2025-10-27:K 条边路径的最大边权和。用go语言,给定一个有向无环图(节点编号为 0 到 n−1),图的边用一个二维数

2025-10-27:K 条边路径的最大边权和。用go语言,给定一个有向无环图(节点编号为 0 到 n−1),图的边用一个二维数组 edges 表示,其中每个元素 edges[i] = [u_i, v_i, w_i] 表示从 u_i 指向 v_i 的一条边,权重为 w_i。还给出两个整数 k 和 t。
要求找出一条满足下列条件的路径:
-
路径恰好包含 k 条边;
-
路径上所有边的权重之和小于 t(不能等于 t);
在满足以上条件的所有路径中,选择边权和最大的那一条,并返回该最大和。如果不存在任何符合条件的路径,则返回 -1。
1 <= n <= 300。
0 <= edges.length <= 300。
edges[i] = [ui, vi, wi]。
0 <= ui, vi < n。
ui != vi。
1 <= wi <= 10。
0 <= k <= 300。
1 <= t <= 600。
输入图是 有向无环图(DAG)。
不存在重复的边。
输入: n = 3, edges = [[0,1,1],[1,2,2]], k = 2, t = 4。
输出: 3。
解释:
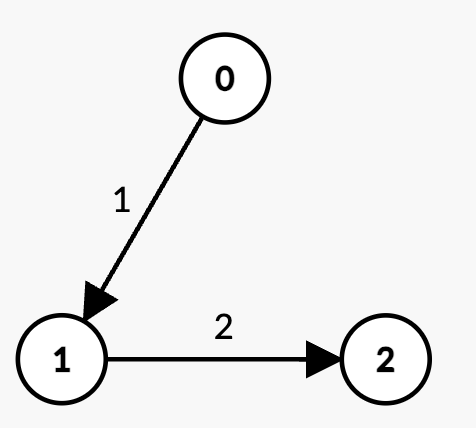
唯一包含 k = 2 条边的路径是 0 -> 1 -> 2,其权重和为 1 + 2 = 3 < t。
因此,最大可能的边权和为 3。
题目来自力扣3544。
🔄 动态规划状态设计
我们定义一个二维 DP 数组 f[i][x],其含义如下:
i:表示路径已经走过的边数。x:表示当前路径到达的节点编号。f[i][x]:这是一个big.Int,它作为一个位掩码(Bit Mask)。这个整数中的每一个二进制位代表一个可能的路径权重和。如果某个权重和s是可达的,那么从节点x出发,经过恰好i条边能够达到这个权重和s,则f[i][x]的第s位会被设置为1。
这种设计巧妙地利用了位图来压缩表示所有可能的路径和,避免了显式地存储每一个数值。
🧩 算法步骤详解
-
初始化
- 首先检查节点数
n是否小于等于边数k。如果是,直接返回-1,因为无法形成k条边的路径。 - 创建 DP 表
f,大小为(k+1) * n,并初始化为0。 - 对于
f[0][x],即所有经过0条边到达节点x的状态。我们将所有f[0][x]的第0位设置为1。这表示从任何节点本身出发(不经过任何边),路径和是0,这是一个合法的起点状态。
- 首先检查节点数
-
状态转移:逐边扩展路径
这是算法的核心循环。我们遍历边数i从0到k-1,对于每个状态f[i][x],我们检查所有从节点x出发的边(x, y, wt)。- 核心操作:对于
f[i][x]中每一个已置位的权重和s(即存在一条到x的i边路径,和为s),我们可以通过加上当前边的权重wt,得到一条到y的i+1边路径,其新权重和为s + wt。 - 位运算实现:这个转移通过位运算高效完成。将
