机器人编程趣味实践10-做个任务(行动)

这是ROS2中比服务更为复杂的基础模块。
白话一下:一个行动,可以时刻汇报进展,无法完成时可以变更或者取消,完成后会告知
- Mission completed!
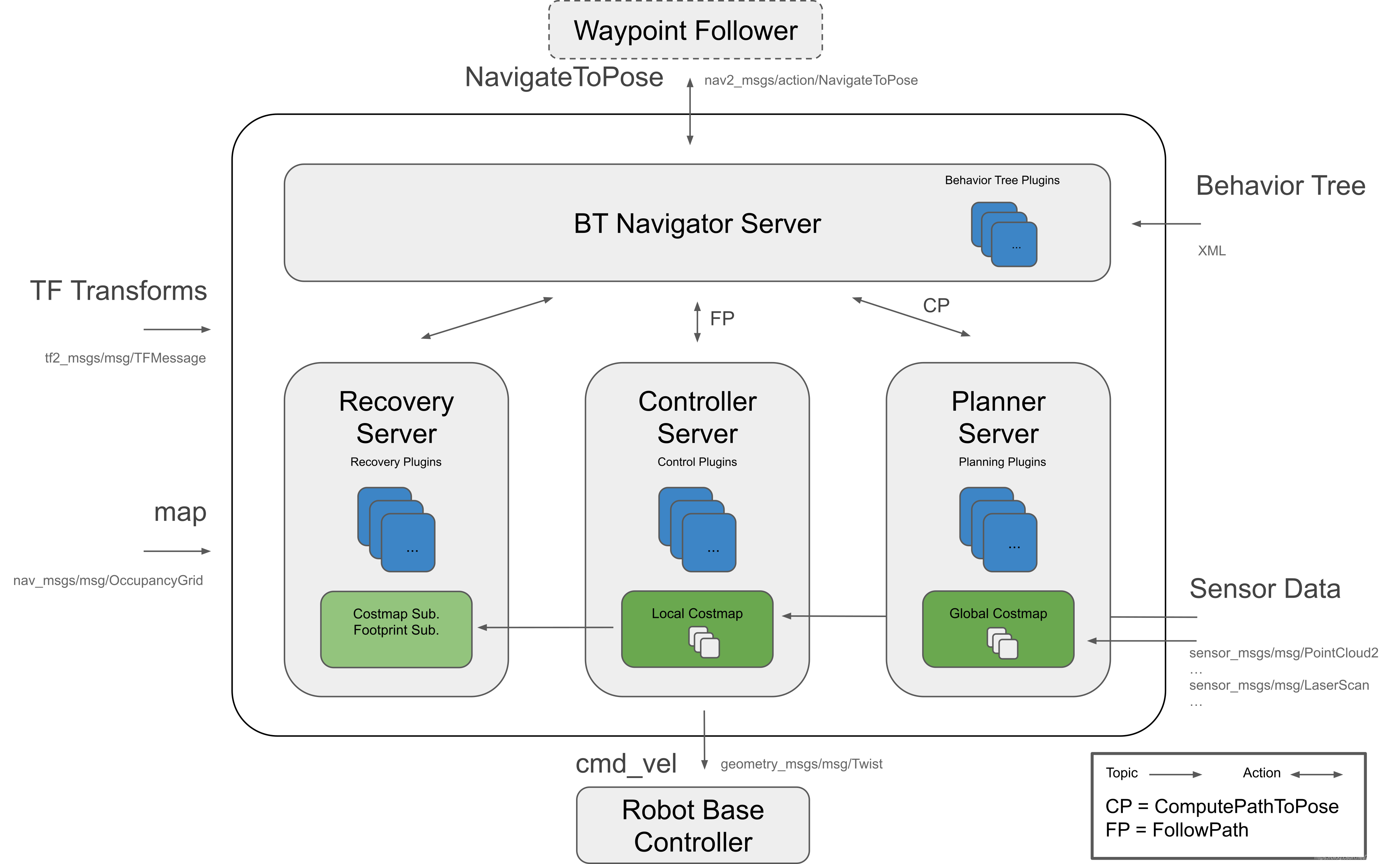
具体应用案例,如导航行为树
这个后续细说,现在先从简单的入手吧。
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
本节目标通过基础案例掌握ROS2内部行动的基本使用。
预备知识
行动是 ROS 2 中的又一种通信类型,用于长时间运行的任务,由三部分组成:目标、反馈和结果。行动建立在主题和服务上。 它们的功能类似于服务,但可以取消,还提供稳定的反馈,而不同于返回单一响应的服务。