自编码器(Auto-Encoder)

@toc
完整代码:https://download.csdn.net/download/qq_43753724/86242828
1、自编码器原理
先考虑有监督学习中神经网络的功能:
是输入的特征向量长度, 是网络输出的向量长度。对于分类问题,网络模型通过把长度为 输入特征向量x变换到长度为 的输出向量o,这个过程可以看成是特征降维的过程,把原始的高维输入向量x变换到低维的变量o。
特征降维在机器学习中有广泛的应用,如文件压缩、数据预处理等。最常见的降维算法有主成分分析法(Principal Components Analysis,PCA),通过对协方差矩阵进行特征分解而得到数据的主要成分,但是PCA本质上是一种线性变换,提取特征的能力极为有限。
能否利用神经网络的强大非线性表达能力学习到低维的数据表示?问题的关键在于,训练神经网络一般需要一个显式的标签数据(或监督信号),但是无监督的数据没有额外的标注信息,只有数据x本身。
于是,尝试利用数据x本身作为监督信号来知道网络的训练,即希望神经网络能够学习到映射 。把网络 切分为两个部分,前面的子网络尝试学习映射关系 ,后面的自网络尝试学习映射关系 。如下图所示。

把 看成一个数据编码(Encode)的过程,把高纬度的输入x编码成低纬度的隐变量z,称为Encoder网络(编码器); 堪称数据解码(Decode)的过程,把编码过后的输入z解码为高纬度的x,称为Decode网络(解码器)。
编码器和解码器共同完成了输入数据x的编码和解码过程,把整个网络模型 称为自动编码器(Auto-Encoder),简称自编码器。如果使用深层神经网络来参数化 和 函数,则称为深度自编码器,如下图所示。
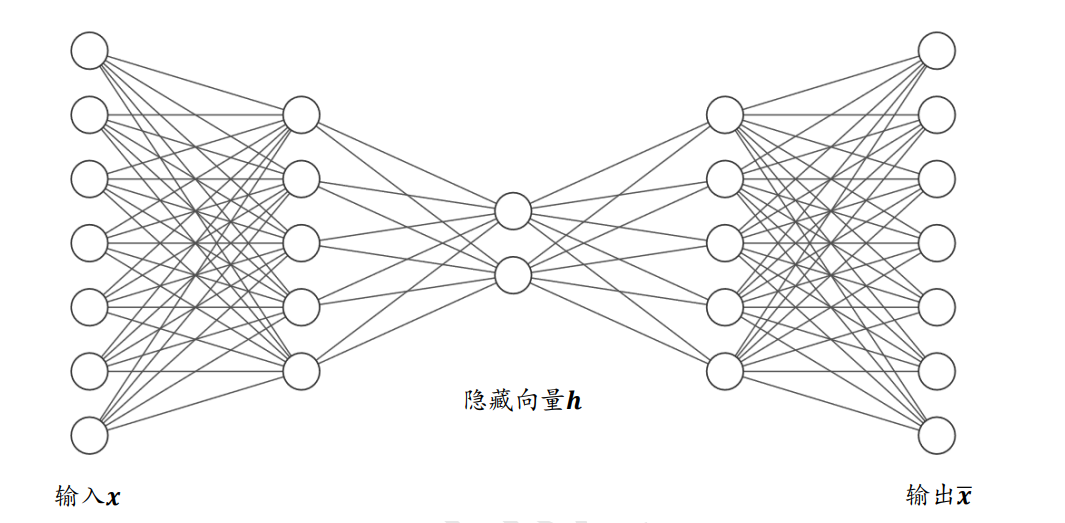
自编码器能够将输入变换到隐藏向量𝒛,并通过解码器重建(Reconstruct,或恢复)出𝒙 。 我们希望解码器的输出能够完美地或者近似恢复出原来的输入,即𝒙 ≈ 𝒙,那么,自编码器 的优化目标可以写成:
其中 表示 𝒙和 的距离度量,称为重建误差函数。最常见的度量方法有欧氏距离 (Euclidean distance)的平方,计算方法如下:
它和均方误差原理上是等价的。自编码器网络和普通的神经网络并没有本质的区别,只不过训练的监督信号由标签𝒚变成了自身𝒙。借助于深层神经网络的非线性特征提取能力,自编码器可以获得良好的数据表示,相对于 PCA 等线性方法,自编码器性能更加优秀,甚至可以更加完美的恢复出输入𝒙。
