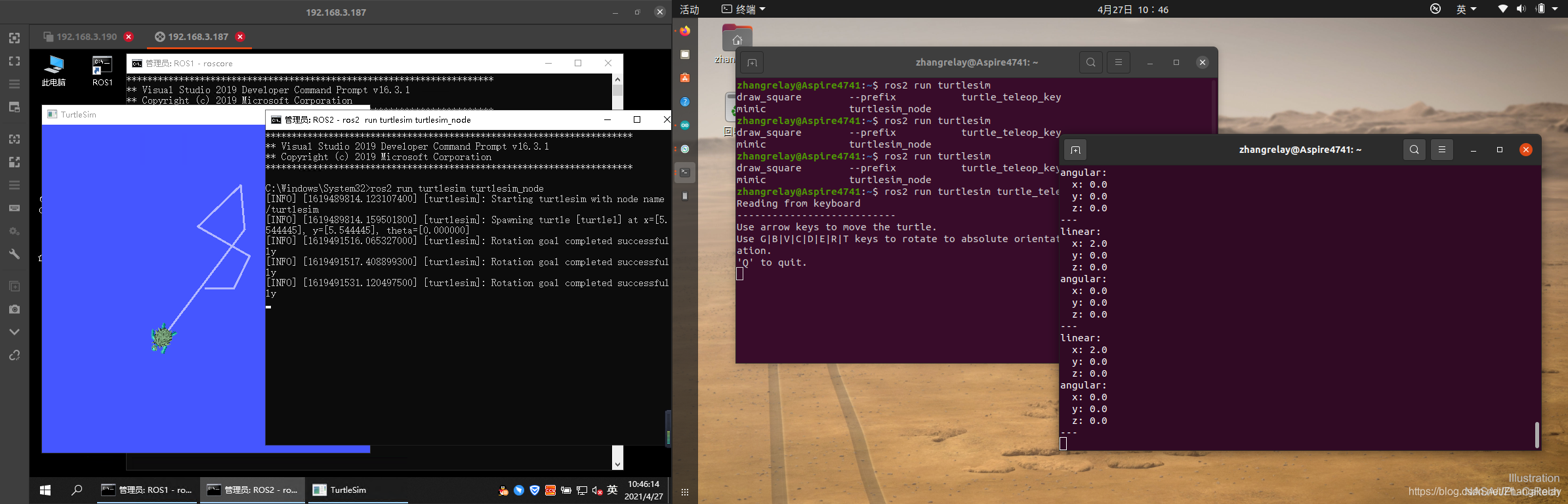
网络端多平台多终端互联互通:
所有案...
历经6年打磨,5轮测试,机器人编程趣味实践将逐步更新。涵盖windows、linux双系统,涉及硬件平台有手表、手机、电脑和机器人等。
- 彩蛋---是虚拟现实或增强现实设备,有时间才会更新哦
从简单命令行交互开启:
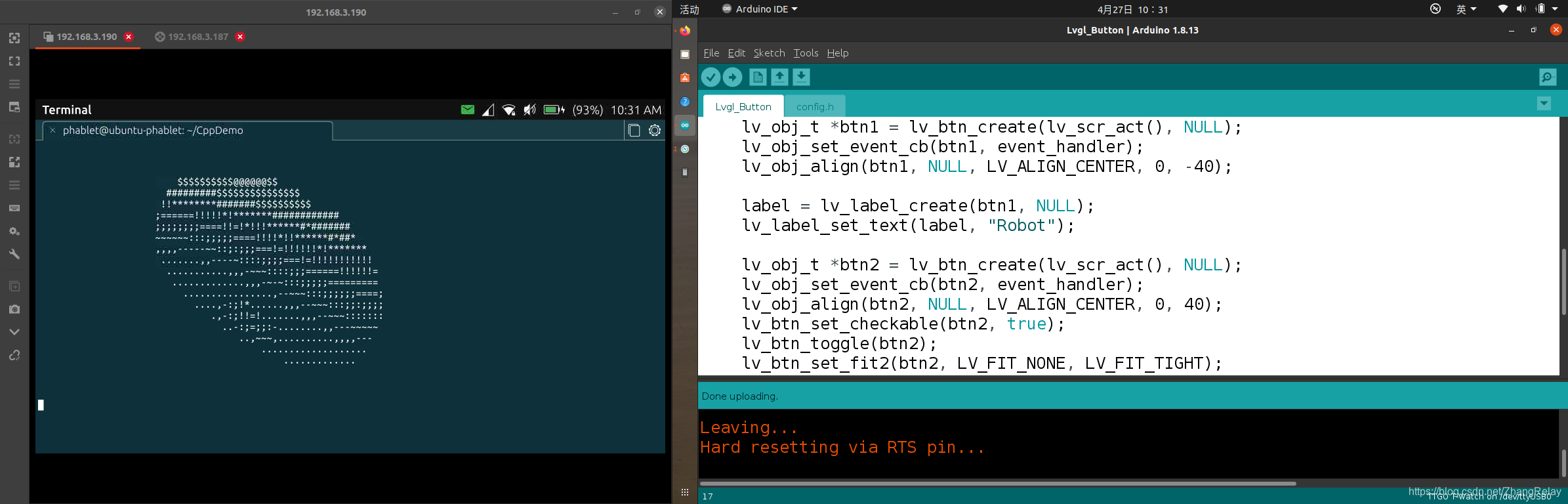
融合手表、手机和电脑,有终端到图形化界面:
网络涵盖无线wifi、串口serial等示例:
网络端多平台多终端互联互通:
所有案例都可靠运行。案例涉及的代码或算法会详细讲解,配图之下都会给出相应知识点和脉络的具体链接,供有兴趣的朋友查阅。
部分内容会制作视频,嵌入到博客中。
上面图中涉及代码细节如:
- 动态甜甜圈:https://blog.csdn.net/ZhangRelay/article/details/109863427
- 小乌龟画线:https://blog.csdn.net/ZhangRelay/article/details/98754130
全部课程内容测试修正后,会发布镜像方便直接使用,关于镜像往事如下:
- 机器人实践:https://blog.csdn.net/ZhangRelay/article/details/103868465
- 控制理论案例:https://zhangrelay.blog.csdn.net/article/details/114101789
知识脉络点起源:
此文中手表的arduino代码如下(选用ESP32核心):
国产芯片,并且是青少年机器人等级考试官方指定教材所用核心
相关内容详细介绍:https://blog.csdn.net/ZhangRelay/article/details/115909178
主要软硬件平台为arduino+ESP32!
可见一段C++程序必然包含,头文件、注释、变量、初始化和主函数等,详细细节下一节具体介绍。
头文件.h
-
// => Hardware select
-
// #define LILYGO_WATCH_2019_WITH_TOUCH // To use T-Watch2019 with touchscreen, please uncomment this line
-
// #define LILYGO_WATCH_2019_NO_TOUCH // To use T-Watch2019 Not touchscreen , please uncomment this line
-
#define LILYGO_WATCH_2020_V1 //To use T-Watch2020, please uncomment this line
-
// #define LILYGO_WATCH_2020_V2 //To use T-Watch2020 V2, please uncomment this line
-
// #define LILYGO_WATCH_2020_V3 //To use T-Watch2020 V3, please uncomment this line
-
-
-
