自动驾驶传感器技术

自动驾驶传感器技术是自动驾驶系统的关键组成部分,它使车辆能够感知并理解周围环境。本文将深入探讨自动驾驶传感器技术,包括常见类型、工作原理以及它们在自动驾驶中的作用。
1. 摄像头

摄像头的工作原理
摄像头是基于光学原理的传感器,其工作原理基于以下过程:
-
光学透镜: 摄像头的前部有一个透镜,它负责捕捉光线并将其聚焦在摄像头传感器上。
-
图像传感器: 图像传感器是摄像头的核心组成部分,通常是一块芯片。它包含许多小的光敏元件,称为像素。每个像素负责测量特定区域的光强度。
-
光线捕捉: 当光线穿过透镜并照射到图像传感器上时,像素将测量光线的强度。不同强度的光线创建了图像中不同部分的亮度和颜色。
-
数据处理: 通过测量每个像素的光强度,图像传感器将光学信息转换为数字图像数据。这些数据可以表示为像素阵列,每个像素都有一个与其亮度和颜色相关的数值。
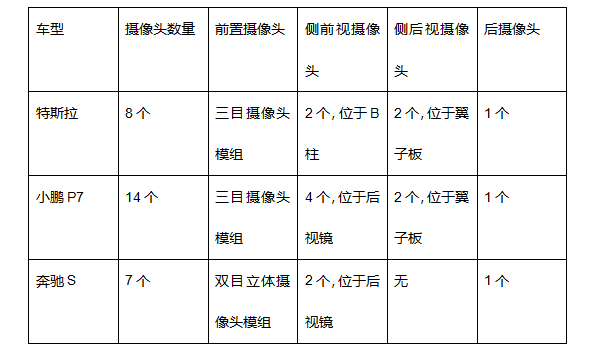
摄像头的种类
在自动驾驶领域,有几种不同类型的摄像头,用于不同的用途:
-
单目摄像头: 单目摄像头只有一个透镜和一个图像传感器。它们通常用于捕捉前方的道路图像,但缺乏深度感知能力。
-
立体摄像头: 立体摄像头由两个摄像头组成,模拟人类的双眼视觉。这种摄像头能够提供深度信息,有助于识别距离和三维结构。
-
鱼眼摄像头: 鱼眼摄像头使用广角透镜捕捉大范围的图像,适用于全景感知和环境监测。
-
红外摄像头: 红外摄像头能够捕捉红外光谱范围的图像,用于夜间和低光环境下的感知。
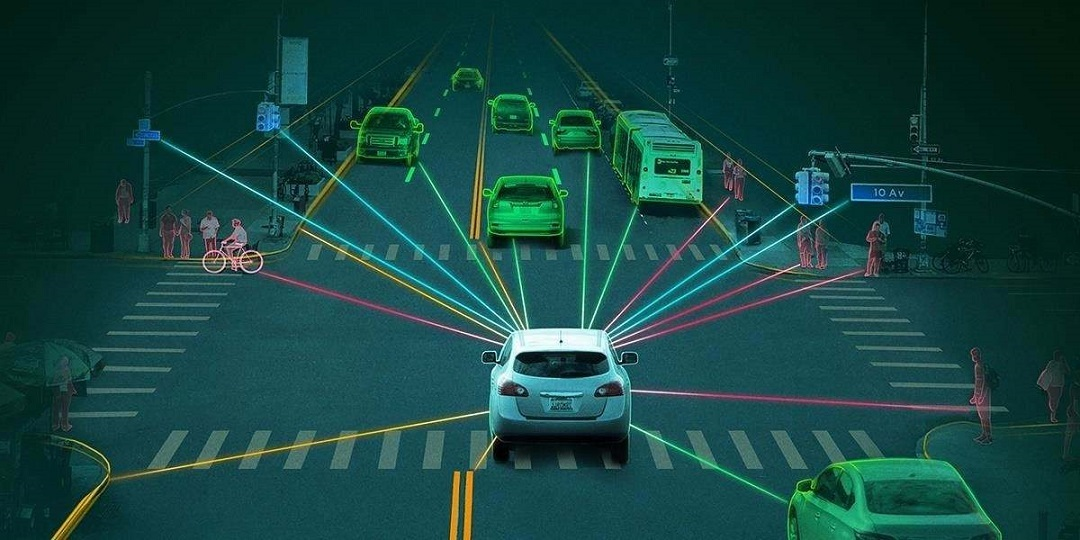
摄像头在自动驾驶中的作用
摄像头在自动驾驶系统中扮演了关键的角色,具体作用如下:
-
视觉感知: 摄像头用于捕捉车辆周围的视觉信息,包括道路、车辆、行人、道路标志和交通信号等。这些信息对于实时感知和决策至关重要。
-
对象识别: 通过计算机视觉技术,摄像头可以帮助自动驾驶系统识别和分类各种对象,如其他车辆、行人和障碍物。这有助于规划安全的驾驶路径。
-
车道保持: 摄像头可以监测车辆在道路上的位置,帮助自动驾驶系统维持车辆在正确的车道上行驶。
-
交通信号识别: 摄像头可以检测和识别交通信号、标志和路牌,以确保车辆遵循交通规则。
-
目标跟踪: 摄像头可以跟踪其他车辆和行人的运动,以预测它们的行为并采取适当的驾驶决策。
