AIGC背后的技术分析 | 使用光流法进行人脸追踪

01、背景知识
1●光流法
目前,光流(optical flow)法是运动图像分析的重要方法之一,它是由James J. Gibson于20世纪40年代首先提出的。它是像素的运动瞬时速度,即空间中的运动物体在观察平面上的像素运动的瞬时速度。光流利用图像序列中像素在时间域上的变化与相邻帧之间的相关性,找到当前帧跟上一帧之间存在的对应关系,从而计算出相邻帧之间的物体运动信息。
在计算机视觉中,Lucas–Kanade算法是一种两帧差分的光流估计算法,它是由Bruce D. Lucas和Takeo Kanade提出的。这个算法是目前最常见、最流行的。它计算两帧在时间在t~t + δt每个像素位置的移动。由于它基于图像信号的泰勒级数,这种方法称为差分,也就是对空间和时间坐标使用偏导数。Lucas-Kanade算法广泛用于图像对齐、光流法、目标追踪、图像拼接和人脸检测等课题中。
2●角点检测
角点检测(corner detection)是计算机视觉系统中用来获得图像特征的一种方法,也称为特征点检测。常用的角点检测算法有Harris和Shi-Tomasi,本例中用的就是Shi-Tomasi角点检测算法。
角点通常被定义为两条边的交点。例如,三角形有三个角,矩形有四个角,这些点就是角点,也叫作矩形、三角形的特征。上面所说的是严格意义上的角点,但是从广义来说,角点指的是拥有特定特征的图像点,这些特征点在图像中有具体的坐标,并具有某些数学特征(比如局部最大或最小的灰度)。
02、实现代码
Python实现代码如下所示(代码中的视频文件face.mp4提供下载):
js import cv2 import numpy as np feature_params = dict(maxCorners=100, qualityLevel=0.3, minDistance=7, blockSize=7) lk_params = dict(winSize=(15,15), maxLevel=2, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)) cap = cv2.VideoCapture('face.mp4') _, frame = cap.read() scaling_factor = 0.5 frame = cv2.resize(frame, None, fx=scaling_factor, fy=scaling_factor, interpolation=cv2.INTER_AREA) gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) p0 = cv2.goodFeaturesToTrack(gray, mask=None, **feature_params) mask = np.zeros_like(frame) while True: _, frame = cap.read() frame = cv2.resize(frame, None, fx=scaling_factor, fy=scaling_factor, interpolation=cv2.INTER_AREA) frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) p1, st, err = cv2.calcOpticalFlowPyrLK(gray, frame_gray, p0, None, **lk_params) good_new = p1[st == 1] good_old = p0[st == 1] for i,(new,old) in enumerate(zip(good_new,good_old)): a,b = new.ravel() c,d = old.ravel() cv2.line(mask, (a, b),(c, d),(0, 150, 0), 1) cv2.circle(frame, (a, b), 3, (0, 255, 0), -1) gray = frame_gray.copy() p0 = good_new.reshape(-1, 1, 2) img = cv2.add(frame, mask) cv2.imshow("Output", img) k = cv2.waitKey(30) if k == 27: break cap.release() cv2.destroyAllWindows()
03、运行结果
运行以上代码的输出结果如图1所示。
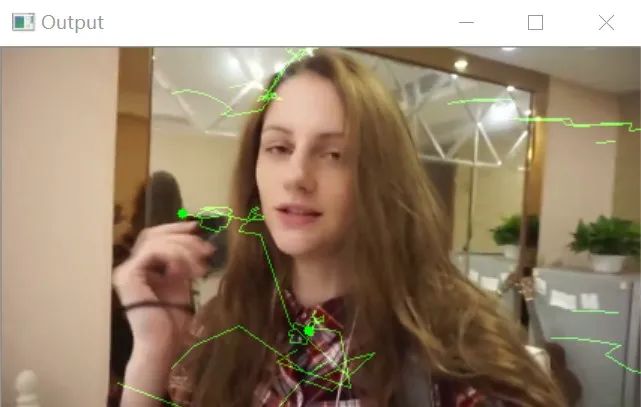
■ 图1 人脸追踪结果
04、代码分析
在本程序中,首先设置了角点(特征点)检测的参数,如最大角点、质量等级、最小距离和区块大小,这些用来计算良好的特征以便进行跟踪。接着设置光流场的参数,如窗口大小、最大等级和终止标准,其中最大等级为使用图像金字塔(图像金字塔是以多个分辨率表示图像的一种有效且简单的概念,它是分辨率逐层降低的、以金字塔形状排列的、图像集合)的层数。其次加载视频,获取到视频的第一帧,调整第一帧的大小并转换为灰度图。goodFeaturesToTrack()函数是寻找好的角点。接着创建一个掩膜mask,以便后面绘制角点的光流轨迹。
在循环中使用方法calcOpticalFlowPyrLK()计算光流,该方法通过金字塔光流方法Lucas-Kanade计算特征集的光流,获取角点的新位置。接着选取好的角点,筛选出旧的角点对应的新角点,并且绘制角点的轨迹。最后,更新当前帧和当前角点的位置,并显示输出到屏幕。copy()函数创建当前帧的一个副本,cv2中的add()方法将两幅图片进行叠加。
在程序的输出中,可以在屏幕上看到显示的角点,并且随着画面的移动,角点也会随之移动。

- 点赞
- 收藏
- 关注作者
评论(0)