【数字图像】数字图像锐化处理的奇妙之旅



🌈个人主页:
🔥 系列专栏:《数字图像处理 | 奇遇记》
⏰诗赋清音:星河耀眼情何限,壮志豁达励人魂。 临风高歌激长夜,心向征程任风留。
⛳️1. 初识数字图像处理
数字图像处理是一门涉及获取、处理、分析和解释数字图像的科学与工程领域。这一领域的发展源于数字计算机技术的进步,使得对图像进行复杂的数学和计算处理变得可能。以下是数字图像处理技术的主要特征和关键概念:
图像获取:
- 数字图像处理的起点是通过传感器或其他设备获取的图像。这些图像可以来自各种源,包括摄像头、卫星、医学仪器等。
- 数字图像通常由像素组成,每个像素代表图像中的一个小区域,具有特定的亮度值或颜色值。
数字图像的表示:
- 图像在计算机中以数字形式表示,其中每个像素的亮度值或颜色值通过数字进行编码。灰度图像使用单一通道表示,而彩色图像则包含多个通道,如红、绿、蓝(RGB)。
- 图像表示的质量和分辨率对后续处理步骤至关重要。
基本图像处理操作:
- 滤波与增强: 应用各种滤波器来平滑图像、去除噪声或突出图像中的特定特征。
- 直方图均衡化: 调整图像的对比度,以使图像中的不同亮度级别更均匀分布。
- 缩放与旋转: 调整图像的大小和方向,以适应特定的需求或算法。
图像分析与特征提取:
- 边缘检测: 识别图像中物体之间的边界。
- 目标识别: 识别并定位图像中的特定对象。
- 特征提取: 提取图像中的关键特征,如纹理、形状和颜色信息。
图像处理应用领域:
- 医学影像处理: 用于诊断、治疗规划和手术导航。
- 计算机视觉: 用于实现机器视觉系统,如人脸识别、目标跟踪等。
- 遥感图像处理: 用于分析地球观测卫星传感器获取的图像。
数字图像处理的挑战与发展趋势:
- 实时处理: 处理大规模高分辨率图像的实时需求。
- 深度学习: 使用深度学习方法进行更复杂的图像分析任务。
- 图像安全性: 开发用于图像水印、加密和隐私保护的技术。
数字图像处理是图像的魔法,将普通像素变成可视艺术品。数字图像处理就像是一个让我们在像素的海洋中畅游的冒险旅程,让我们从图像中发现不可思议的宝藏,同时也让我们变身为图像的掌控者,用数学的魔法为图像创造新的奇迹。所以,让我们一起跟随这位数字图像处理的魔法师,用笑容和好奇心,开启一场图像之旅吧!
⛳️2. 数字图像锐化处理
🌍一、研究目的
-
理解数字图像锐化处理算法的原理:阐述数字图像锐化处理算法的核心原理,深入探讨相关概念和数学基础,以建立对算法本质的清晰理解。
-
熟悉数字图像锐化处理算法:详细介绍各种数字图像锐化处理算法的方法和技术,包括其优点、局限性以及在不同场景下的应用情况,以确保对算法的全面了解。
-
实现并描述数字图像锐化算法:实际实现数字图像锐化处理算法,通过编程或模拟等方式,将理论知识转化为实际操作,强调实施过程中的关键步骤和技术要点。
-
分析数字图像锐化实验结果:对实验结果进行系统分析,评估不同算法在图像锐化中的表现,提取关键性能指标,为进一步优化算法或在特定应用中选择合适算法提供依据。
🌍二、研究环境
MATLAB R2022a的安装:
- 背景: MATLAB是一种高级的数值计算软件,广泛应用于工程、科学和其他领域。
- 目的: 在研究中使用MATLAB进行数值计算、图像处理等操作,以支持实验和数据分析。
- 操作: 详细描述安装MATLAB R2022a的步骤,包括获取安装文件、系统要求和安装过程中可能的注意事项。
环境配置用于数字图像实验:
- 背景: 数字图像处理是现代科学研究中的重要组成部分,需要特定的环境配置以确保实验的成功运行。
- 目的: 为了支持数字图像实验,需要配置MATLAB环境,包括添加必要的工具箱、设置路径等。
- 操作: 详细描述配置环境的步骤,包括添加图像处理工具箱、检查依赖项,并确保MATLAB环境能够正确识别和处理数字图像文件。
🌍三、实验原理与方法
🌕3.1 拉普拉斯锐化
拉普拉斯算子是最简单的各向同性微分算子,一个二元图像函数 f(x,y) 的拉普拉斯变换定义为