总之,摄像头在自动驾驶中起到了关键的感知作用,使车辆能够了解周围环境并做出智能决策。通过不断改进图像处理算法和传感器技术,摄像头在自动驾驶系统中的作用将变得越来越重要。
2. 雷达
雷达的工作原理
雷达(Radar,即Radio Detection and Ranging)是一种使用电磁波进行远距离感知和定位的技术。其工作原理基于以下基本原理:
-
发射信号: 雷达系统会发射一束电磁波(通常是微波或毫米波),这些波束传播到周围的环境中。
-
接收反射信号: 一旦电磁波遇到物体,它们会被反射回雷达系统。
-
测量时间延迟: 雷达系统会测量发射信号和反射信号之间的时间延迟,也称为往返时间。
-
计算距离: 通过知道电磁波的传播速度(等于光速),雷达可以计算出物体到雷达系统的距离,通过以下公式计算:距离 = (速度 x 时间延迟) / 2。
-
分析反射强度: 雷达还可以测量反射信号的强度,这有助于确定物体的大小和形状。
雷达的种类
在自动驾驶领域,存在不同类型的雷达,用于不同的应用和距离范围:
-
毫米波雷达: 毫米波雷达使用毫米波段的电磁波,通常在76 GHz到81 GHz的频率范围内。它们适用于中短距离感知,如障碍物检测和自适应巡航控制。
-
长距离雷达: 长距离雷达通常工作在更低的频率范围,如24 GHz到40 GHz,以便在远距离上探测目标。它们用于检测远处的车辆和物体,帮助车辆规划安全路径。
-
立体雷达: 立体雷达由多个雷达传感器组成,通常位于车辆的前部和后部。它们用于创建环绕车辆的三维感知,帮助车辆感知和跟踪其他车辆的位置和速度。
雷达在自动驾驶中的作用
雷达在自动驾驶系统中扮演着关键的角色,具体作用如下:
-
远距离感知: 雷达可以检测远距离上的车辆、行人和障碍物,有助于车辆及时采取避障措施。
-
速度测量: 通过测量目标的速度,雷达可以帮助自动驾驶系统预测其他车辆的行为,从而更好地规划驾驶路径。
-
障碍物检测: 雷达可以检测前方的障碍物,包括静态物体和运动物体,以避免碰撞。
-
夜间和恶劣天气下的感知: 与视觉传感器不同,雷达不受光线条件的限制,因此在夜间和恶劣天气条件下仍能工作良好。
-
数据融合: 雷达数据通常与其他传感器数据(如摄像头和激光雷达)结合使用,以提供全面的环境感知。
总之,雷达是自动驾驶系统中不可或缺的一部分,它提供了远距离感知和可靠的物体检测能力,有助于确保车辆在复杂的交通环境中安全行驶。通过不断改进雷达技术和数据处理算法,自动驾驶车辆的感知和决策能力将得到进一步提升。
3. 激光雷达 (LiDAR)

激光雷达的工作原理
