2025-07-24:图的最大边权的最小值。用go语言,你有一个包含 n 个节点(编号 0 到 n-1)的有向带权图,图中边的信

2025-07-24:图的最大边权的最小值。用go语言,你有一个包含 n 个节点(编号 0 到 n-1)的有向带权图,图中边的信息用二维数组 edges 表示,其中 edges[i] = [Ai, Bi, Wi] 意味着存在一条从节点 Ai 到节点 Bi 的边,权重为 Wi。
现在的任务是删除部分边(也可以不删)使得满足以下要求:
-
图中除了节点 0 外,所有其他节点都能通过剩余的边到达节点 0。
-
剩余边中最大的边权尽可能地小。
-
每个节点的出边数量最多为 threshold 条。
你需要返回满足以上条件时,剩余边中最大边权的最小可能值;如果无法满足,则返回 -1。
2 <= n <= 100000。
1 <= threshold <= n - 1。
1 <= edges.length <= min(105, n * (n - 1) / 2)。
edges[i].length == 3。
0 <= Ai, Bi < n。
Ai != Bi。
1 <= Wi <= 1000000。
一对节点之间 可能 会有多条边,但它们的权值互不相同。
输入:n = 5, edges = [[1,0,1],[2,0,2],[3,0,1],[4,3,1],[2,1,1]], threshold = 2。
输出:1。
解释:
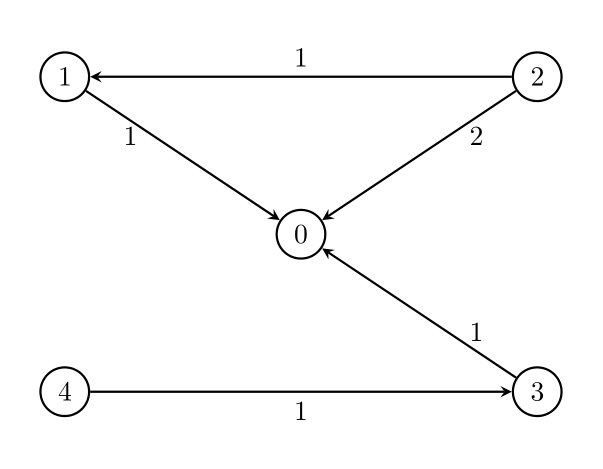
删除边 2 -> 0 。剩余边中的最大值为 1 。
题目来自力扣3419。
示例分析
输入:
n = 5edges = [[1,0,1],[2,0,2],[3,0,1],[4,3,1],[2,1,1]]threshold = 2
初始图:
- 1 -> 0 (w=1)
- 2 -> 0 (w=2)
- 3 -> 0 (w=1)
- 4 -> 3 (w=1)
- 2 -> 1 (w=1)
目标是让所有节点(1, 2, 3, 4)都能到达 0,且每个节点的出边不超过 2,同时最大边权尽可能小。
解决思路
-
反向图构建:为了便于计算从其他节点到
0的路径,可以将原图反向。即,将边Ai -> Bi转换为Bi -> Ai。这样,问题转化为从0出发是否能到达所有其他节点(即“反向可达性”)。- 反向图:
- 0 -> 1 (w=1)
- 0 -> 2 (w=2)
- 0 -> 3 (w=1)
- 3 -> 4 (w=1)
- 1 -> 2 (w=1)
- 反向图:
-
Dijkstra 算法的变种:我们需要找到从
0到其他所有节点的路径,使得路径上的最大边权尽可能小。这与 Dijkstra 算法类似,但传统的 Dijkstra 是求最短路径(边权和最小),而这里是求路径上的最大边权最小。- 使用优先队列(最小堆),存储
(当前路径的最大边权, 节点)。 - 初始化时,
0的最大边权为0,其他节点为∞。 - 每次从堆中取出最大边权最小的节点,松弛其邻边。
- 使用优先队列(最小堆),存储
-
