Python OpenCV 之霍夫圆检测应用

Python OpenCV 365 天学习计划,与橡皮擦一起进入图像领域吧。本篇博客是这个系列的第 35 篇。
基础知识铺垫
通过检索相关资料,学习到了霍夫圆检测的一点点皮毛知识,它的基本内容是认为图像上任何一个非零像素点,都有可能是一个潜在圆形上的一点。通过投票计算,生成累计坐标平面,然后在设置一个累计权重,去定位圆。
在笛卡尔坐标系中圆的方程为 ( x − a ) 2 + ( y − a ) 2 = r 2 (x-a)^2 + (y - a)^2=r^2 (x−a)2+(y−a)2=r2,其中(a,b)是圆心,r 是半径,具体你可以画一张图表示一下。
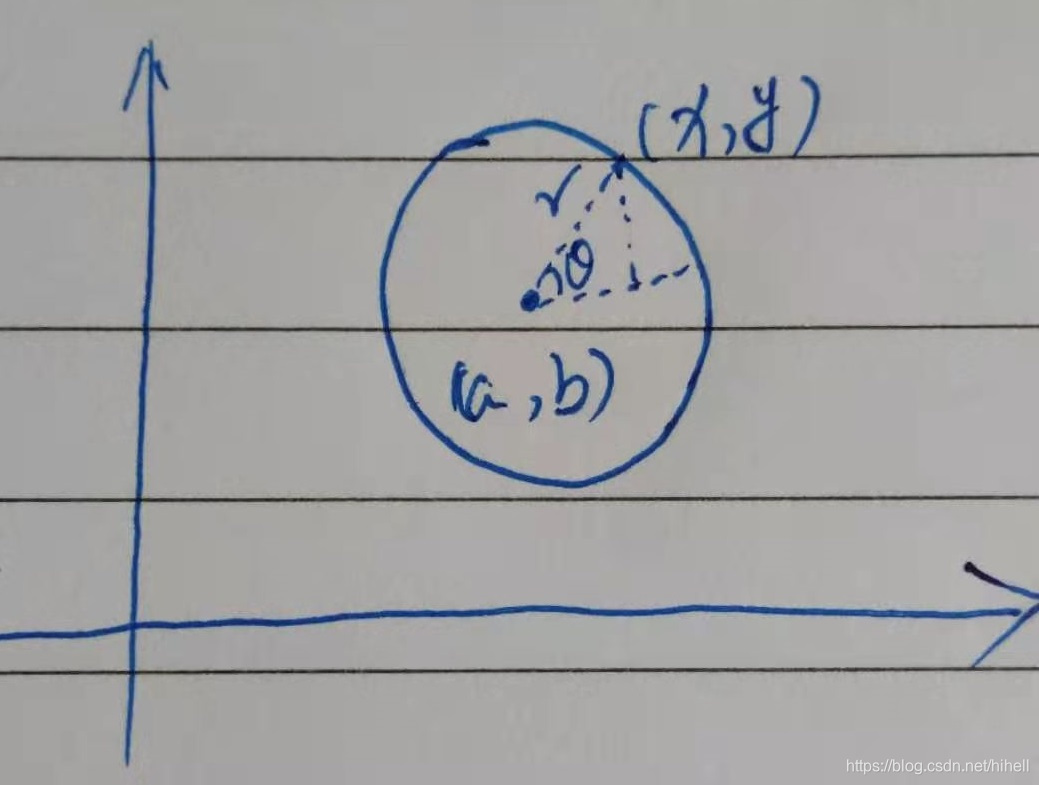
并且根据图片,可以看出如下结果
x = a + r cos θ x=a+r \cos \theta x=a+rcosθ
y = b + r sin θ y=b+ r\sin \theta y=b+rsinθ
也就是下面的表示形式:
a = x − r cos θ a=x-r \cos \theta a=x−rcosθ
b = y − r sin θ b=y-r \sin \theta b=y−rsinθ
接下来还有几句不太好理解,但是大概明白意思的几个结论。
在笛卡尔坐标系中经过某一点的所有圆,映射到 abr 坐标系是一条三维的曲线
或者解释成,对于笛卡尔 xy 平面的一个点 x 0 , y 0 x_0,y_0 x0,y0,对应到 abr 组成三维空间,是一个空间曲面,对于 abr 平面的一个点,对应到笛卡尔 xy 平面它是一个圆。
经过笛卡尔坐标系中所有非零像素点的所有圆,构成了 abr 坐标系中很多条三维的曲线
在笛卡尔坐标系中同一个圆上的所有点方程是相同的,它们映射到 abr 坐标系中是同一个点,所以该点累计到一定数量之后(一般设定大于一个阈值),就可以认为是圆。
如果在 xy 平面上的三个点 ( x 0 , y 0 ) , ( x 1 , y 1 ) , ( x 2 , y 2 ) (x_0,y_0),(x_1,y_1),(x_2,y_2) (x0,y0),(x1,y1),(x2,y2),在 abr 三维空间是对应的三个空间曲面(此时 abr 相当于常量)。
上述内容描述成方程如下:
( x 0 − a ) 2 + ( y 0 − a ) 2 = r 2 (x_0-a)^2 + (y_0 - a)^2=r^2 (x0−a)2+(y0−a)2=r2
( x 1 − a ) 2 + ( y 1 − a ) 2 = r 2 (x_1-a)^2 + (y_1 - a)^2=r^2 (x1−a)2+(y1−a)2=r2
( x 2 − a ) 2 + ( y 2 − a ) 2 = r 2 (x_2-a)^2 + (y_2 - a)^2=r^2 (x2−a)2+(y2−a)2=r2