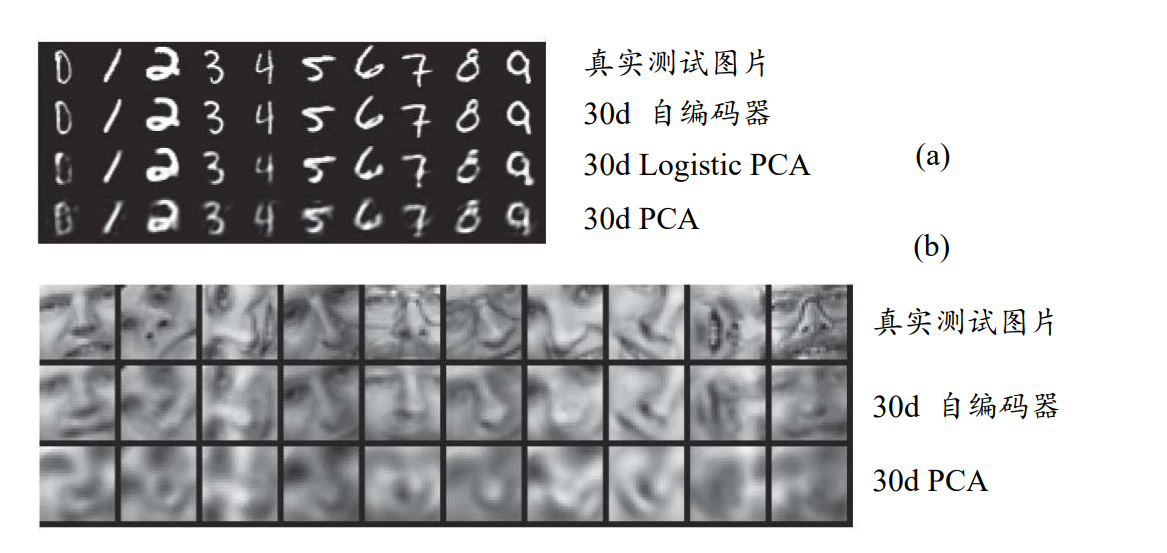
在下图 (a)中,第 1 行是随机采样自测试集的真实 MNIST 手写数字图片,第 2、3、 4 行分别是基于长度为 30 的隐藏向量,使用自编码器、Logistic PCA 和标准 PCA 算法恢复 出的重建样本图片;在图 (b)中,第 1 行为真实的人像图片,第 2、3 行分别是基于长度为 30 的隐藏向量,使用自编码器和标准 PCA 算法恢复出的重建样本。可以看到,使用 深层神经网络的自编码器重建出图片相对清晰,还原度较高,而 PCA 算法重建出的图片较模糊。
2、FashionMNIST图片重建实战
自编码器算法非常简单,实现方便,训练也较为稳定,相对于PCA算法,神经网络的强大表达能力可以学习输入的高层抽象的隐藏特征向量z,同时也能够基于z重建出输入。这里基于FashionMNIST数据集进行图片重建实战。
2.1 FashionMNIST数据集
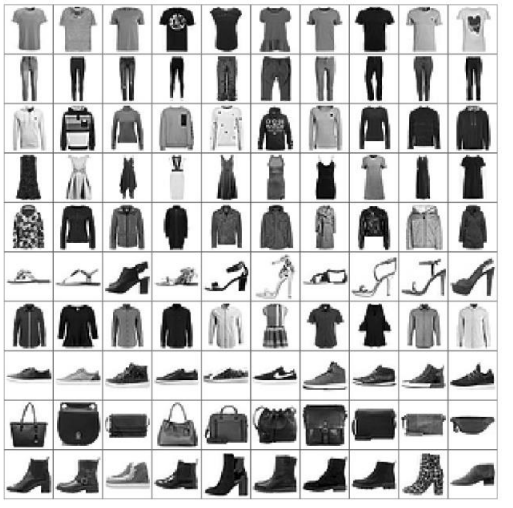
Fashion MNIST是一个定位在比 MNIST图片识别问题稍复杂的数据集,它的设定与MNIST几乎完全一样,包含了10类不同类型的衣服、鞋子、包等灰度图片,图片大小为28× 28,共70000张图片,其中60000张用于训练集,10000张用于测试集,如图所示,每行是一种类别图片。可以看到,Fashion MNIST除了图片内容与MNIST不一样,其它设定都相同,大部分情况可以直接替换掉原来基于MNIST训练的算法代码,而不需要额外修改。由于Fashion MNIST图片识别相对于MNIST图片更难,因此可以用于测试稍复杂的算法性能。
在 TensorFlow 中,加载 Fashion MNIST 数据集同样非常方便,利用 keras.datasets.fashion_mnist.load_data()函数即可在线下载、管理和加载。代码如下:
#加载Fashion MNIST图片数据集
(x_train,y_train),(x_test,y_test)=keras.datasets.fashion_mnist.load_data()
#归一化
x_train,x_test=x_train.astype(np.float32)/255.,x_test.astype(np.float32)/255.