因为任意阶微分都是线性操作,所以拉普拉搜变换也是一个线性操作。为了更适于数字图像处理,这一方程需要表示为离散形式。通过邻域处理有多种方法定义离散变换,考虑到有两个变量,在
方向上对二阶偏微分采用下列定义:

类似地,在 y 方向上为

二维拉普拉斯数字实现可由这两个分量相加得到:

由于拉普拉斯是一种微分算子,它的应用强调图像中灰度的突变和降低灰度慢变化的区域。这将产生一幅把图像中的浅灰色边线和突变点叠加到暗背景中的图像。将原始图像和拉普拉斯图像叠加在一起的简单方法可以保护拉普拉斯锐化处理的下过,同时又能复原背景信息。如果实用的定义具有负的中心系数,那么必须将原始图像减去经拉普拉斯变换后的图像而不是加上它,从而得到锐化的结果。所以我们使用拉普拉斯变换对图像增强的基本方法可表示为下式:

🌕3.2 梯度法锐化
在图像处理中,一阶微分是通过梯度法实现的。对于函数 f(x,y) ,在其坐标 (x,y) 上的梯度是通过如下二维列向量定义的:
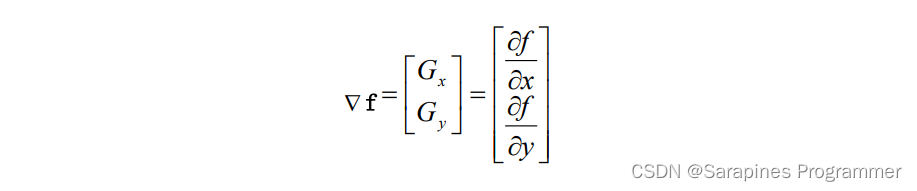
这个向量的模值由下式给出:

实际操作中,常用绝对值代替平方与开方运算近似求梯度的模值:

利用 3×3 的最小滤波掩模(如图1),在掩模中心使用绝对值并使用 3×3 掩模的近似结果为:

在 3×3 图像区域中,第三行与第一行的差接近于 x 方向上的微分,同样,第三列与第一列间的差接近于 y 方向上的微分。

🌍四、实验结果与分析
🌕4.1 拉普拉斯锐化
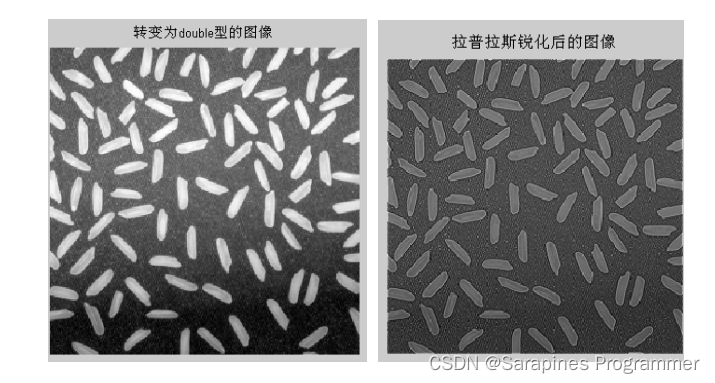
对图像rice.png进行拉普拉斯锐化,实验结果如图2:
分析:
图像显示了米粒的原图像和用拉普拉斯锐化后的图像。锐化后的图像比原图像更清晰,增强了灰度突变处的对比度,使图像中小的细节部分得到增强,并良好保留了图像的背景色调。
🌕4.2 梯度法锐化
对图像tire.tif进行梯度法锐化,实验结果如图3:
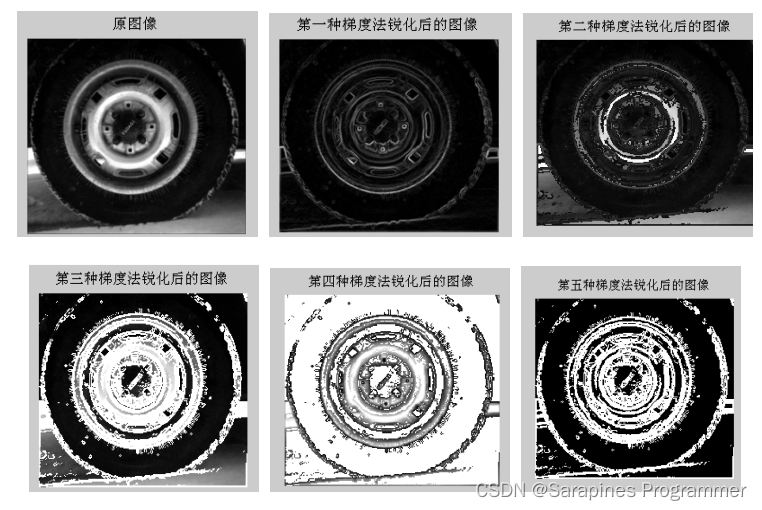
图3
分析:
图像显示了一幅轮胎的原始图像和经过一系列梯度锐化后得到的图像。图像中边缘缺陷清晰可见,但灰度不变或变化缓慢的底纹部分被去除了,梯度处理突出了小斑点,但它们在灰度图像中是看不到的。
🌍五、实验代码与思考
🌕5.1 实验代码
利用Matlab语言编写的数字图像处理的例程如下:
源码分析:
该代码展示了几种图像处理技术,包括均值滤波、中值滤波、频率域低通滤波以及逆滤波与维纳滤波的比较,代码详细解释如下:
1.均值滤波:
- 从文件中读取了一张灰度图像cameraman.tif并存储在变量I中。
- 使用imnoise函数向原图像I添加了椒盐噪声,生成了噪声图像J。
- 通过subplot函数创建一个2x3的图像网格,并在第一个子图中显示原图像I,在第二个子图中显示加噪声后的图像J。
- 使用不同大小的均值滤波器(3x3、5x5、7x7、9x9)对图像J进行滤波,得到k1、k2、k3和k4。
- 使用subplot函数在第三到第六个子图中显示滤波后的图像k1、k2、k3和k4。
2.中值滤波:
- 从文件中读取了一张灰度图像eight.tif并存储在变量I中。
- 使用imnoise函数向原图像I添加了椒盐噪声,生成了噪声图像J。
- 使用medfilt2函数对噪声图像J进行中值滤波处理,得到滤波后的图像K。
- 使用subplot函数创建一个1x2的图像网格,并在第一个子图中显示加噪声后的图像J,在第二个子图中显示中值滤波处理后的图像K。
3.频率域低通滤波:
- 从文件中读取了一张彩色图像coins.png并存储在变量I中。
- 使用imnoise函数向原图像I添加了高斯噪声,生成了带噪声的图像noisy。
- 将图像noisy转换为double类型。
- 对图像noisy进行二维傅里叶变换(fft2函数)得到频域表示的复数图像F。
- 使用fftshift函数将频域图像F进行平移,使得低频分量位于图像中心。
- 定义一些滤波器的参数,包括截断频率Dcut、低通滤波器的截止频率D0和D1。
- 使用嵌套的循环遍历频域图像F的每个频率点,并计算对应的频率距离D(u,v)。
- 根据不同的滤波器类型(理想低通、巴特沃斯低通、指数低通、梯形低通),计算每个频率点的滤波器响应值,并存储在相应的滤波器数组(IDEALH、BUTTERH、EXPOTH、TRAPEH)中。
- 将频率域图像F与各个滤波器响应数组进行点乘操作,得到滤波后的频率域图像(IDEALG、BUTTERG、EXPOTG、TRAPEG)。
- 对滤波后的频率域图像进行逆傅里叶变换(ifft2函数),得到空域中的滤波图像(IDEALfiltered、BUTTERfiltered、EXPOTfiltered、TRAPEfiltered)。
- 使用abs函数计算滤波图像的幅值。
- 使用figure和imshow函数分别显示理想低通滤波、巴特沃斯低通滤波、指数低通滤波和梯形低通滤波处理后的图像。
4.逆滤波与维纳滤波比较:
- 创建一个棋盘格图像F。
- 使用fspecial函数创建一个运动模糊的点扩散函数(PSF)。
- 使用imfilter函数对原图像F进行运动模糊处理,得到模糊图像MF。
- 创建一个与F大小相同的零矩阵,并使用imnoise函数向其添加高斯噪声,得到带噪声的图像MFN。
- 计算噪声功率谱密度与信号功率谱密度的比值(NSR)。
- 使用deconvwnr函数进行逆滤波,并使用imshow函数显示逆滤波后的图像。