求解这三个方程,我们可以得到 abr 的值。这说明 ( x 0 , y 0 ) , ( x 1 , y 1 ) , ( x 2 , y 2 ) (x_0,y_0),(x_1,y_1),(x_2,y_2) (x0,y0),(x1,y1),(x2,y2)这三个点在由abr 所确定的圆上(即 abr 分别表示圆的圆心坐标 (x,y) 以及圆的半径 r)。
上面描述的就是标准霍夫圆变换的原理,但三维空间的计算量非常大,标准霍夫圆变化很难被应用到实际中。所以就出现了本文涉及的函数,霍夫梯度法, 也叫 2-1 霍夫变换(21HT)。
函数原型
python OpenCV 提供了 HoughCircles 函数来寻找圆形,函数原型如下:
circles = cv2.HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]])
- 1
参数如下:
image:输入图像;method:检测圆形的方法,目前支持cv2.HOUGH_GRADIENT;dp:累加器分辨率与图像分辨率反比,dp获取越大,累加器数组越小,一般默认为 1;minDist:圆心与圆心之间的距离;param1:边缘检测梯度值,Canny 函数的高阈值,默认 100;param2:cv2.HOUGH_GRADIENT累加器阈值,阈值越小,检测到的圆形越多,默认 100;minRadius:半径的最小值,单位为像素;maxRadius:半径的最大值,单位为像素;
返回值中每一个向量的参数分别为:第一个元素是圆的横坐标,第二个是纵坐标,第三个是半径大小。
注意:minRadius 和 maxRadius 可以更好选则圆,如果不需要,保持默认值 0 即可。
测试代码如下,运行可以直接查看效果。
import cv2
src = cv2.imread("./core.jpg")
# 图像预处理
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
img = cv2.medianBlur(gray, 7)
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 60, param1=190, param2=30, minRadius=50, maxRadius=0)
# TypeError: Argument 'radius' is required to be an integer
for x, y, r in circles[0]: cv2.circle(src, (int(x), int(y)), int(r), (0, 0, 255), 2, cv2.LINE_AA)
cv2.imshow('circle', src)
cv2.waitKey(0)