激光雷达的工作原理基于光的传播和反射原理:
-
激光发射: 激光雷达通过发射非可见激光束(通常是红外激光)来测量物体。这束激光光束以非常高的速度传播。
-
光线反射: 激光束遇到物体后会被反射回激光雷达。
-
测量时间延迟: 激光雷达测量发射激光束和反射激光束之间的时间延迟(往返时间)。
-
计算距离: 通过知道光的速度(光速)以及往返时间,激光雷达可以准确计算物体到雷达的距离。
-
激光束扫描: 激光雷达通常会以旋转或者以其他方式扫描激光束,从而生成物体的三维点云图,包含了物体的位置和形状。
激光雷达的类型
有不同类型的激光雷达,它们具有不同的工作原理和性能特点:
-
机械式激光雷达: 机械式激光雷达通过机械装置旋转激光传感器来扫描周围环境。这种类型通常拥有较高的分辨率和测量精度。
-
固态激光雷达: 固态激光雷达采用固定的传感器头,它们使用电子控制来改变激光束的方向。它们通常更紧凑,更耐用,但分辨率可能较低。
-
多光束激光雷达: 这种类型的激光雷达同时发射多个激光束,以加快扫描速度和提高点云密度。
-
固态光学雷达: 这种新兴的技术不使用机械部件,而是依靠微光学元件来扫描激光束,具有更小的体积和更快的响应速度。
激光雷达在自动驾驶中的作用
激光雷达在自动驾驶系统中具有关键作用,包括:
-
高精度的距离测量: 激光雷达提供高精度的距离测量,使车辆能够准确地感知周围环境中的障碍物、其他车辆和道路结构。
-
三维环境感知: 通过生成三维点云地图,激光雷达使车辆能够了解周围环境的三维结构,有助于识别物体并进行路径规划。
-
低光和恶劣天气下的稳定性: 激光雷达不受光照条件的限制,因此在夜间、雨雪和浓雾等恶劣天气下表现出色。
-
障碍物检测和避免: 激光雷达能够检测和跟踪障碍物的位置和运动,帮助车辆规划避障路径。
-
数据融合: 激光雷达数据通常与其他传感器数据(如摄像头和雷达)结合使用,以提供全面的环境感知。
总之,激光雷达在自动驾驶中扮演了关键的角色,提供了高精度、可靠的环境感知数据,有助于确保车辆在各种复杂的道路和天气条件下安全行驶。随着激光雷达技术的不断发展和改进,自动驾驶系统将变得更加智能和可靠。
4. 超声波传感器
超声波传感器的工作原理
超声波传感器的工作原理基于声波的传播和回声原理:
-
声波发射: 超声波传感器会发射高频率声波(通常在20 kHz到65 kHz之间),这些声波传播到周围的环境中。
-
声波反射: 当声波遇到物体时,它们会被反射回传感器。
-
测量时间延迟: 超声波传感器测量发射声波和反射声波之间的时间延迟(往返时间)。
