
个人介绍
这个人很懒,什么都没有留下
感兴趣或擅长的领域
暂无数据
个人勋章
TA还没获得勋章~
成长雷达
220
0
0
0
0
达成规则
全部时间
全部时间
最近三天
最近一周
最近一月
- 全部
- 暂无专栏分类
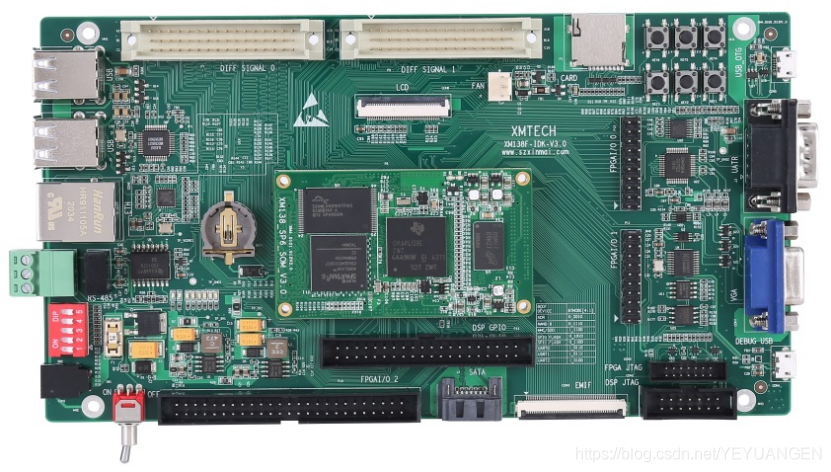


提出基于OMAP-L138的便携式设备状态监测与诊断仪的设计方案。介绍了其软硬件结构设计,重点对数据采集部分的硬件及数据采集模块的软件设计做了详细的介绍。利用了ARM核控制处理优势与DSP核数字处理能力,实现低功耗高性能的优点。
 999+
999+
 0
0
 0
0
2021-06-29 21:29:45







针对EtherCAT的数控系统的实现,提出了一种基于EtherCAT技术的实时通信及DSP控制的可行系统方案,构建了EtherCAT主站网络结构,并重点分析了EtherCAT主站的状态机、分布时钟、CoE协议。
999+
0
0
2021-01-10 12:06:18
上滑加载中