Linux多线程同步机制(下)

【摘要】 @TOC 前言 一、读写锁多线程同步机制中的读写锁(Read-Write Lock)是一种特殊的锁机制,用于控制对共享资源的读写访问。读写锁允许多个线程同时读取共享资源,但在写操作时需要独占访问。读写锁的基本原则是:多个线程可以同时获取读锁,但只有一个线程可以获取写锁。当有线程持有写锁时,其他线程无法获取读锁或写锁,直到写操作完成并释放写锁。读写锁有两种状态:读模式下加锁状态(读锁),写模式...
@TOC
前言
一、读写锁
多线程同步机制中的读写锁(Read-Write Lock)是一种特殊的锁机制,用于控制对共享资源的读写访问。读写锁允许多个线程同时读取共享资源,但在写操作时需要独占访问。
读写锁的基本原则是:多个线程可以同时获取读锁,但只有一个线程可以获取写锁。当有线程持有写锁时,其他线程无法获取读锁或写锁,直到写操作完成并释放写锁。
读写锁有两种状态:读模式下加锁状态(读锁),写模式下加锁状态(写锁)。读写锁只有一把。
1. 读写锁的特性: 写独占,读共享。
- 读写锁是 “ 写模式加锁 ” 时,解锁前,所有对该锁加锁的线程都会被阻塞。
- 读写锁是 “ 读模式加锁 ” 时,如果线程以读模式 则对其加锁会成功;如果线程是以写模式加锁会阻塞。
- 读写锁是 “ 读模式加锁 ” 时,既有试图以写模式加锁的线程,也有试图以读模式加锁的线程。那么读写锁会阻塞读模式请求。优先满足写模式加锁。
读写锁并行阻塞,写锁优先级高。
2. 读写锁相关函数:
- 初始化,pthread_rwlock_init。
- 获取读锁:使用pthread_rwlock_rdlock函数获取读锁。
- 获取写锁:使用pthread_rwlock_wrlock函数获取写锁。
- 释放锁:使用pthread_rwlock_unlock函数释放读锁或写锁。
- 销毁读写锁:在不再需要时,使用pthread_rwlock_destroy函数销毁读写锁。
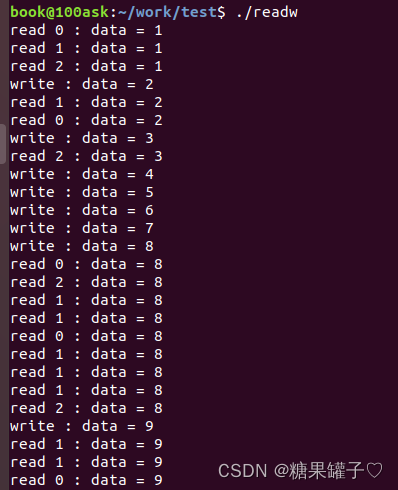
==3. 示例代码:==
下面代码设置一个写进程 和 三个读进程区访问共享资源。
(void*)i 将整数 i 转换为 void* 类型。在线程的函数中,需要将其转换回整数类型,以便使用它。可以使用 (int)arg 将 void* 转换回 int 类型。void* 是一种通用的泛型指针,可以在不关心具体类型的情况下进行转换和操作。
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <time.h>
#include <unistd.h>
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER; // 初始化读写锁
int data = 1;
void *write_thread (void *arg)
{
while(1)
{
pthread_rwlock_wrlock(&rwlock);
data += 1;
printf("write : data = %d\n",data);
pthread_rwlock_unlock(&rwlock);
sleep(rand() %3); // 随机休眠,让出 cpu资源
}
pthread_exit(NULL);
}
void *read_thread (void *arg)
{
int i = (int )arg;
while(1)
{
pthread_rwlock_rdlock(&rwlock);
printf("read %d : data = %d\n",i, data);
pthread_rwlock_unlock(&rwlock);
sleep(rand() %3);
}
pthread_exit(NULL);
}
int main(void)
{
pthread_t r_tid[5], w_tid;
srand(time(NULL));
// 创建多个读线程
for (int i = 0; i < 3; i++)
{
pthread_create(&r_tid[i], NULL, read_thread, (void*)i);
}
pthread_create(&w_tid, NULL, write_thread, NULL);
for(int j=0;j<3;j++)
pthread_join(r_tid[j],NULL);
pthread_join(w_tid,NULL);
pthread_rwlock_destroy(&rwlock);
return 0;
}
二、条件变量
在多线程编程中,条件变量是一种用于线程之间进行通信和同步的机制。条件变量允许一个线程等待特定的条件发生,并在条件满足时通知其他线程继续执行。条件变量本身不是锁。条件变量常与互斥锁(mutex)结合使用,以实现线程之间的同步操作。
1. 相关函数:
(1) 对条件变量进行初始化,并可指定属性。通常使用默认属性,可以传入 NULL。
int pthread_cond_init(pthread_cond_t *cond, const pthread_condattr_t *attr);
(2) 销毁条件变量,释放相关资源。
int pthread_cond_destroy(pthread_cond_t *cond);
- 当前线程等待条件变量满足,并释放关联的互斥锁。该函数会阻塞线程直至条件变量被通知。
在调用 pthread_cond_wait() 之前,必须先获得与条件变量关联的互斥锁 mutex 的锁,然后该函数会自动释放 mutex 的锁(自动 unlock),并让线程进入等待状态,直到被另一个线程通过 pthread_cond_signal() 或 pthread_cond_broadcast() 唤醒(自动 lock)。
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex);
(3) 通知等待在条件变量上的一个线程,使其继续执行。如果有多个线程等待,只通知其中一个线程。
int pthread_cond_signal(pthread_cond_t *cond);
(4) 通知所有等待在条件变量上的线程,使它们都继续执行。
int pthread_cond_broadcast(pthread_cond_t *cond) ;
==2. 示例代码:==
描述生产者 和 消费者的关系。
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
struct msg
{
int num;
struct msg* pnext;
};
struct msg *head = NULL;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
void *producer_thread (void *arg) // 生产者线程
{
while(1)
{
struct msg *info = malloc(sizeof(struct msg));
info->num = rand() % 1000 + 1;
pthread_mutex_lock(&mutex);
info->pnext = head;
head = info;
pthread_mutex_unlock(&mutex);
// 唤醒阻塞的线程
pthread_cond_signal(&cond);
printf("--------------------- producer : %d\n",info->num);
sleep(rand() % 3);
}
return NULL;
}
void *customer_thread (void *arg) // 消费者线程
{
while(1)
{
struct msg *info;
pthread_mutex_lock(&mutex);
if(head == NULL)
{
pthread_cond_wait(&cond, &mutex); // 阻塞线程,等待有数据。
}
info = head;
head = info->pnext;
pthread_mutex_unlock(&mutex);
printf("customer : =============== %d\n",info->num);
free(info);
info = NULL;
sleep(rand() % 3);
}
return NULL;
}
int main(void)
{
pthread_t pid,cid;
srand(time(NULL)); // 设置随机种子
int ret = pthread_create(&pid, NULL, producer_thread, NULL);
if(ret != 0)
{
printf("prodecer_thread_create error\n");
}
ret = pthread_create(&cid, NULL, customer_thread, NULL);
if(ret != 0)
{
printf("consumer_thread_create error\n");
}
pthread_join(pid, NULL); // 等待回收线程,获取退出线程的状态
pthread_join(cid, NULL);
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
return 0;
}
总结

【版权声明】本文为华为云社区用户原创内容,未经允许不得转载,如需转载请自行联系原作者进行授权。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)