-
计算距离: 通过知道声波在空气中的传播速度(约为343米/秒),传感器可以准确计算物体到传感器的距离,使用以下公式:距离 = (速度 x 时间延迟) / 2。
超声波传感器的种类
有几种不同类型的超声波传感器,用于不同的应用:
-
单发射单接收(1S1R)超声波传感器: 这种传感器只有一个发射器和一个接收器,主要用于测量距离。
-
单发射多接收(1S多R)超声波传感器: 这种传感器包含一个发射器和多个接收器,可以提高距离测量的准确性和稳定性。
-
多发射多接收(多S多R)超声波传感器: 这种传感器包括多个发射器和多个接收器,可用于检测多个方向的障碍物。
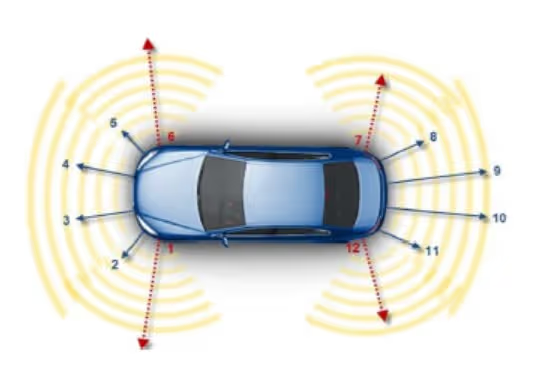
超声波传感器在自动驾驶中的作用
超声波传感器在自动驾驶系统中具有多种作用,包括:
-
近距离感知: 超声波传感器通常用于近距离感知,如停车、泊车和低速驾驶。它们可以检测车辆周围的障碍物,以帮助避免碰撞。
-
停车辅助: 在停车或泊车时,超声波传感器可以提供准确的距离测量,以确保车辆停在正确的位置。
-
低速驾驶辅助: 超声波传感器还可用于在低速驾驶时检测前方的障碍物,帮助车辆避免碰撞。
-
辅助自动驾驶: 在某些自动驾驶系统中,超声波传感器可以与其他传感器(如摄像头和雷达)结合使用,以提供全面的环境感知。
-
停车和起步: 超声波传感器还可以用于帮助车辆进行平稳的停车和起步,尤其是在拥挤的交通情况下。
虽然超声波传感器主要用于近距离感知,但它们在低速驾驶和精确定位方面具有重要作用。通过将超声波传感器与其他传感器技术整合,自动驾驶系统能够在各种交通和停车场景中更加智能地操作。
5. GPS和IMU
全球定位系统(GPS)和惯性测量单元(IMU)是自动驾驶系统中用于定位和导航的重要传感器和技术。
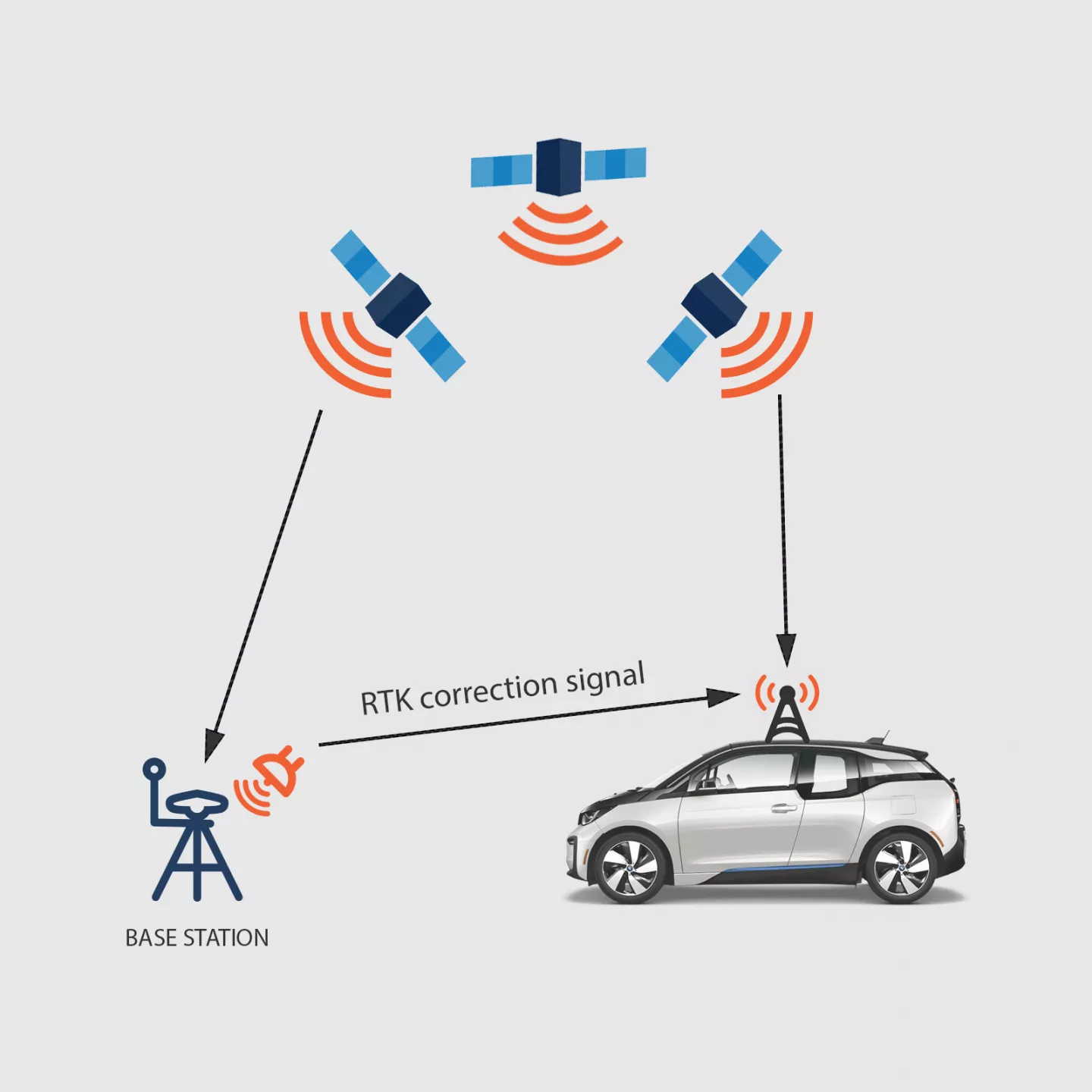
GPS(全球定位系统)
GPS是一种卫星导航系统,由美国政府维护和控制,用于确定地球上任何点的精确三维位置。GPS工作原理如下:
-
卫星定位: GPS系统由一组卫星组成,它们在地球轨道上运行。这些卫星发射连续的无线电信号,包含卫星的精确位置和时间信息。
-
接收GPS信号: GPS接收器(通常是车辆上的GPS天线和接收器)接收来自多颗卫星的信号。接收器可以同时接收多颗卫星的信号。
-
三角测量: GPS接收器根据来自不同卫星的信号和每颗卫星的已知位置,通过三角测量法计算出接收器的精确位置(纬度、经度和海拔高度)。
