GitHub开源:100美元自制激光雷达

【摘要】 近期俄罗斯一位 Github 主开源了一款DIY激光雷达项目,从 PCB 到上位机软件全部开源,激光雷达实物效果图如下所示:
该激光雷达性能指标如下所示:
扫描速度:每秒 15 次分辨率:大约检测距离的 1%,但不会优于±2 cm最小检测距离:5 cm最大检测距离:大约 25 米(白色反射平面)角分辨率:0.5 度扫描频率:大约 11 kHz扫描角度范围:大约 ...
近期俄罗斯一位 Github 主开源了一款DIY激光雷达项目,从 PCB 到上位机软件全部开源,激光雷达实物效果图如下所示:

该激光雷达性能指标如下所示:
- 扫描速度:每秒 15 次
- 分辨率:大约检测距离的 1%,但不会优于±2 cm
- 最小检测距离:5 cm
- 最大检测距离:大约 25 米(白色反射平面)
- 角分辨率:0.5 度
- 扫描频率:大约 11 kHz
- 扫描角度范围:大约 230 度,改变相应结构还有一定提升空间
- 功率:5 V/0.1 A(也就是 0.5 瓦),刚启动时电压可能会超过 0.8A
- 尺寸:50x50x120 mm
激光雷达结构效果图如下所示:
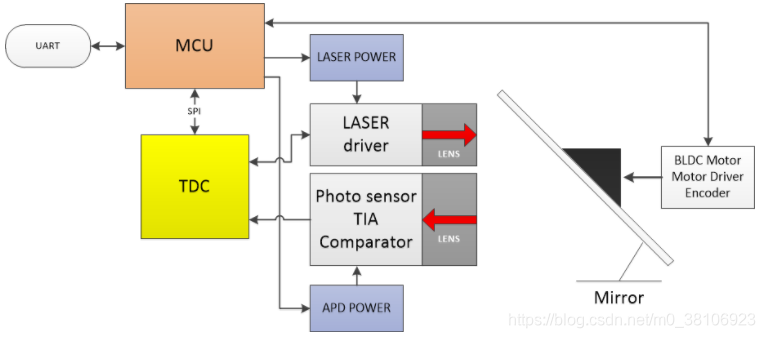
激光雷达采用的是 TOF(Time-of-Flight)测距原理,这种类型的测距仪被军队积极使用,它们被用于大地测量学、地球遥感、工业、自动驾驶汽车等领域中,它们被安装在无人机上可以在需要长距离测量的任何地方。
GitHub参见:https://github.com/iliasam/OpenTOFLidar
项目说明参见:https://habr.com/ru/post/485574/
文章来源: handsome-man.blog.csdn.net,作者:不脱发的程序猿,版权归原作者所有,如需转载,请联系作者。
原文链接:handsome-man.blog.csdn.net/article/details/105170525

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)