cv2.destroyWindow()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
运行效果如下图所示,虽然检测没有问题,但是在调参的过程中确实耗费了大量的时间,主要在 minDist 参数、param1 参数上,如果稍微没有调整好,就会出现下图下面的情况。

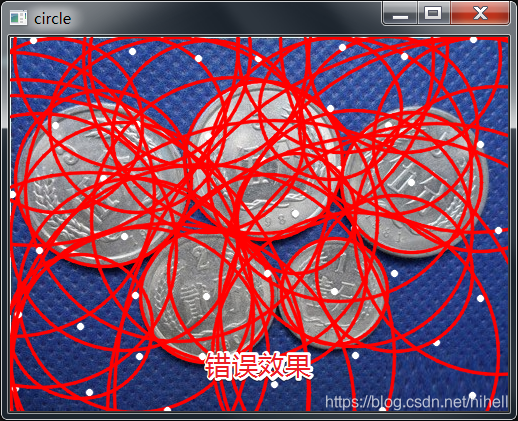
霍夫圆检测对噪声比较敏感,所有进行霍夫圆检测的时候要先进行中值滤波。
使用高斯滤波器去噪,修改代码如下:
gaussian = cv2.GaussianBlur(gray, (7, 7),0)
circles = cv2.HoughCircles(gaussian, cv2.HOUGH_GRADIENT, 1, 60, param1=220, param2=30, minRadius=50, maxRadius=0)
- 1
- 2
- 3
- 4
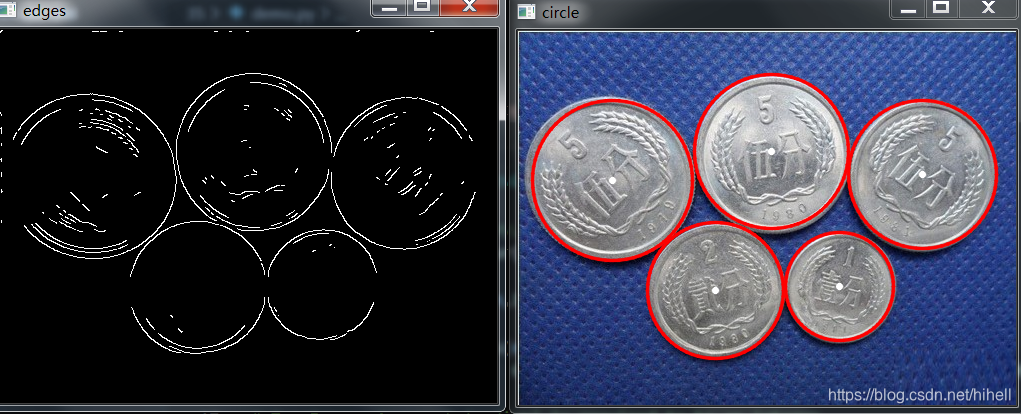
如果你还要增加边缘检测的话,代码调参就更加繁琐了,例如增加 Canny算子
gaussian = cv2.GaussianBlur(gray, (7, 7),0)
# 利用 Canny 进行边缘检测
edges = cv2.Canny(gaussian,160,180, apertureSize=3)
cv2.imshow("edges",edges)
circles = cv2.HoughCircles(edges, cv2.HOUGH_GRADIENT, 1, 60, param1=1500, param2=30, minRadius=50, maxRadius=0)
- 1
- 2
- 3
- 4
- 5
- 6
得到的最终效果也比较满意
运行代码过程中如果出现如下错误,表示未找到任何圆形,继续修改参数即可。
TypeError: 'NoneType' object is not subscriptable
- 1
橡皮擦的小节
希望今天的 1 个小时(今天内容有点多,不一定可以看完),你有所收获,我们下篇博客见~
私人联系方式:moshanba
使用大闪光术(CTRL+A)发现橡皮擦私人联系方式。
相关阅读
技术专栏
今天是持续写作的第 76 / 100 天。
如果你有想要交流的想法、技术,欢迎在评论区留言。
如果你想跟博主建立亲密关系,可以关注同名公众号 梦想橡皮擦,近距离接触一个逗趣的互联网高级网虫。
博主 ID:梦想橡皮擦,希望大家点赞、评论、收藏。
文章来源: blog.csdn.net,作者:梦想橡皮擦,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/hihell/article/details/113731920

- 点赞
- 收藏
- 关注作者
评论(0)