霍夫变换直线检测理解

一步一步来:
1、在白纸上画出一个直角坐标系,任意给出一个点;
2、那么,对于点(x0,y0),经过这个点的直线必定满足y0=k*x0+b,其中k是直线的斜率,b是直线的截距;
3、上式可以化成b=y0-k*x0, 可以看作是以-x0为斜率,以y0为截距,在k-b空间上的一个直线方程(k,b为变量);
4、可见,k-b空间上的一条直线,代表了x-y空间经过特定点的所有直线,而x-y上的特定直线责备k-b空间上的特定点表示;
利用这个原理,我们可以通过一下方法检测可能出线的直线:
1、得到一副边缘图像;
2、对图像中的每一个边缘点,在k-b空间中画出一条直线;
3、在各直线的交点,我们采取“投票”(vote)的方法,即累加:n条直线的交点,改点的值为n;
4、遍历k-b空间,寻找出先局部最大值(极值)的点,这些点的坐标(k,b)就是图像中可能出线的直线的斜率和截距;
为了容易理解,这里采用了直线的斜截表达法。
事实上这种方法并不使用,因为某些直线的斜率很大的甚至不存在。
实际操作中,检测直线的霍夫变换使用含极坐标参数的直线表示型式,简称极坐标式(不是极坐标方程,因为还是在笛卡尔坐标下表示)
")
其中的两个参数的意义如下图:
")
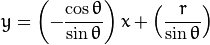
这样,每条直线对应于theta-p空间下的一条正弦曲线,同样采用投票求极值的方法寻找曲线
霍夫变换直线检测的matlab实现:
这里涉及到三个函数:hough,houghpeaks,houghlines:
1、[H,T,R] =hough(BW,'Theta',20:0.1:75) ; (输入二值图像BW,角度范围与步进(最大,[-90, 90)),返回H-霍夫空间,T-theta,R-p);
2、PEAKS =houghpeaks(H,NUMPEAKS) ;(输入霍夫空间和极值数量,返回极值的坐标)
3、LINES=houghlines(BW,T,R,Peaks) ; (返回lines是一个包含图像中线段首末点、p、theta的结构体)
代码:
I=imread('1.jpg');
Ihsv=rgb2hsv(I);
Iv=Ihsv(:,:,3);%提取v空间
Ivl=Iv(500:end,:);%截取下半部
Iedge=edge(Ivl,'sobel');%边沿检测
Iedge = imdilate(Iedge,ones(3));%图像膨胀
%新建窗口,绘图用
figure (2)
imshow(Iedge);
hold on
%左方直线检测与绘制
%得到霍夫空间
[H1,T1,R1] = hough(Iedge,'Theta',20:0.1:75);
%求极值点
Peaks=houghpeaks(H1,5);
%得到线段信息
lines=houghlines(Iedge,T1,R1,Peaks); %绘制线段
for k=1:length(lines)
xy=[lines(k).point1;
lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',4);
end
%右方直线检测与绘制
[H2,T2,R2] = hough(Iedge,'Theta',-75:0.1:-20);
Peaks1=houghpeaks(H2,5);
lines1=houghlines(Iedge,T2,R2,Peaks1);
for k=1:length(lines1)
xy1=[lines1(k).point1;lines1(k).point2];
plot(xy1(:,1),xy1(:,2),'LineWidth',4);
end输入图像:")
还有一种理解思路:
设已知一黑白图像上画了一条直线,要求出这条直线所在的位置。我们知道,直线的方程可以用y=k*x+b 来表示,其中k和b是参数,分别是斜率和截距。过某一点(x0,y0)的所有直线的参数都会满足方程y0=kx0+b。即点(x0,y0)确定了一组直线。方程y0=kx0+b在参数k--b平面上是一条直线,(你也可以是方程b=-x0*k+y0对应的直线)。这样,图像x--y平面上的一个前景像素点就对应到参数平面上的一条直线。我们举个例子说明解决前面那个问题的原理。设图像上的直线是y=x, 我们先取上面的三个点:A(0,0), B(1,1), C(2,2)。可以求出,过A点的直线的参数要满足方程b=0, 过B点的直线的参数要满足方程1=k+b, 过C点的直线的参数要满足方程2=2k+b, 这三个方程就对应着参数平面上的三条直线,而这三条直线会相交于一点(k=1,b=0)。 同理,原图像上直线y=x上的其它点(如(3,3),(4,4)等) 对应参数平面上的直线也会通过点(k=1,b=0)。
众所周知, 一条直线在图像二维空间可由两个变量表示. 例如:
- 在 笛卡尔坐标系: 可由参数:
- 在 极坐标系: 可由参数:
对于霍夫变换, 我们将用 极坐标系 来表示直线. 因此, 直线的表达式可为:
化简得:
一般来说对于点
这就意味着每一对
如果对于一个给定点
只绘出满足下列条件的点
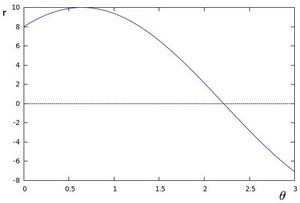
我们可以对图像中所有的点进行上述操作. 如果两个不同点进行上述操作后得到的曲线在平面
这三条曲线在
那么以上的材料要说明什么呢? 这意味着一般来说, 一条直线能够通过在平面
这就是霍夫线变换要做的. 它追踪图像中每个点对应曲线间的交点. 如果交于一点的曲线的数量超过了 阈值, 那么可以认为这个交点所代表的参数对
霍夫变换直线检测的opencv实现:
int main( )
")
 斜率和截距表示.
斜率和截距表示. 极径和极角表示
极径和极角表示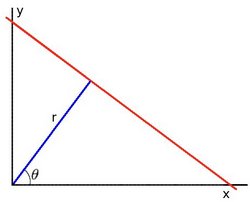

 , 我们可以将通过这个点的一族直线统一定义为:
, 我们可以将通过这个点的一族直线统一定义为:
 代表一条通过点
代表一条通过点  and
and  我们可以绘出下图 (在平面
我们可以绘出下图 (在平面  -
-  ):
):
 and
and  .
. ,
,  和点
和点  ,
,  绘图, 得到下图:
绘图, 得到下图:
 , 坐标表示的是参数对 (
, 坐标表示的是参数对 ( ) 或者是说点
) 或者是说点  和点
和点  组成的平面内的的直线.
组成的平面内的的直线. 在原图像中为一条直线.
在原图像中为一条直线.文章来源: blog.csdn.net,作者:网奇,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/jacke121/article/details/54799970

- 点赞
- 收藏
- 关注作者
评论(0)