ResNet-RS架构复现--CVPR2021

@toc
参考论文:Revisiting ResNets: Improved Training and Scaling Strategies
作者:Irwan Bello, William Fedus, Xianzhi Du, Ekin D. Cubuk, Aravind Srinivas, Tsung-Yi Lin, Jonathon Shlens, Barret Zoph
这里主要是架构复现,由于论文中细节太多,原理部分只是不细讲。
1、摘要
我们的工作重新审视了规范的 ResNet (He et al., 2015),并研究了这三个方面,以试图解开它们。也许令人惊讶的是,我们发现训练和扩展策略可能比架构变化更重要,而且由此产生的 ResNet 与最近最先进的模型相匹配。我们展示了表现最佳的缩放策略取决于训练方案,并提供了两种新的缩放策略:(1)在可能发生过度拟合的情况下缩放模型深度(否则宽度缩放更可取); (2) 提高图像分辨率的速度比之前推荐的要慢(Tan & Le,2019)。使用改进的训练和扩展策略,我们设计了一系列 ResNet 架构 ResNet-RS,它比 TPU 上的 EfficientNets 快 1.7 倍 - 2.7 倍,同时在 ImageNet 上实现了类似的精度。在大规模的半监督学习设置中,ResNet-RS 实现了 86.2% 的 top-1 ImageNet 准确率,同时比 EfficientNetNoisyStudent 快 4.7 倍。
2、ResNet-D架构
这篇论文是在ResNet-D架构基础上改造的。
在Bag of Tricks for Image Classification with Convolutional Neural Networks 这篇论文中的ResNet-D基础结构如下所示:

注意,残差边上多了个池化操作。
ResNet-D (He et al., 2018) 结合了对原始 ResNet 架构的以下四个调整。
- 首先,在 InceptionV3 (Szegedy et al., 2016) 中首次提出,将干中的 7×7 卷积替换为三个较小的 3×3 卷积。
- 其次,在下采样块的残差路径中切换前两个卷积的步幅大小。
- 第三,将下采样块的skip connection路径中的 stride-2 1×1 卷积替换为 stride-2 2×2 平均池化,然后是non-strided 1×1 卷积。
- 第四,去除 stride2 3×3 max pool layer,下采样发生在下一个bottleneck block的第一个 3×3 卷积中。

3、改进训练方法
我们在表 1 中展示了关于训练、正则化方法和架构变化的附加研究。基准 ResNet-200 获得了 79.0% 的 top-1 准确率。我们仅通过改进的训练方法将其性能提高到 82.2% (+3.2%),而无需任何架构更改。当添加两个常见且简单的架构更改(Squeeze-and-Excitation 和 ResNet-D)时,我们将性能进一步提高到 83.4%。仅训练方法就导致了总改进的 3/4,这证明了它们对 ImageNet 性能的关键影响。

表 1. ResNet-RS 训练配方的附加研究。颜色指的是训练方法、正则化方法和架构改进。使用逐步学习率衰减计划对基线 ResNet-200 进行了标准 90 个 epoch 的训练。图像分辨率为 256×256。所有数字都在 ImageNet 验证集上报告,并在 2 次运行中取平均值。 † 仅在使用正则化方法后,将训练持续时间增加到 350 个 epoch 才会有用,否则会由于过度拟合而导致精度下降。
4、改进的缩放策略
- 在可能发生过拟合的情况下进行深度缩放:对于较长的epoch,深度缩放优于宽度缩放;对于较短的epoch,宽度缩放优于深度缩放。
- 缓慢的图像分辨率缩放。

图 3. ResNet 在深度、宽度、图像分辨率和训练时期的缩放。在训练模型 10、100 或 350 个 epoch 时,我们比较了四种不同图像分辨率 [128,160,224,320] 的深度缩放和宽度缩放。我们发现表现最好的缩放策略取决于训练机制,这揭示了从小规模机制推断缩放规则的缺陷。
(左)10 Epoch Regime:宽度缩放是速度精度帕累托曲线的最佳策略。
(中)100 Epoch Regime:深度缩放有时优于宽度缩放。
(右)350 Epoch Regime:深度缩放始终比宽度缩放有很大的优势。即使使用正则化方法,过度拟合仍然是一个问题。模型详细信息:所有模型都从深度 101 开始,并增加到 [101,200,300,400]。所有模型宽度都以 1.0x 的乘数开始,并通过 [1.0,1.5,2.0] 增加。对于所有模型,我们调整正则化以限制过度拟合(参见附录 E)。在 ImageNet minival-set 上报告准确度,在 TPU 上测量训练时间。
5、Appendix
5.1 Pareto 曲线中所有 ResNet-RS 模型的详细信息
本节详细介绍 ResNet-RS Pareto 曲线中的所有模型。在表 7 中,我们观察到我们的 ResNet-RS 模型在 TPU 上的 EfficientNet Pareto 曲线上获得了 1.7x - 2.7x 的加速。