#只需要通过图片数据即可构建数据集对象,不需要标签
train_db = tf.data.Dataset.from_tensor_slices(x_train)
train_db = train_db.shuffle(batchsz * 5).batch(batchsz)
test_db = tf.data.Dataset.from_tensor_slices(x_test)
test_db = test_db.batch(batchsz)
print(x_train.shape, y_train.shape)
print(x_test.shape, y_test.shape)
2.2 编码器
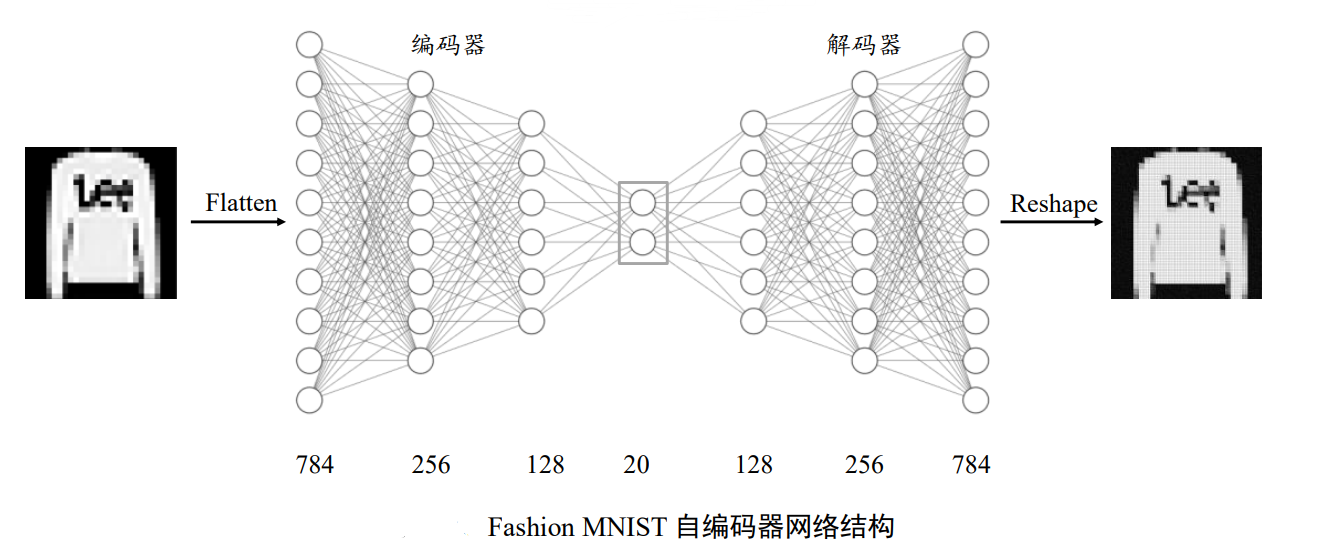
我们利用编码器将输入图片 降维到较低维度的隐藏向量: ,并基于隐藏向量h利用解码器重建图片,自编码器模型如图所示,编码器由3层全连接层网络组成,输出节点数分别为256、128、20,解码器同样由3层全连接网络组成,输出节点数分别为128、256、784。
首先是编码器子网络的实现。利用 3 层的神经网络将长度为 784 的图片向量数据依次 降维到 256、128,最后降维到 h_dim 维度,每层使用 ReLU 激活函数,最后一层不使用激 活函数。代码如下:
#创建Encoders网络,实现在自编码器类的初始化函数中
self.encoder=Sequential([
layers.Dense(256,activation=tf.nn.relu),
layers.Dense(128,activation=tf.nn.relu),
layers.Dense(h_dim)
])
2.3 解码器
然后再来创建解码器子网络,这里基于隐藏向量 h_dim 依次升维到 128、256、784 长度,除最后一层,激活函数使用 ReLU 函数。解码器的输出为 784 长度的向量,代表了打 平后的28 × 28大小图片,通过 Reshape 操作即可恢复为图片矩阵。代码如下:
#创建Decoders网络
self.decoder=Sequential([
layers.Dense(128,activation=tf.nn.relu),
layers.Dense(256,activation=tf.nn.relu),
layers.Dense(784)
])
2.4 自编码器
上述的编码器和解码器 2 个子网络均实现在自编码器类 AE 中,我们在初始化函数中同时创建这两个子网络。
接下来将前向传播过程实现在 call 函数中,输入图片首先通过 encoder 子网络得到隐 藏向量 h,再通过 decoder 得到重建图片。依次调用编码器和解码器的前向传播函数即可, 代码如下:
#自编码器类
class AE(keras.Model):
#自编码器模型类,包含了Encoder和Decoder2个子网络
def __init__(self):
super(AE,self).__init__()
#创建Encoders网络
self.encoder=Sequential([
layers.Dense(256,activation=tf.nn.relu),