f[i][x]这个位掩码左移wt位,相当于将所有已存在的路径和都增加了wt。然后,使用 按位或(OR) 操作将这个新的状态合并到f[i+1][y]中,表示这些新的路径和也是可达的。 - 约束处理:为了确保路径和严格小于
t,我们创建了一个掩码mask = (1 << t) - 1。在左移后,通过按位与(AND) 操作与这个掩码进行运算。这样可以过滤掉所有大于等于t的路径和(因为它们会移位到第t位及更高位,而被掩码截断),只保留我们关心的部分。
- 核心操作:对于
-
提取最终结果
在所有状态转移完成后,我们检查f[k][x],即所有恰好包含k条边且终点为任意节点x的路径状态。- 我们遍历
f[k][x]中的每一个big.Int。 - 利用
big.Int的BitLen()方法,可以找到这个位掩码中最高位被置1的位置。这个位置减1(因为位数从0开始计算)就代表了所有可达路径中的最大权重和。 - 如果所有
f[k][x]都是0(BitLen()返回0),说明没有符合条件的路径,返回-1。
- 我们遍历
⏱️ 复杂度分析
-
时间复杂度:该算法的时间复杂度主要由三重循环决定:
- 外层循环遍历边数,从
0到k-1,共k次。 - 中层循环遍历所有边,共
E次(E为边的数量)。 - 内层操作是
big.Int的位运算(左移、按位与、按位或),这些操作的时间复杂度与big.Int的位数(大致与t成正比)有关。
因此,总的时间复杂度为 O(k * E * t)。考虑到题目中n,k,E的最大值均为 300,t的最大值为 600,这个复杂度在可接受范围内。
- 外层循环遍历边数,从
-
空间复杂度:空间开销主要用于存储 DP 表
f。表的大小为(k+1) * n,每个元素是一个big.Int,其占用的空间与t成正比(因为需要表示0到t-1位)。因此,总的空间复杂度为 O(k * n * t)。
💎 核心思路总结
这个方法的高明之处在于:
- 状态压缩:使用一个整数的二进制位来标记大量离散的路径和是否可达,极大节省了空间。
- 位运算批量处理:通过左移和按位操作,一次性完成一整批路径状态的转移,提升了效率。
- 利用DAG无环特性:由于图是无环的,按边数进行动态规划可以保证状态转移的正确性,不会出现无限循环。
希望这个分步详解能帮助你透彻地理解这个算法的原理和实现。
Go完整代码如下:
package main
import (
"fmt"
"math/big"
)
func maxWeight(n int, edges [][]int, k int, t int) int {
if n <= k {
return -1
}
f := make([][]*big.Int, k+1)
for i := range f {
f[i] = make([]*big.Int, n)
for j := range f[i] {
f[i][j] = big.NewInt(0)
}
}
for i := range f[0] {
f[0][i] = big.NewInt(1)
}