行动同样使用客户端-服务器模型,类似于发布者-订阅者模型(在主题教程中进行了描述)。 “行动客户端”节点向“动作服务器”节点发送目标,该节点确认目标并返回反馈过程流和结果。
功能包要点
- ros2基础包
- turtlesim包
- source
实践
1 配置
运行如下两个节点 /turtlesim 和 /teleop_turtle :
ros2 run turtlesim turtlesim_node- ros2 run turtlesim turtle_teleop_key
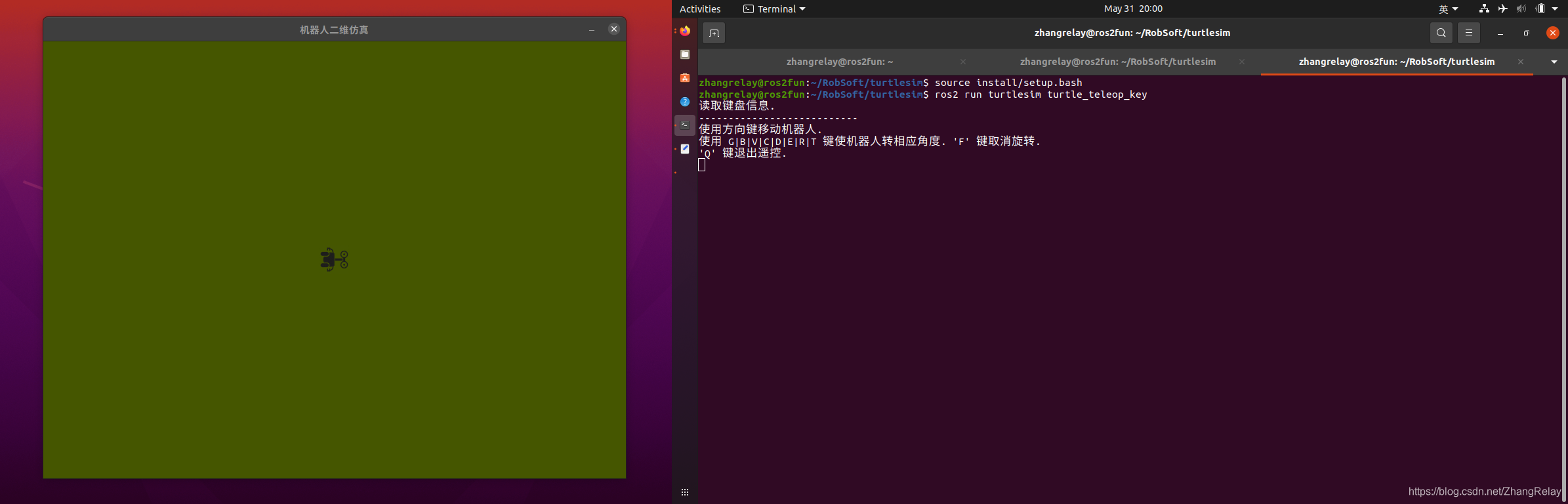
2 基础使用
可以看到右侧启动/teleop_turtle节点后,终端显示如下:
使用方向键移动机器人.
使用 G|B|V|C|D|E|R|T 键使机器人转相应角度. 'F' 键取消旋转.