layers.Dense(128,activation=tf.nn.relu),
layers.Dense(h_dim)
])
#创建Decoders网络
self.decoder=Sequential([
layers.Dense(128,activation=tf.nn.relu),
layers.Dense(256,activation=tf.nn.relu),
layers.Dense(784)
])
def call(self,inputs,training=None):
#前向传播函数
#编码获得隐藏向量h,[b,784]=>[b,20]
h=self.encoder(inputs)
#解码获得重建图片,[b,20]=>[b,784]
x_hat=self.decoder(h)
return x_hat
2.5 网络训练
自编码器的训练过程与分类器的基本一致,通过误差函数计算出重建向量
与原始输 入向量𝒙之间的距离,再利用 TensorFlow 的自动求导机制同时求出 encoder 和 decoder 的梯度,循环更新即可。
首先创建自编码器实例和优化器,并设置合适的学习率。
#创建自编码器实例和优化器,并设置合适的学习率
#创建网路对象
model=AE()
#指定输入大小
model.build(input_shape=(4,784))
#打印网络信息
model.summary()
#创建优化器,并设置学习率
optimizer=keras.optimizers.Adam(lr=lr)
这里固定训练 100 个 Epoch,每次通过前向计算获得重建图片向量,并利用 tf.nn.sigmoid_cross_entropy_with_logits 损失函数计算重建图片与原始图片直接的误差,实际上利用 MSE 误差函数也是可行的。代码如下:
for epoch in range(100):#训练100个Epoch
for step,x in enumerate(train_db):#遍历训练集
#打平,[b,28,28]=>[b,784]
x=tf.reshape(x,[-1,784])
#构建梯度记录器
with tf.GradientTape() as tape:
#前向计算获得重建的图片
x_rec_logits=model(x)
#计算重建图片与输入之间的损失函数
rec_loss=tf.nn.sigmoid_cross_entropy_with_logits(labels=x,logits=x_rec_logits)
#计算均值
rec_loss=tf.reduce_mean(rec_loss)
#自动求导,包含了2个子网络的梯度
grads=tape.gradient(rec_loss,model.trainable_variables)
#自动更新,同时更新2个子网络
optimizer.apply_gradients(zip(grads,model.trainable_variables))
if step%100==0:
#间隔性打印训练误差
print(epoch,step,float(rec_loss))
