双目摄像头内参如何使用? 如何转化数据?

目录
准备工作:(双目视觉 定标+矫正,来获取数据)
1.双目摄像头

2.双目 定标+矫正后的参数
CameraParameters1 与 CameraParameters2为左右摄像头的内部参数,
摄像头的内部参数,如 CameraParameters1 左相机为例:
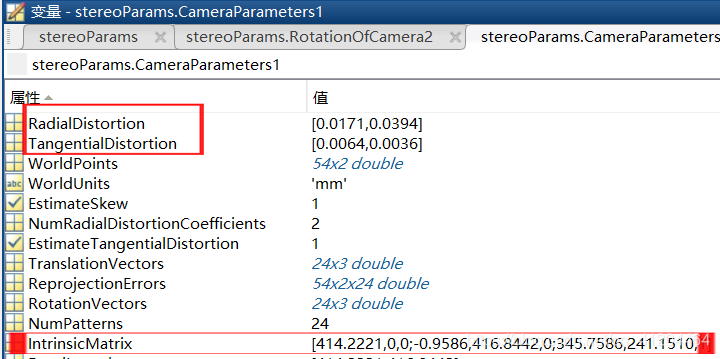
要用到的用红色框出的参数;
RadialDistortion 和TangentialDistortion 中存放的是畸变参数。
IntrinsicMatrix 存放的是摄像头的内参
1)IntrinsicMatrix 参数
先看一下 IntrinsicMatrix 参数,双击一下 IntrinsicMatrix

这个和OpenCV中是转置的关系,注意不要搞错。
对应:

即:
420.758142829981 -0.457820850080972 344.440839504749
0 423.157176819330 242.870587685168
0 0 1
2)径向畸变、切向畸变
RadialDistortion 为 径向畸变,摄像头由于光学透镜的特性使得成像存在着径向畸变,可由K1,K2,K3确定。
TangentialDistortion 为 切向畸变,由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数P1,P2确定。
需要注意参数的排放顺序,即K1,K2,P1,P2,K3
例如, 左相机为例:
RadialDistortion :0.016004928431323 , 0.041062484186359 对应 K1,K2 ; K3默认为0
TangentialDistortion :0.005480700176874 , 0.003979285309815 对应 P1,P2
所以在opencv中使用时,K1,K2,P1,P2,K3顺序 :
0.016004928431323 , 0.041062484186359 , 0.005480700176874 , 0.003979285309815 ,0
3)旋转参数、平移参数
RotationOfCamera2 为两个摄像头的旋转参数 TranslationOfCamera2 平移参数
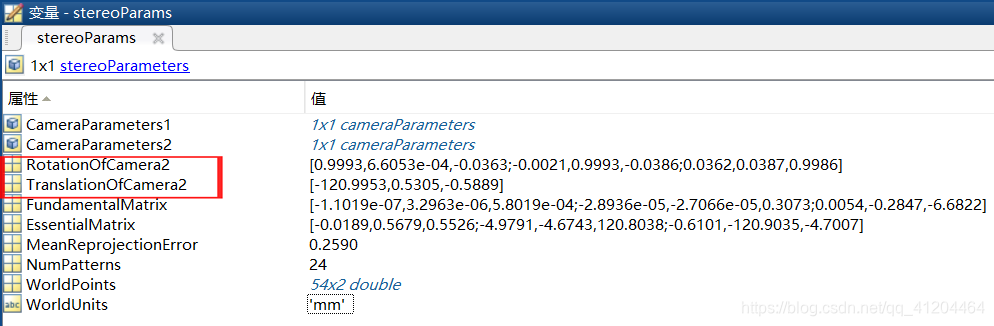
TranslationOfCamera2 可以直接使用 (在opencv中)
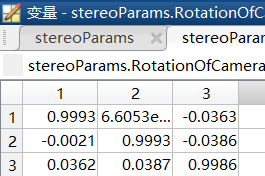
RotationOfCamera2 相对 opencv ,需要转化
原数据:
转化为opencv 可以用的数据:
0.9993 -0.002 0.0362
0.00066 0.9992 0.03869
-0.0362 -0.0386 0.9985
(转化规律:横轴数据 --> 纵轴数据),具体可以查查opencv、相机、实际世界 坐标的关系,和转化
希望对你有帮助。
文章来源: guo-pu.blog.csdn.net,作者:一颗小树x,版权归原作者所有,如需转载,请联系作者。
原文链接:guo-pu.blog.csdn.net/article/details/86710737

- 点赞
- 收藏
- 关注作者
评论(0)