让我们专注于第二行,它对应于一个行动。 (第一条指令对应于“cmd_vel”主题,之前在主题教程中讨论过。)请注意,字母键 G|B|V|C|D|E|R|T 在美国 QWERTY 键盘上的 F 键周围形成一个“框”。 F 周围的每个键的位置对应于turtlesim 中的方向。 例如,E 会将海龟的方向旋转到左上角。
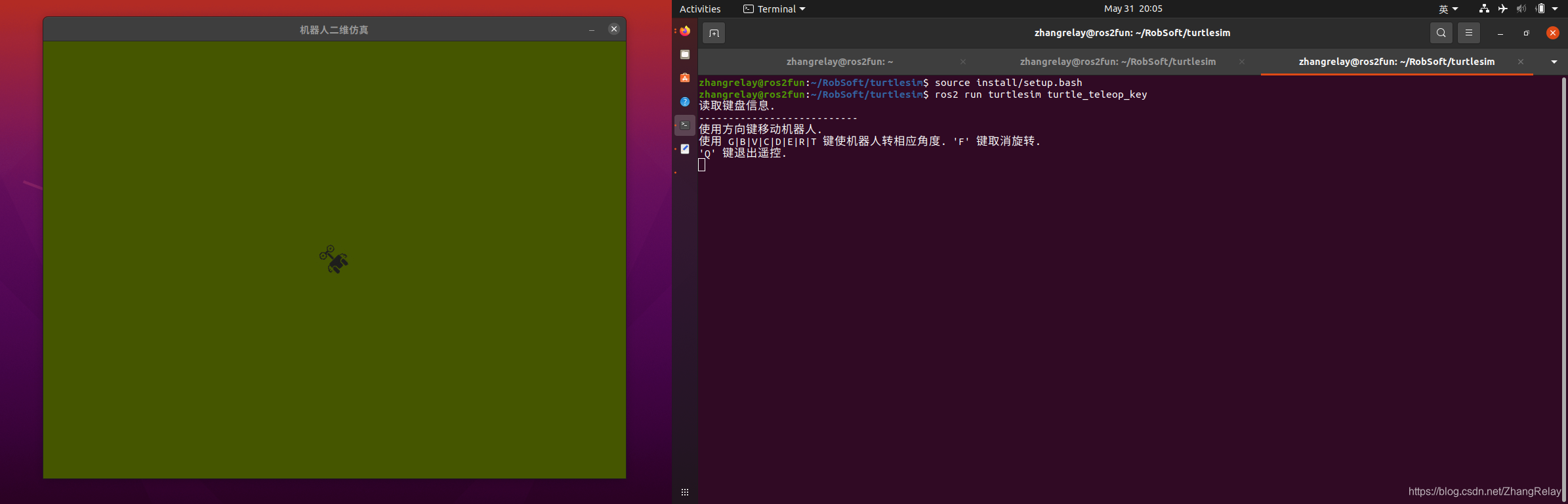
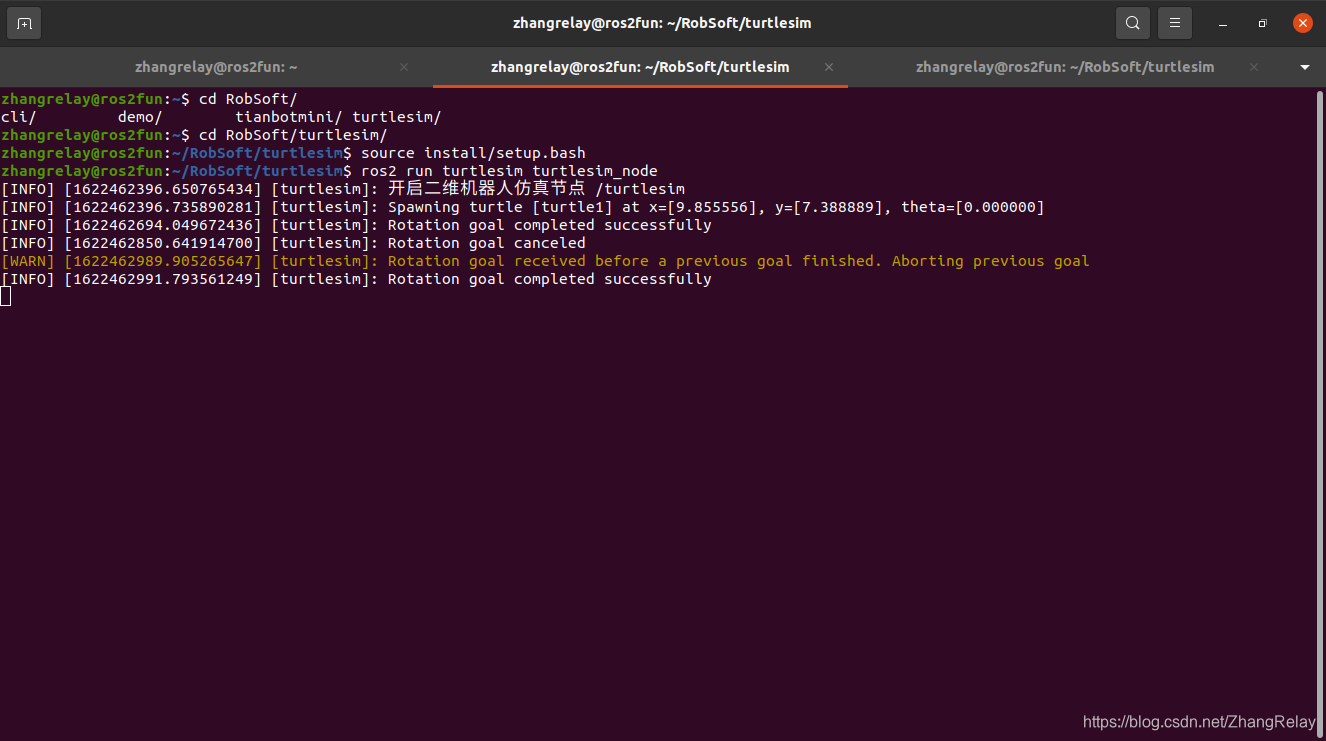
注意 /turtlesim 节点运行的终端。 每次按下其中一个键时,都会向作为 /turtlesim 节点一部分的动作服务器发送一个目标。 目标是旋转乌龟以使其朝向特定方向。 乌龟完成旋转后,应显示一条中继目标结果的消息:
[INFO] [1622462396.650765434] [turtlesim]: 开启二维机器人仿真节点 /turtlesim
[INFO] [1622462396.735890281] [turtlesim]: Spawning turtle [turtle1] at x=[9.855556], y=[7.388889], theta=[0.000000]
[INFO] [1622462694.049672436] [turtlesim]: Rotation goal completed successfully
如上对应:
-
if (fabs(normalizeAngle(static_cast<float>(orient_) - theta)) < 0.02)
-
{
-
RCLCPP_INFO(nh_->get_logger(), "Rotation goal completed successfully");
-
rotate_absolute_goal_handle_->succeed(rotate_absolute_result_);
-
rotate_absolute_goal_handle_ = nullptr;
-
lin_vel_x_ = 0.0;
-
lin_vel_y_ = 0.0;
-
ang_vel_ = 0.0;
-
}
F 键将在执行过程中取消目标。
尝试按 B 键,然后在海龟完成旋转之前按 F 键。 在运行 /turtlesim 节点的终端中,将看到以下消息:
[INFO] [1622462850.641914700] [turtlesim]: Rotation goal canceled
如上对应:
-
if (rotate_absolute_goal_handle_->is_canceling())
-
{
-
RCLCPP_INFO(nh_->get_logger(), "Rotation goal canceled");
-
rotate_absolute_goal_handle_->canceled(rotate_absolute_result_);
-
rotate_absolute_goal_handle_ = nullptr;
-
lin_vel_x_ = 0.0;
-
lin_vel_y_ = 0.0;
-
ang_vel_ = 0.0;
-
}
客户端(在Teleop中的输入)不仅可以停止目标,而且服务器端(/turtlesim节点)也可以停止目标。 当服务器端选择停止处理一个目标时,称为“中止”该目标。 尝试按 D 键,然后在旋转完成之前按 G 键。 在运行 /turtlesim 节点的终端中,将看到以下消息:
[WARN] [1622462989.905265647] [turtlesim]: Rotation goal received before a previous goal finished. Aborting previous goal
如上对应:
-
void Turtle::rotateAbsoluteAcceptCallback(const std::shared_ptr<RotateAbsoluteGoalHandle> goal_handle)
-
{
-
// Abort any existing goal
-
if (rotate_absolute_goal_handle_)
-
{
-
RCLCPP_WARN(nh_->get_logger(), "Rotation goal received before a previous goal finished. Aborting previous goal");
-
rotate_absolute_goal_handle_->abort(rotate_absolute_result_);
-
}
-
rotate_absolute_goal_handle_ = goal_handle;
-
rotate_absolute_feedback_.reset(new turtlesim::action::RotateAbsolute::Feedback);
-
rotate_absolute_result_.reset(new turtlesim::action::RotateAbsolute::Result);
-
rotate_absolute_start_orient_ = orient_;
-
}
该行动服务器选择中止第一个目标,因为有了新目标。 可以选择其他目标,例如拒绝新目标或在第一个目标完成后执行第二个目标。 不要假设每个行动服务器在获得新目标时都会选择中止当前目标。
3 节点信息
/turtlesim
- Action Servers:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
-
zhangrelay@ros2fun:~/RobSoft/turtlesim$ ros2 node info /turtlesim
-
/turtlesim
-
Subscribers:
-
/parameter_events: rcl_interfaces/msg/ParameterEvent
-
/turtle1/cmd_vel: geometry_msgs/msg/Twist
-
Publishers:
-
/parameter_events: rcl_interfaces/msg/ParameterEvent
-
/rosout: rcl_interfaces/msg/Log
-
/turtle1/color_sensor: turtlesim/msg/Color
-
/turtle1/pose: turtlesim/msg/Pose
-
Service Servers:
-
/clear: std_srvs/srv/Empty
-
/kill: turtlesim/srv/Kill
-
/reset: std_srvs/srv/Empty
-
/spawn: turtlesim/srv/Spawn
-
/turtle1/set_pen: turtlesim/srv/SetPen
-
/turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute
-
/turtle1/teleport_relative: turtlesim/srv/TeleportRelative
-
/turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters
-
/turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
-
/turtlesim/get_parameters: rcl_interfaces/srv/GetParameters
-
/turtlesim/list_parameters: rcl_interfaces/srv/ListParameters
-
/turtlesim/set_parameters: rcl_interfaces/srv/SetParameters
-
/turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
-
Service Clients:
-
-
Action Servers:
-
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
-
Action Clients:
/teleop_turtle
- Action Clients:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
-
zhangrelay@ros2fun:~/RobSoft/turtlesim$ ros2 node info /teleop_turtle
-
/teleop_turtle
-
Subscribers:
-
/parameter_events: rcl_interfaces/msg/ParameterEvent
-
Publishers:
-
/parameter_events: rcl_interfaces/msg/ParameterEvent
-
/rosout: rcl_interfaces/msg/Log
-
/turtle1/cmd_vel: geometry_msgs/msg/Twist
-
Service Servers:
-
/teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters
-
/teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
-
/teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters
-
/teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters
-
/teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters
-
/teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
-
Service Clients:
-
-
Action Servers:
-
-
Action Clients:
-
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
4 行动列表
- ros2 action list
显示如下:
/turtle1/rotate_absolute
- ros2 action list -t
显示如下:
/turtle1/rotate_absolute [turtlesim/action/RotateAbsolute]
5 行动信息
- ros2 action info /turtle1/rotate_absolute