- 使用带有NSR参数的deconvwnr函数进行维纳滤波,并使用imshow函数显示维纳滤波后的图像。
🌕5.2 实验思考
数字图像锐化处理的目的是什么?试写出相应的程序设计步骤。
1.数字图像锐化处理的目的是什么
数字图像锐化处理的目的是增强图像的边缘和细节,使其看起来更清晰、更鲜明。锐化处理通过增强图像的高频信息,使得边缘更加明显,细节更加突出,从而改善图像的视觉质量和观感。以下是数字图像锐化处理的主要目的包括:
- 提高图像清晰度:锐化处理可以增强图像的边缘和细节,使得图像看起来更加清晰。在一些模糊或者不够清晰的图像中,锐化处理可以使得物体边缘更加清晰,细节更加可见。
- 强调图像边缘:锐化处理可以增强图像的边缘对比度,使得边缘更加鲜明。这有助于突出图像中的物体边界,使得物体轮廓更加清晰,增强了图像的结构感。
- 增强细节信息:锐化处理可以使得图像中的细节更加明显。例如,对于一幅肖像照片,锐化处理可以使得人物的皮肤纹理、眼睛的亮度和眉毛的细节更加突出。
- 改善图像印刷或显示效果:在印刷和显示领域,锐化处理可以增强图像的清晰度和对比度,从而改善打印品质量或显示效果。锐化处理可以使得印刷品或者显示屏幕上的文字、图标和图像更加清晰可辨,提高视觉效果。
2.相应的程序设计步骤
数字图像锐化处理的程序设计步骤可以包括以下几个阶段,涵盖了预处理、锐化处理和后处理等关键步骤:
- 加载图像:从文件或其他数据源加载待处理的数字图像。图像可以表示为矩阵或多维数组,其中每个元素代表图像的像素值。
- 图像预处理:在进行锐化处理之前,可以进行一些预处理操作,例如灰度化、降噪或对比度增强等。这些预处理步骤可以根据具体的应用需求进行选择。
- 锐化滤波器设计:选择合适的锐化滤波器或卷积核。常见的锐化滤波器包括拉普拉斯滤波器、Sobel滤波器、Prewitt滤波器等。这些滤波器通过卷积操作来增强图像的边缘和细节。
- 图像卷积:将选定的锐化滤波器应用于图像。卷积操作是通过滑动滤波器窗口在图像上进行局部计算,将滤波器与图像的相应像素值相乘并求和,从而得到锐化后的像素值。卷积操作可以在整个图像上进行迭代,以获得整体的锐化效果。
- 锐化增强:将锐化滤波器的输出与原始图像进行组合,以增强图像的边缘和细节。可以通过将锐化滤波器的输出与原始图像进行加权相加或者相减来实现增强效果。
- 后处理:进行必要的后处理操作以优化图像的视觉效果。例如,可以应用灰度范围调整、对比度增强或者直方图均衡化等技术来改善图像的质量。
- 显示或保存结果:将处理后的图像显示在屏幕上或保存到文件中,以供进一步分析、应用或分享。
🌍六、研究感悟
-
数字图像锐化处理算法原理的掌握与熟悉:
- 通过实验,深入学习了数字图像锐化处理的算法原理,涉及了多种常见方法,包括均值滤波、中值滤波、频率域低通滤波、逆滤波和维纳滤波。
- 掌握这些算法原理为深入理解数字图像处理提供了基础,为后续实际应用和优化奠定了基础。
-
均值滤波和中值滤波的效果与调整:
- 实验结果显示均值滤波和中值滤波对去除椒盐噪声有一定效果。通过调整滤波器大小,平衡了去噪和细节保留的效果。
- 随着模板大小的增加,滤波效果更加明显,但也会伴随着图像细节的损失。
-
频率域低通滤波的原理与多种滤波器的比较:
- 介绍了频率域低通滤波的基本原理,并使用了理想、巴特沃思、指数和梯形低通滤波器。这些滤波器通过调整频率响应的大小来控制滤波程度。
- 低通滤波有效降低了高频噪声,但也引起了一定程度的图像模糊。
-
逆滤波与维纳滤波的比较:
- 实验中对逆滤波和维纳滤波进行了比较,发现逆滤波容易放大噪声,而维纳滤波通过估计噪声功率谱权衡信号和噪声,更好地恢复图像细节。
- 维纳滤波在处理噪声时表现更为出色,是一种更可行的选择,能够同时保护图像细节。
📝总结
数字图像处理领域如同一片未被探索的数码大陆,引领你勇敢涉足视觉科技的神秘领域。学习之旅同样是一场不同寻常的冒险,从基础概念到环境配置,逐步揭示更深层次的图像分析、算法实现和视觉智能的奥秘。
渴望挑战数字图像处理的学习路径和征服图像领域的技术?不妨点击下方链接,加入我们的社群,一同探讨更多视觉奇迹吧。我们推出了引领趋势的📸 系列专栏:,旨在深度探索数字图像处理技术的实际应用和创新。🌟🖼️



- 点赞
- 收藏
- 关注作者
评论(0)