p := new(big.Int)
mask := new(big.Int).Sub(p.Lsh(big.NewInt(1), uint(t)), big.NewInt(1))
for i, fi := range f[:k] {
for _, e := range edges {
x, y, wt := e[0], e[1], e[2]
if fi[x].Sign() != 0 {
shifted := p.And(p.Lsh(fi[x], uint(wt)), mask)
f[i+1][y].Or(f[i+1][y], shifted)
}
}
}
ans := 0
for _, bi := range f[k] {
ans = max(ans, bi.BitLen())
}
return ans - 1
}
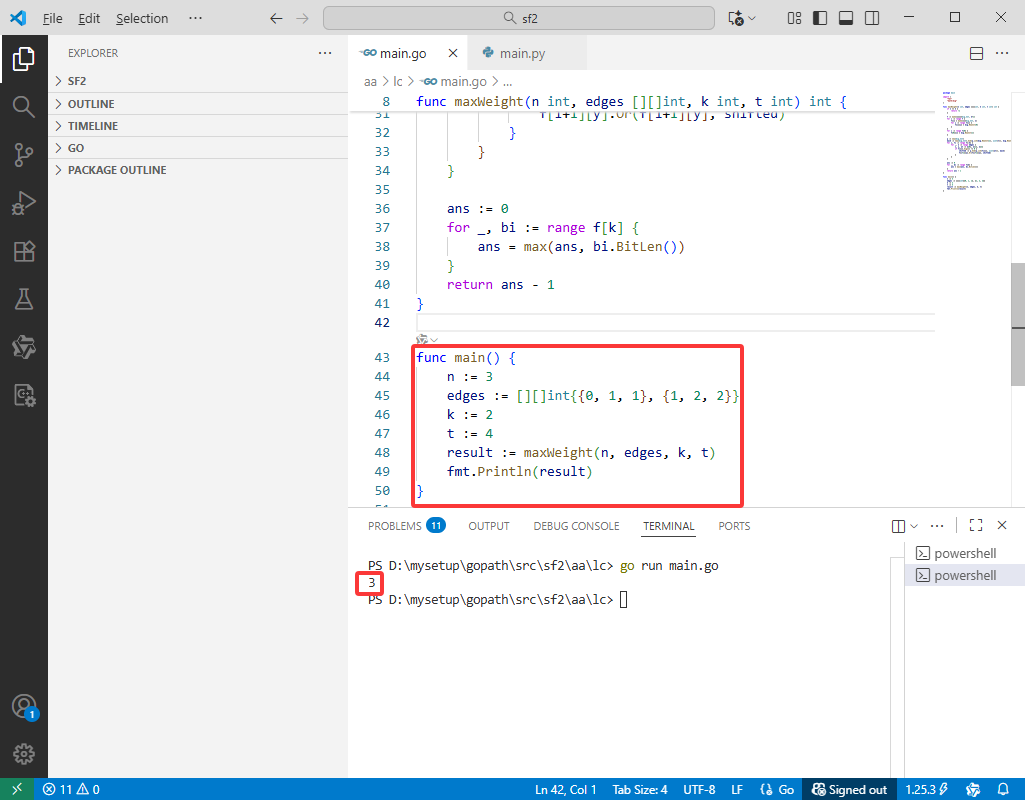
func main() {
n := 3
edges := [][]int{{0, 1, 1}, {1, 2, 2}}
k := 2
t := 4
result := maxWeight(n, edges, k, t)
fmt.Println(result)
}
Python完整代码如下:
# -*-coding:utf-8-*-
def maxWeight(n, edges, k, t):
if n <= k:
return -1
# 初始化DP数组,f[i][j]表示经过i条边到达节点j的权重状态
f = [[0] * n for _ in range(k + 1)]
# 初始化:经过0条边到达任何节点的权重为1(二进制表示)
for i in range(n):
f[0][i] = 1
# 创建掩码用于限制位数
mask = (1 << t) - 1
# 动态规划
for i in range(k):
for edge in edges:
x, y, wt = edge
if f[i][x] != 0:
# 左移权重位并与掩码取AND,然后与目标状态取OR
shifted = (f[i][x] << wt) & mask
f[i + 1][y] |= shifted
# 寻找最大权重(最高位的位置)
ans = 0
for state in f[k]:
if state == 0:
continue
# 计算二进制位数并减1得到最大权重
bit_len = state.bit_length()
ans = max(ans, bit_len - 1)
return ans
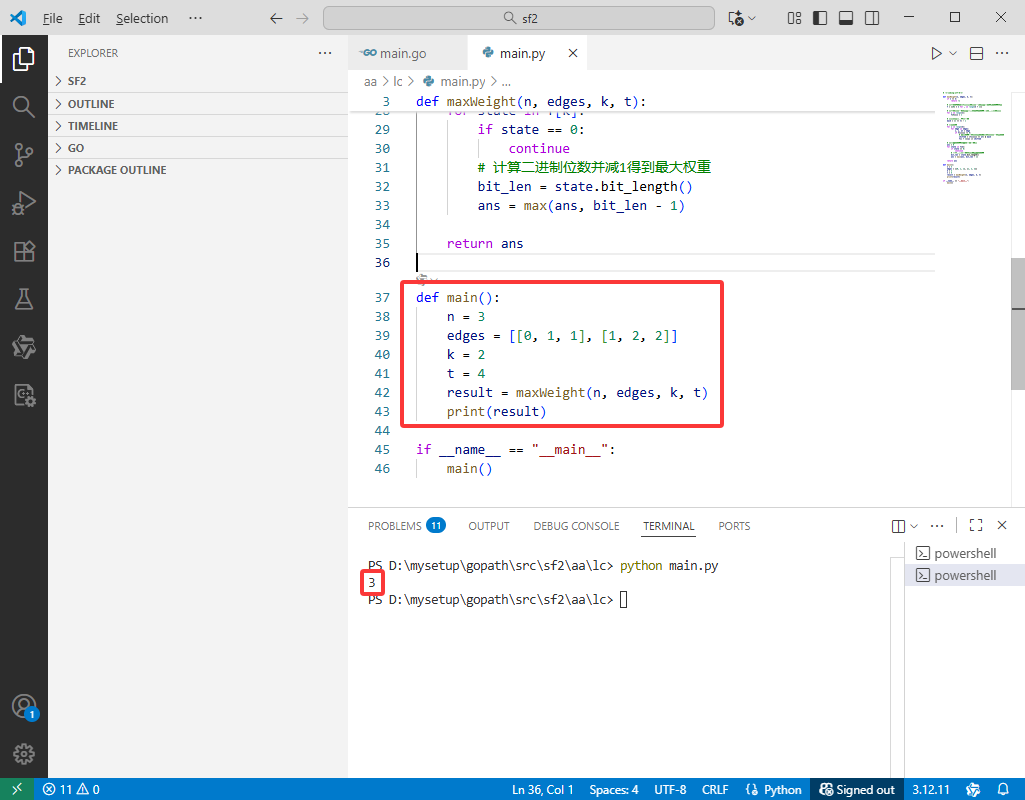
def main():
n = 3
edges = [[0, 1, 1], [1, 2, 2]]
k = 2
t = 4
result = maxWeight(n, edges, k, t)
print(result)
if __name__ == "__main__":
main()

- 点赞
- 收藏
- 关注作者
评论(0)