显示结果如下:
Action: /turtle1/rotate_absolute
Action clients: 1
/teleop_turtle
Action servers: 1
/turtlesim
6 行动接口消息
- ros2 interface show turtlesim/action/RotateAbsolute
显示如下:
# The desired heading in radians
float32 theta
---
# The angular displacement in radians to the starting position
float32 delta
---
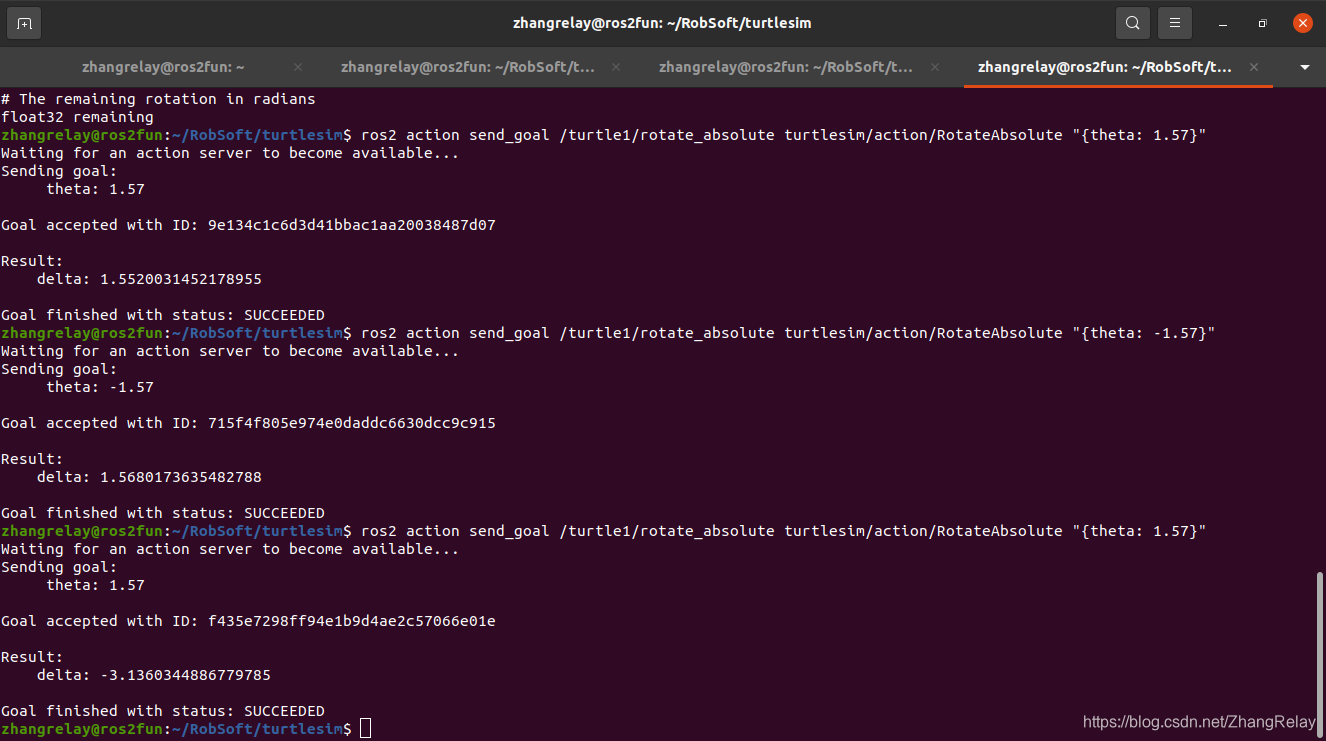
# The remaining rotation in radians
float32 remaining
7 发送目标
通用格式:
ros2 action send_goal <action_name> <action_type> <values>
具体应用:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
显示结果如下:
Waiting for an action server to become available...
Sending goal:
theta: 1.57Goal accepted with ID: 9e134c1c6d3d41bbac1aa20038487d07
Result:
delta: 1.5520031452178955Goal finished with status: SUCCEEDED
注意,误差大约0.02。可以修改机器人PID转向提高精度留作思考题。
当然控制周期也可以好好研究一下哦^_^
如果需要看过程:
-
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 0.0}" --feedback
-
Waiting for an action server to become available...
-
Sending goal:
-
theta: 0.0
-
-
Feedback:
-
remaining: -0.10079997777938843
-
-
Goal accepted with ID: e06e9a8bc25345e18ace2a0fdaa55b80
-
-
Feedback:
-
remaining: -0.09919998049736023
-
-
....
-
-
Feedback:
-
remaining: -0.0016000281320884824
-
-
Result:
-
delta: 0.09919995069503784
-
-
Goal finished with status: SUCCEEDED
总结
行动类似服务,允许执行长时间运行的任务、提供定时反馈并且可以取消。
机器人系统可能会使用行动进行导航。 动作目标可以告诉机器人行进到一个位置。 机器人导航到该位置时,可以沿途发送更新(即反馈),一旦到达目的地,它就会发送最终结果消息。
turtlesim 有一个行动服务器,行动客户端可以将目标发送到旋转机器人。 在本教程中,学习行动 /turtle1/rotate_absolute,更好了解什么是行动以及它们如何工作。
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/117426986

- 点赞
- 收藏
- 关注作者
评论(0)