-
数据融合: 为了提高精度和可靠性,GPS通常与其他传感器数据(如IMU、激光雷达和地图数据)一起使用。数据融合技术可帮助处理GPS信号中的误差和不确定性,以提供更准确的定位信息。
GPS的优势包括全球范围内的覆盖和相对较高的精度。然而,它可能在高楼大厦、山脉、森林覆盖等情况下受到信号遮挡,因此需要与其他传感器一起使用,以获得更可靠的定位信息。
IMU(惯性测量单元)
IMU是一种传感器组合,通常包括加速度计和陀螺仪,用于测量车辆的运动状态和方向。IMU的工作原理如下:
-
加速度计: 加速度计测量车辆的加速度,即速度的变化率。通过积分加速度数据,可以计算车辆的速度和位移。
-
陀螺仪: 陀螺仪测量车辆的旋转速度和方向。通过积分陀螺仪数据,可以计算车辆的方向和角度。
-
数据融合: IMU通常与其他传感器数据(如GPS和激光雷达)一起使用,以提供全面的车辆定位和导航信息。数据融合算法可将不同传感器的数据整合在一起,以减少误差和提高精度。
IMU的优势包括实时性强、对信号遮挡不敏感以及在短时间内提供高频率的运动信息。然而,IMU也存在累积误差的问题,因此需要定期校准和数据融合来提高精度。
GPS和IMU在自动驾驶中的作用
GPS和IMU在自动驾驶系统中扮演了关键的角色,具体作用如下:
-
全球定位和导航: GPS提供了车辆的全球位置信息,而IMU提供了车辆的运动状态信息。结合使用,它们支持车辆的全球定位和导航。
-
车辆定位: GPS和IMU一起用于确定车辆的精确位置、方向和速度,以便进行路径规划和控制。
-
地图匹配: 通过将GPS和IMU数据与高精度地图进行匹配,自动驾驶系统可以更准确地定位车辆,并在复杂城市环境中进行导航。
-
姿态估计: IMU数据用于估计车辆的姿态(即倾斜和旋转角度),这对于控制车辆的稳定性和安全性至关重要。
总之,GPS和IMU是自动驾驶系统中不可或缺的传感器技术,它们提供了车辆的定位、导航和运动状态信息,有助于实现安全、高效和精确的自动驾驶。通过数据融合和算法改进,这些传感器可以提供更可靠的车辆定位和导航性能。
总结
自动驾驶传感器技术的整合和数据融合是自动驾驶系统的核心挑战之一。通过将不同类型的传感器数据整合在一起,车辆可以建立对周围环境的全面理解,并做出相应的决策和控制操作。这些传感器技术的不断创新和改进将为实现更安全、高效和可靠的自动驾驶交通做出贡献。

- 点赞
- 收藏
- 关注作者
评论(0)