// NOT SUPPORT ...
-
#define LILYGO_WATCH_BLOCK
-
// NOT SUPPORT ...
-
-
// => Function select
-
#define LILYGO_WATCH_LVGL //To use LVGL, you need to enable the macro LVGL
-
-
#include <LilyGoWatch.h>
-
主代码.c
-
-
#include "config.h"
-
-
TTGOClass *ttgo;
-
-
static void event_handler(lv_obj_t *obj, lv_event_t event)
-
{
-
if (event == LV_EVENT_CLICKED) {
-
Serial.printf("Hi Robot\n");
-
} else if (event == LV_EVENT_VALUE_CHANGED) {
-
Serial.printf("Have Fun\n");
-
}
-
}
-
-
void setup()
-
{
-
Serial.begin(19200);
-
ttgo = TTGOClass::getWatch();
-
ttgo->begin();
-
ttgo->openBL();
-
ttgo->lvgl_begin();
-
-
lv_obj_t *label;
-
-
lv_obj_t *btn1 = lv_btn_create(lv_scr_act(), NULL);
-
lv_obj_set_event_cb(btn1, event_handler);
-
lv_obj_align(btn1, NULL, LV_ALIGN_CENTER, 0, -40);
-
-
label = lv_label_create(btn1, NULL);
-
lv_label_set_text(label, "Robot");
-
-
lv_obj_t *btn2 = lv_btn_create(lv_scr_act(), NULL);
-
lv_obj_set_event_cb(btn2, event_handler);
-
lv_obj_align(btn2, NULL, LV_ALIGN_CENTER, 0, 40);
-
lv_btn_set_checkable(btn2, true);
-
lv_btn_toggle(btn2);
-
lv_btn_set_fit2(btn2, LV_FIT_NONE, LV_FIT_TIGHT);
-
-
label = lv_label_create(btn2, NULL);
-
lv_label_set_text(label, "Fun");
-
-
}
-
-
void loop()
-
{
-
lv_task_handler();
-
delay(1);
-
}
-End-
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/116194554

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)