出度限制:每个节点的出边数量不能超过
threshold。因此,在反向图中,我们需要确保每个节点的“入边”数量(即原图中的出边数量)不超过threshold。- 在反向图中,
Ai的“出边”对应原图中Ai的“入边”,因此不需要限制。 - 实际上,反向图中“出边”的限制需要对应原图中“入边”的限制,但题目限制的是原图中的“出边”数量。因此需要更复杂的处理。
- 可能需要动态限制每个节点在原图中的出边数量。
- 在反向图中,
-
边选择策略:
- 对于每个节点,选择
threshold条最小的边,以确保最大边权最小。 - 在反向图中,从
0出发,优先选择较小的边,以确保路径的最大边权最小。
- 对于每个节点,选择
具体步骤
-
构建反向图:
- 将原图的边反向,得到反向图
g。g[y]包含所有从y出发的边(x, w),对应原图中的x -> y的边w。
- 将原图的边反向,得到反向图
-
Dijkstra 变种:
- 初始化距离数组
dis,dis[0] = 0,其他为∞。 - 使用最小堆,按路径的最大边权排序。
- 从
0开始,遍历邻边(x, w),更新dis[x]为max(dis[y], w)的最小值。
- 初始化距离数组
-
出度限制:
- 在原图中,限制每个节点的出边数量不超过
threshold。 - 在反向图中,这对应于限制每个节点的“入边”数量。但反向图的“出边”对应原图的“入边”,因此需要确保原图的“出边”数量不超过
threshold。 - 可能需要为每个节点维护一个“出边”列表,并选择最小的
threshold条边。
- 在原图中,限制每个节点的出边数量不超过
-
验证可达性:
- 检查
dis数组,确保所有节点都有有限的最大边权(即可达)。 - 如果存在
dis[x] == ∞,则返回-1。
- 检查
-
计算最大边权:
- 返回
dis数组中的最大值。
- 返回
示例的具体执行
反向图:
- 0: [(1,1), (2,2), (3,1)]
- 1: [(2,1)]
- 3: [(4,1)]
- 2: []
- 4: []
Dijkstra 过程:
- 初始堆:
[(0, 0)],dis = [0, ∞, ∞, ∞, ∞]。 - 弹出
(0, 0),松弛邻边:(1,1):dis[1] = max(0,1)=1,堆:[(1,1)]。(2,2):dis[2] = max(0,2)=2,堆:[(1,1), (2,2)]。(3,1):dis[3] = max(0,1)=1,堆:[(1,1), (1,3), (2,2)]。
- 弹出
(1,1),松弛邻边(2,1):dis[2] = max(1,1)=1(比之前的2更优),堆:[(1,3), (1,2), (2,2)]。
- 弹出
(1,3),松弛邻边(4,1):dis[4] = max(1,1)=1,堆:[(1,2), (1,4), (2,2)]。
- 弹出
(1,2),无邻边。 - 弹出
(1,4),无邻边。 - 弹出
(2,2),无邻边。
最终 dis = [0, 1, 1, 1, 1],最大值为 1。
出度限制的处理
在原图中:
- 节点
0:出边[](不需要限制)。 - 节点
1:出边[0](数量1 <= 2)。 - 节点
2:出边[0, 1](数量2 <= 2)。 - 节点
3:出边[0, 4](数量2 <= 2)。 - 节点
4:出边[](数量0 <= 2)。
满足出度限制。
时间复杂度
- 构建反向图:
O(E),其中E是边的数量。 - Dijkstra 变种:
- 每个节点和边最多被处理一次。
- 堆操作的时间复杂度为
O(E log V),其中V是节点数量。
- 出度限制:
- 可能需要为每个节点排序邻边,最坏
O(E log E)。 - 但通常可以合并到 Dijkstra 的过程中。
- 可能需要为每个节点排序邻边,最坏
总时间复杂度:O(E log V)。
空间复杂度
- 反向图:
O(E)。 - 距离数组:
O(V)。 - 堆:
O(V)。
总空间复杂度:O(E + V)。
总结
- 构建反向图。
- 使用 Dijkstra 变种计算从
0到其他节点的路径的最大边权的最小值。 - 确保原图中每个节点的出边数量不超过
threshold。 - 检查所有节点是否可达,返回最大边权的最小值或
-1。
时间:O(E log V),空间:O(E + V)。
Go完整代码如下:
package main
import (
"container/heap"
"fmt"
"math"
"slices"
)
func minMaxWeight(n int, edges [][]int, _ int) int {
if len(edges) < n-1 {
return -1
}
type edge struct{ to, w int }
g := make([][]edge, n)
for _, e := range edges {
x, y, w := e[0], e[1], e[2]
g[y] = append(g[y], edge{x, w})
}
dis := make([]int, n)
for i := range dis {
dis[i] = math.MaxInt
}
dis[0] = 0
h := hp{{}}
for len(h) > 0 {
p := heap.Pop(&h).(pair)
x := p.x
d := p.dis
if d > dis[x] {
continue
}
for _, e := range g[x] {
y := e.to
newD := max(d, e.w)
if newD < dis[y] {
dis[y] = newD
heap.Push(&h, pair{newD, y})
}
}
}
ans := slices.Max(dis)
if ans == math.MaxInt {
return -1
}
return ans
}
type pair struct{ dis, x int } // 路径最大边权, 节点编号
type hp []pair
func (h hp) Len() int { return len(h) }