2.6 图片重建
与分类问题不同的是,自编码器的模型性能一般不好量化评价,尽管ℒ值可以在一定程度上代表网络的学习效果,但我们最终希望获得还原度较高、样式较丰富的重建样本。 因此一般需要根据具体问题来讨论自编码器的学习效果,比如对于图片重建,一般依赖于人工主观评价图片生成的质量,或利用某些图片逼真度计算方法(如 Inception Score 和 Frechet Inception Distance)来辅助评估。
为了测试图片重建效果,我们把数据集切分为训练集与测试集,其中测试集不参与训 练。我们从测试集中随机采样测试图片 ,经过自编码器计算得到重建后的图片, 然后将真实图片与重建图片保存为图片阵列,并可视化,方便比对。代码如下:
#测试
#重建图片,从测试集采样一批图片
x=next(iter(test_db))
#打平送入自编码器
logits=model(tf.reshape(x,[-1,784]))
#将输出转换为像素值,使用sigmoid函数
x_hat=tf.sigmoid(logits)
#恢复为28*28,[b,784]=>[b,28,28]
x_hat=tf.reshape(x_hat,[-1,28,28])
#输入的前50张+重建的前50张图片合并(在第1个维度拼接),[b,28,28]=>[2b,28,28]
x_concat=tf.concat([x[:50],x_hat[:50]],axis=0)
#恢复为0-255
x_concat=x_concat.numpy()*255.
#转化为整型
x_concat=x_concat.astype(np.uint8)
#保存图片
save_images(x_concat,'ae_images/rec_epoch_%d.png'%epoch)
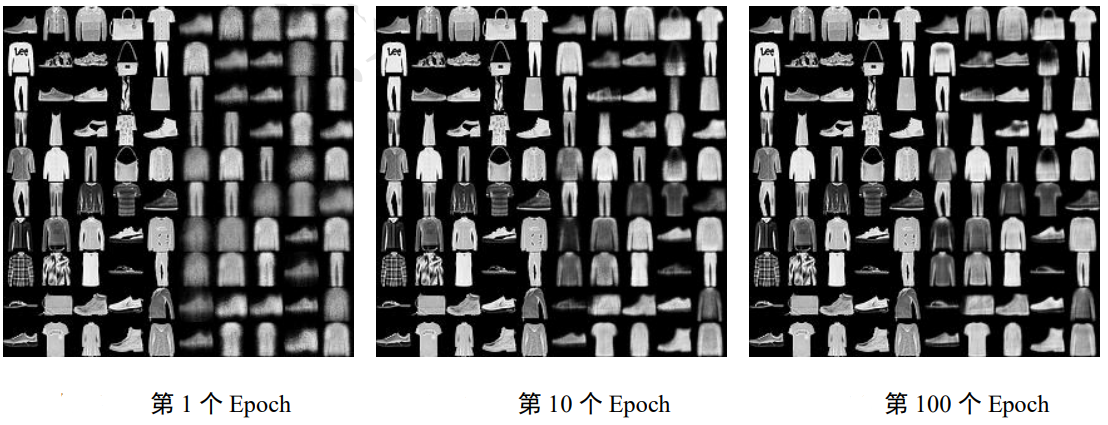
图片重建的效果如图 所示,其中每张图片的左边5列为真实图片,右边5列为对应的重建图片。可以看到,第一个 Epoch时,图片重建效果较差,图片非常模糊,逼真度较差;随着训练的进行,重建图片边缘越来越清晰,第100个Epoch时,重建的图片效果已经比较接近真实图片。
这里的 save_images 函数负责将多张图片合并并保存为一张大图,这部分代码使用 PIL 图片库完成图片阵列逻辑,代码如下:
#save_images函数负责将多张图片合并并保存为一张大图,使用PIL图片库完成图片阵列逻辑
def save_images(imgs,name):
#创建280*280大小图片阵列
new_im=Image.new('L',(280,280))
index=0
for i in range(0,280,28):#10行图片阵列
for j in range(0,280,28):#10列图片阵列
im=imgs[index]
im=Image.fromarray(im,mode='L')
new_im.paste(im,(i,j))#写入对应位置
index+=1
#保存图片阵列
new_im.save(name)
迭代100次:
重建的100张图片:

- 点赞
- 收藏
- 关注作者
评论(0)