3D激光SLAM:LeGO-LOAM论文解读---特征提取部分

【摘要】
3D激光SLAM:LeGO-LOAM论文解读---特征提取部分
特征提取原文
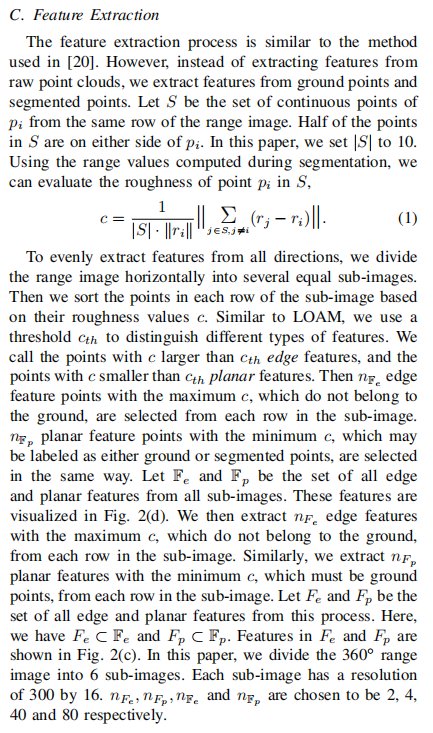
特征提取
这一部分和LOAM差不多
区别是 LeGO-LOAM 不是从原始点云中提取特征,而是从地面点和分割...
特征提取
这一部分和LOAM差不多
区别是 LeGO-LOAM 不是从原始点云中提取特征,而是从地面点和分割点中提取特征。
先算一个曲率

这个曲率和一个阈值比较
大于阈值就是角点,小于阈值就是面点
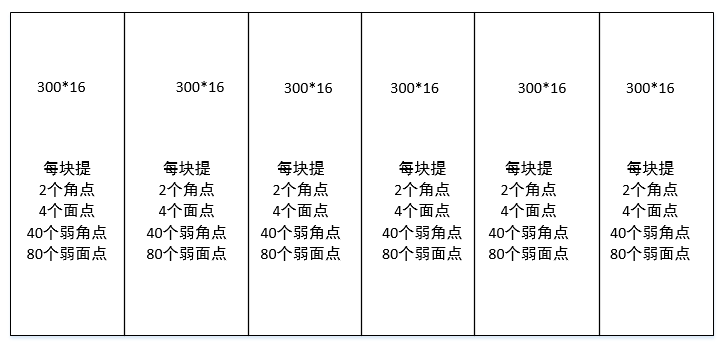
和LOAM一样,也把每个scan分成6段子图
那每个子图就是
300*16的点
在每个子图中选取
- 角点 2 个
- 面点4个
- 弱角点 40个
- 弱面点 80个

原文
文章来源: blog.csdn.net,作者:月照银海似蛟龙,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_32761549/article/details/126034661

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)