二叉树的顺序结构——堆的概念&&实现(图文详解+完整源码 | C语言版)


![]()
目录
0.写在前面
上一章中介绍了树和二叉树的概念及结构,本章我们将学习堆的实现。其中涉及若干树和二叉树的概念,如需查看,请点击链接跳转。
想要学会二叉树?树的概念与结构是必须要掌握的!快进来看看吧![]() http://t.csdn.cn/GWQJy
http://t.csdn.cn/GWQJy
1.什么是堆?
堆是一种完全二叉树。只不过堆是二叉树顺序结构的实现,说白了就是将一个数组看作二叉树。也就是说,堆的逻辑结构是一棵二叉树,存储结构是数组。
堆又分为大堆和小堆:
大堆:树中所有父亲都大于等于孩子;
小堆:树中所有父亲都小于等于孩子。
注意,不满足这两点的二叉树不能称为堆(这点很重要)。

![]()
2.堆的实现
2.1 堆的结构定义
typedef int HPDataType;
typedef struct Heap
{
HPDataType* a; //存储数据
int size; //堆有效数据的大小
int capacity; //堆的容量
}Heap;
上文讲到,堆其实就是二叉树的顺序结构实现,所以用一个数组来存储数据。
2.2 函数声明
//给出一个数组,对它进行建堆
void HeapCreate(Heap* php, HPDataType* a, int n);
//堆的初始化
void HeapInit(Heap* php);
//对申请的内存释放
void HeapDestroy(Heap* php);
//添加数据
void HeapPush(Heap* php, HPDataType data);
//删除数据
void HeapPop(Heap* php);
//向上调整算法
void AdjustUp(HPDataType* a, int child);
//向下调整算法
void AdjustDown(HPDataType* a, int n, int parent);
//打印堆的数据
void HeapPrint(Heap* php);
//判断堆是否为空
bool HeapEmpty(Heap* php);
//返回堆的大小
int HeapSize(Heap* php);
//返回堆顶的数据
HPDataType HeapTop(Heap* php);
//交换函数
void Swap(HPDataType* p1, HPDataType* p2);2.3 函数实现
由于堆的实现所用函数较多,这里就挑其中最难也是最重要的进行说明。
2.3.1 AdjustUp(向上调整算法)
当我们要实现在HeapPush(堆中添加数据data时),我们的做法是先将data插入到堆的尾部,再将data进行向上调整,直到它到达合适的位置。
如图,假设现在要将data=60添加到下面这个大堆中。