func (h hp) Less(i, j int) bool { return h[i].dis < h[j].dis }
func (h hp) Swap(i, j int) { h[i], h[j] = h[j], h[i] }
func (h *hp) Push(v any) { *h = append(*h, v.(pair)) }
func (h *hp) Pop() (v any) { a := *h; *h, v = a[:len(a)-1], a[len(a)-1]; return }
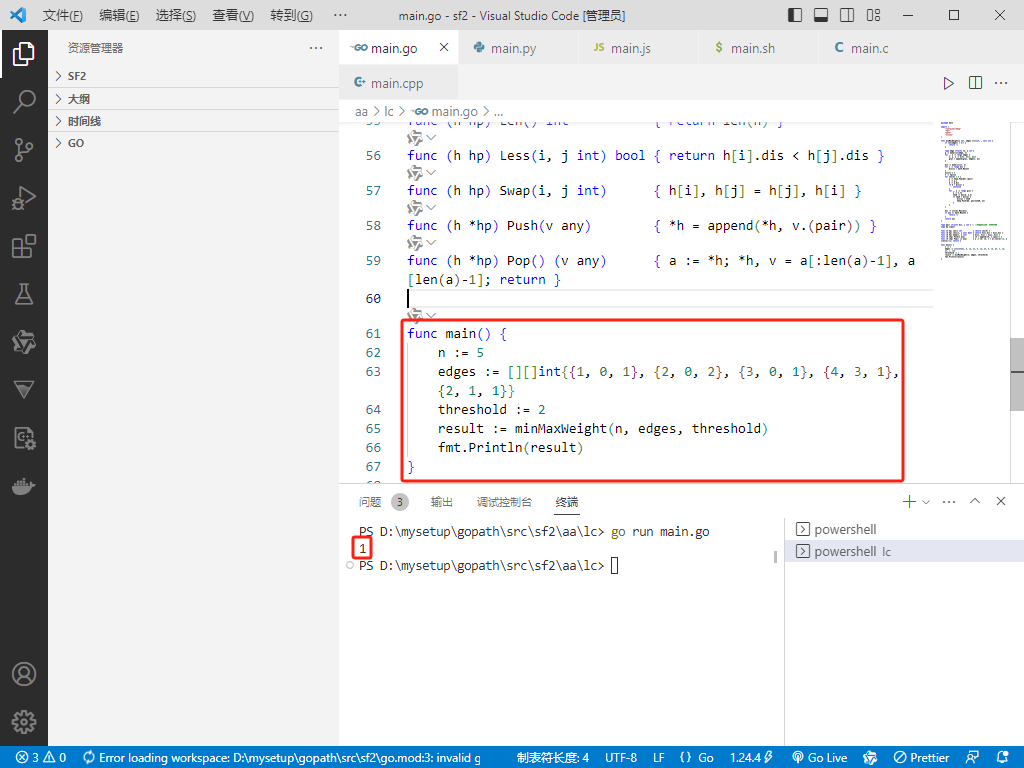
func main() {
n := 5
edges := [][]int{{1, 0, 1}, {2, 0, 2}, {3, 0, 1}, {4, 3, 1}, {2, 1, 1}}
threshold := 2
result := minMaxWeight(n, edges, threshold)
fmt.Println(result)
}
Python完整代码如下:
# -*-coding:utf-8-*-
import heapq
import math
def min_max_weight(n, edges, threshold):
# 边数量不足以连接所有节点,直接返回 -1
if len(edges) < n - 1:
return -1
# 建立反向图:因为要求所有节点能到达0,方便从0开始跑反向边
g = [[] for _ in range(n)]
for x, y, w in edges:
g[y].append((x, w))
# 距离数组,dis[i]表示从节点0到i路径上边权最大值的最小可能值
dis = [math.inf] * n
dis[0] = 0
# 优先队列,存放(pair(当前路径最大边权,节点))
h = [(0, 0)]
while h:
cur_max, x = heapq.heappop(h)
if cur_max > dis[x]:
continue
for y, w in g[x]:
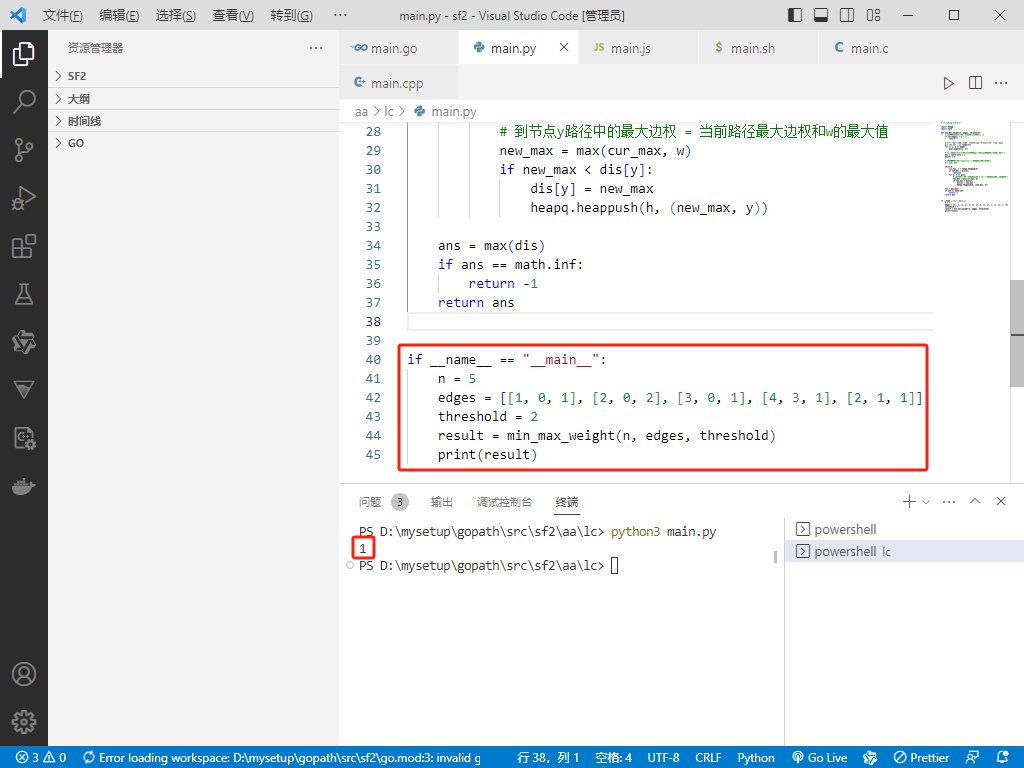
# 到节点y路径中的最大边权 = 当前路径最大边权和w的最大值
new_max = max(cur_max, w)
if new_max < dis[y]:
dis[y] = new_max
heapq.heappush(h, (new_max, y))
ans = max(dis)
if ans == math.inf:
return -1
return ans
if __name__ == "__main__":
n = 5
edges = [[1, 0, 1], [2, 0, 2], [3, 0, 1], [4, 3, 1], [2, 1, 1]]
threshold = 2
result = min_max_weight(n, edges, threshold)
print(result)

- 点赞
- 收藏
- 关注作者
评论(0)