![]()
第一步,将60插入到堆的末尾,即数组的末尾。

![]()
第二步,比较60与它父亲节点的大小。因为要保证插入数据之后堆仍然是大堆,所以如果60大于父亲,则交换位置。

![]()
第三步,继续比较60与父亲的值,若大于父亲则交换位置。

![]()
至此,60已经到它正确的位置上了。
以上就是向上调整的过程,来看看代码实现。
void AdjustUp(HPDataType* a, int child)
{
int parent = (child - 1) / 2;
while (child > 0)
{
//建大堆用'>',小堆用'<'
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
void HeapPush(Heap* php, HPDataType data)
{
assert(php);
//如果容量不足就扩容
if (php->size == php->capacity)
{
int newCapacity = php->capacity == 0 ? 4 : php->capacity * 2;
HPDataType* tmp = (HPDataType*)realloc(php->a, sizeof(HPDataType)*newCapacity);
if (tmp == NULL)
{
perror("realloc fail");
exit(-1);
}
php->a = tmp;
php->capacity = newCapacity;
}
//添加数据
php->a[php->size] = data;
php->size++;
//将新入堆的data进行向上调整
AdjustUp(php->a, php->size-1);
}2.3.2 AdjustDown(向下调整算法)
当我们要实现HeapPop(删除堆顶的数据)时,我们不能像往常的数组那样进行头删。因为数组再进行头删时,还要将从第二个位置起的后面的所有元素都向前平移。
但是堆这样行不通,因为随意挪动数据会造成关系的混乱。例如:
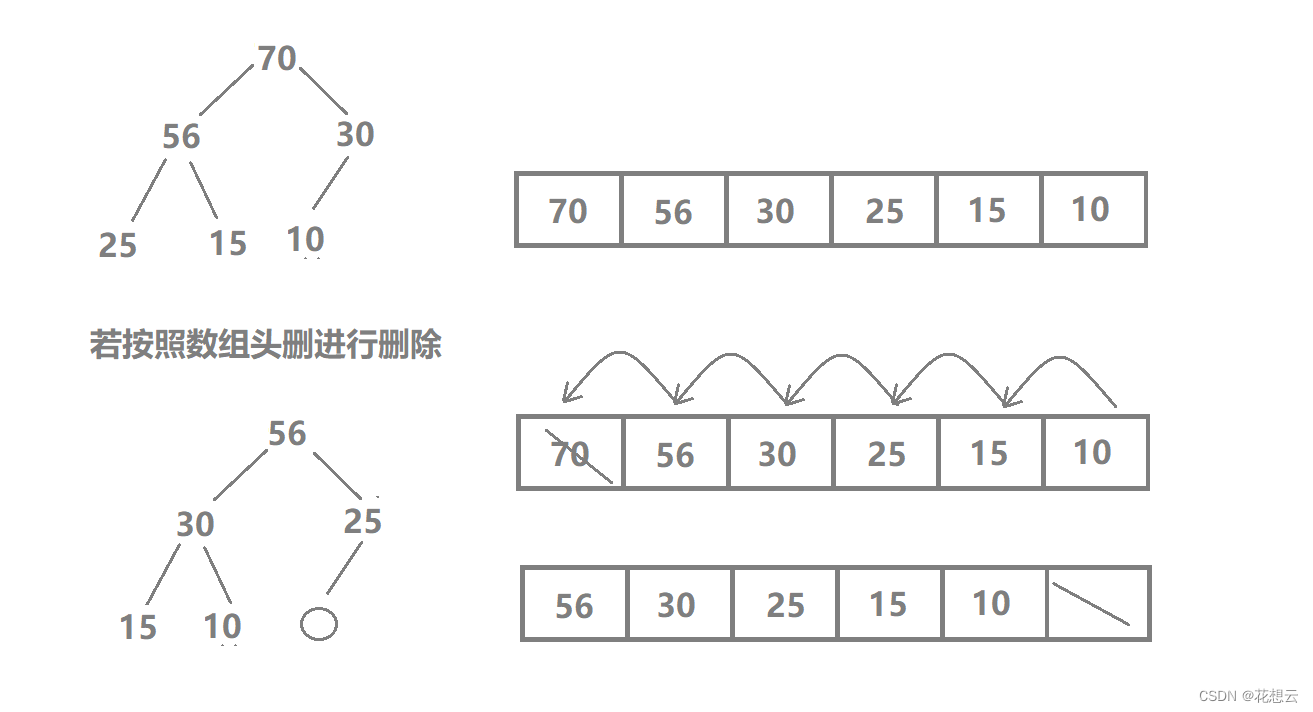
![]()
此时这个二叉树结构就不再是一个大堆了。
那么有什么好的办法不使堆的结构紊乱呢?这就得用到向下调整算法了。
例如,假设此时要删除堆顶的数据:
![]()
第一步,交换堆顶与堆尾的值,并将堆的Size--(相当于删除了末尾的元素)。

![]()
第二步,对45进行向下调整。找出45的两个孩子中值最大(是小堆就选小的)的那个,如果5小于该数字就与其进行交换。

![]()
循环此步骤,直至45到达正确的位置。
显然,此时情况较为简单,只用一步就到达了正确位置。(此时70已经不存在了,所以不用比较)
以上就是向下调整的过程,来看看代码的实现。
void AdjustDown(HPDataType* a, int n, int parent)
{
assert(a);
//先默认较大的为左孩子
int child = parent * 2+1;
while (child<n)
{
//如果右孩子比左孩子大,就++
if (a[child] < a[child + 1] && child + 1 < n)
{
child++;
}
//建大堆用'>',小堆用'<'
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void HeapPop(Heap* php)
{
assert(php);
assert(php->size>0);
//将堆顶的数据与堆尾交换
Swap(&php->a[0], &php->a[php->size - 1]);
php->size--;
//将此时堆顶的data向下调整
AdjustDown(php->a, php->size, 0);
}
特别注意:不管是向上调整还是向下调整,它们都得满足一个前提->
向上调整:进行向上调整的时候,该位置之前的所有数据已经是一个堆了。
向下调整:进行向下调整的时候,该位置的左子树和右子树都已经是堆了。
2.3.3 HeapCreate(如何建堆)
此函数所实现的功能是给出一个数组,对数组进行建堆(建大堆或者小堆)。
先来看看代码实现:
void HeapCreate(Heap* php, HPDataType* a, int n)
{
php->a = (HPDataType*)malloc(sizeof(HPDataType) * n);
if (php->a == NULL)
{
perror("malloc fail");
exit(-1);
}
//将数组的内容全部拷贝到php->a中
memcpy(php->a, a, sizeof(HPDataType) * n);
php->size = php->capacity = n;
//建堆算法
for (int i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(php->a, n, i);
}
}这里采用向下调整算法的的思路是,既然向下调整和向上调整都是有前提的,就不能直接进行使用。但是我们发现即使这个二叉树的数据是紊乱的,但是总有可以当作堆的一部分来使用向下调整(不用向上调整是因为不好控制)。例如:

![]()
在这个堆的底部(3个黑色圆圈里的部分)可以看作是堆,可以满足进行向下调整的条件。当把底层的三个堆建好以后,我们发现两个红色圆圈中的部分又可以看作满足条件的堆,对这两部分在进行向下调整。

![]()
完成之后,我们发现堆顶元素的左子树和右子树都已经是堆了,最后再将堆顶的元素进行向下调整,就建好一个完整的堆了。
总结起来就是如下图的步骤:

![]()
2.3.4 建堆的时间复杂度
因为堆是完全二叉树,而满二叉树也是完全二叉树,此处为了简化使用满二叉树来证明(时间复杂度本来看的就是近似值,多几个节点不影响最终结果):

![]()
因此,建堆的时间复杂度为O(N)。
3. 完整源码
Heap.h文件
#pragma once
#include<stdio.h>
#include<stdlib.h>
#include<assert.h>
#include<string.h>
#include<stdbool.h>
typedef int HPDataType;
typedef struct Heap
{
HPDataType* a; //存储数据
int size; //堆有效数据的大小
int capacity; //堆的容量
}Heap;
//给出一个数组,对它进行建堆
void HeapCreate(Heap* php, HPDataType* a, int n);
//堆的初始化
void HeapInit(Heap* php);
//对申请的内存释放
void HeapDestroy(Heap* php);
//添加数据
void HeapPush(Heap* php, HPDataType data);
//删除数据
void HeapPop(Heap* php);
//向上调整算法
void AdjustUp(HPDataType* a, int child);
//向下调整算法
void AdjustDown(HPDataType* a, int n, int parent);
//打印堆的数据
void HeapPrint(Heap* php);
//判断堆是否为空
bool HeapEmpty(Heap* php);
//返回堆的大小
int HeapSize(Heap* php);
//返回堆顶的数据
HPDataType HeapTop(Heap* php);
//交换函数
void Swap(HPDataType* p1, HPDataType* p2);
Heap.c文件
#define _CRT_SECURE_NO_DEPRECATE 1
#include"Heap.h"
void HeapCreate(Heap* php, HPDataType* a, int n)
{
php->a = (HPDataType*)malloc(sizeof(HPDataType) * n);
if (php->a == NULL)
{
perror("malloc fail");
exit(-1);
}
//将数组的内容全部拷贝到堆中
memcpy(php->a, a, sizeof(HPDataType) * n);
php->size = php->capacity = n;
//建堆算法
for (int i = (n - 1 - 1) / 2; i >= 0; i--)
{
AdjustDown(php->a, n, i);
}
}
void HeapInit(Heap* php)
{
assert(php);
php->a = NULL;
php->size = php->capacity = 0;
}
void HeapPrint(Heap* php)
{
assert(php);
for (int i = 0; i < php->size; i++)
{
printf("%d ", php->a[i]);
}
}
void HeapDestroy(Heap* php)
{
assert(php);
free(php->a);
php->a = NULL;
php->capacity = php->size = 0;
}
void HeapPush(Heap* php, HPDataType data)
{
assert(php);
//如果容量不足就扩容
if (php->size == php->capacity)
{
int newCapacity = php->capacity == 0 ? 4 : php->capacity * 2;
HPDataType* tmp = (HPDataType*)realloc(php->a, sizeof(HPDataType)*newCapacity);
if (tmp == NULL)
{
perror("realloc fail");
exit(-1);
}
php->a = tmp;
php->capacity = newCapacity;
}
//添加数据
php->a[php->size] = data;
php->size++;
//将新入堆的data进行向上调整
AdjustUp(php->a, php->size-1);
}
void HeapPop(Heap* php)
{
assert(php);
assert(php->size>0);
//将堆顶的数据与堆尾交换
Swap(&php->a[0], &php->a[php->size - 1]);
php->size--;
//将此时堆顶的data向下调整
AdjustDown(php->a, php->size, 0);
}
void AdjustDown(HPDataType* a, int n, int parent)
{
assert(a);
//先默认较大的为左孩子
int child = parent * 2+1;
while (child<n)
{
//如果右孩子比左孩子大,就++
if (a[child] < a[child + 1] && child + 1 < n)
{
child++;
}
//建大堆用'>',小堆用'<'
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
parent = child;
child = parent * 2 + 1;
}
else
{
break;
}
}
}
void AdjustUp(HPDataType* a, int child)
{
int parent = (child - 1) / 2;
while (child > 0)
{
//建大堆用'>',小堆用'<'
if (a[child] > a[parent])
{
Swap(&a[child], &a[parent]);
child = parent;
parent = (child - 1) / 2;
}
else
{
break;
}
}
}
HPDataType HeapTop(Heap* php)
{
assert(php);
assert(php->size>0);
return php->a[0];
}
int HeapSize(Heap* php)
{
assert(php);
return php->size;
}
bool HeapEmpty(Heap* php)
{
assert(php);
return !php->size;
}
void Swap(HPDataType* p1, HPDataType* p2)
{
HPDataType tmp = *(p1);
*(p1) = *(p2);
*(p2) = tmp;
}Test.c文件
至此,本章的内容就结束了,下一章将进行堆的实际应用——堆排序以及TopK问题的说明。

- 点赞
- 收藏
- 关注作者
评论(0)