表 7. Pareto 曲线中 ResNet-RS 模型的详细信息。使用第 5 节中提到的改进对所有模型进行了 350 个 epoch 的训练。所有 ResNet-RS 模型的确切超参数在表 8 中。Tesla V100 GPU 上的延迟以全精度 (float32) 测量。 TPUv3 上的延迟是使用 bfloat16 精度测量的。所有延迟都是用 128 个图像的初始训练批量大小测量的,该大小除以 2 直到它适合加速器。
5.2 ResNet-RS 架构细节
我们提供了有关 ResNet-RS 架构更改的更多详细信息。我们重申 ResNet-RS 是:改进的缩放策略、改进的训练方法、ResNet-D 修改(He 等人,2018 年)和 SqueezeExcitation 模块(Hu 等人,2018 年)的组合。
表 11 显示了我们工作中使用的所有 ResNet 深度的块布局。 ResNet-50 到 ResNet-200 使用 He 等人的标准块配置。 (2015 年)。 ResNet-270 及更高版本主要扩展 c3 和 c4 中的块数,我们尝试保持它们的比例大致恒定。我们凭经验发现,在较低阶段添加块会限制过度拟合,因为较低层中的块具有显着较少的参数,即使所有块具有相同数量的 FLOP。图 6 显示了我们的 ResNet-RS 模型中使用的 ResNet-D 架构更改。

图 6. ResNet-RS 架构图。
输出大小假定输入图像分辨率为 224×224。
在卷积布局中,x2 是指第一个 3×3 卷积,步长为 2。
ResNet-RS 架构是 Squeeze-and-Excitation 和 ResNet-D 的简单组合。
× 符号表示块在 ResNet-101 架构中重复的次数。这些值根据表 11 中的块布局随深度变化。
5.3 Scaling Analysis Regularization and Model Details

表 12. Dropout values for filter scaling.。 filter scaling是指基于原始 ResNet 架构中filters数量的filters缩放乘数。
6、ResNet-RS架构搭建
import tensorflow as tf
from tensorflow.keras import layers
from tensorflow.keras.models import Model
from typing import Callable, Dict, List, Union
6.1 模型配置项
DEPTH_TO_WEIGHT_VARIANTS = {
50: [160],
101: [160, 192],
152: [192, 224, 256],
200: [256],
270: [256],
350: [256, 320],
420: [320],
}
BLOCK_ARGS = {
50: [
{
"input_filters": 64,
"num_repeats": 3
},
{
"input_filters": 128,
"num_repeats": 4
},
{
"input_filters": 256,
"num_repeats": 6
},
{
"input_filters": 512,
"num_repeats": 3
},
],
101: [
{
"input_filters": 64,
"num_repeats": 3
},
{
"input_filters": 128,
"num_repeats": 4
},
{
"input_filters": 256,
"num_repeats": 23
},
{
"input_filters": 512,
"num_repeats": 3
},
],
152: [
{
"input_filters": 64,
"num_repeats": 3
},
{
"input_filters": 128,
"num_repeats": 8
},
{
"input_filters": 256,
"num_repeats": 36
},
{
"input_filters": 512,
"num_repeats": 3
},
],
200: [
{
"input_filters": 64,
"num_repeats": 3
},
{
"input_filters": 128,
"num_repeats": 24
},
{
"input_filters": 256,
"num_repeats": 36
},
{
"input_filters": 512,
"num_repeats": 3
},
],
270: [
{
"input_filters": 64,
"num_repeats": 4
},
{
"input_filters": 128,
"num_repeats": 29
},
{
"input_filters": 256,
"num_repeats": 53
},
{
"input_filters": 512,
"num_repeats": 4
},
],
350: [
{
"input_filters": 64,
"num_repeats": 4
},
{
"input_filters": 128,
"num_repeats": 36
},
{
"input_filters": 256,
"num_repeats": 72
},
{
"input_filters": 512,
"num_repeats": 4
},
],
420: [
{
"input_filters": 64,
"num_repeats": 4
},
{
"input_filters": 128,
"num_repeats": 44
},
{
"input_filters": 256,
"num_repeats": 87
},
{
"input_filters": 512,
"num_repeats": 4
},
],
}
CONV_KERNEL_INITIALIZER = {
"class_name": "VarianceScaling",
"config": {
"scale": 2.0,
"mode": "fan_out",
"distribution": "truncated_normal"
},
}
这里只搭建ResNet-RS101架构
6.2 get_survival_probability
根据区块数和初始速率获取生存概率
def get_survival_probability(init_rate, block_num, total_blocks):
return init_rate * float(block_num) / total_blocks
6.3 fixed_padding
def fixed_padding(inputs, kernel_size):
"""沿空间维度填充输入,与输入大小无关"""
pad_total = kernel_size - 1
pad_beg = pad_total // 2
pad_end = pad_total - pad_beg
# 使用 ZeroPadding 来避免 TFOpLambda 层
padded_inputs = layers.ZeroPadding2D(
padding=((pad_beg, pad_end), (pad_beg, pad_end)))(inputs)
return padded_inputs
6.4 Conv2DFixedPadding
# Conv2D block with fixed padding
def Conv2DFixedPadding(filters, kernel_size, strides, name=None):
def apply(inputs):
if strides > 1:
inputs = fixed_padding(inputs, kernel_size)
return layers.Conv2D(filters=filters,
kernel_size=kernel_size,
strides=strides,
padding='same' if strides == 1 else 'valid',
use_bias=False,
kernel_initializer=CONV_KERNEL_INITIALIZER,
name=name)(inputs)
return apply
6.5 STEM块
# ResNet-D型STEM块
def STEM(inputs,
bn_momentum: float = 0.0,
bn_epsilon: float = 1e-5,
activation: str = 'relu',
name=None):
# first stem block
x = Conv2DFixedPadding(filters=32,
kernel_size=3,
strides=2,
name=name + '_stem_conv_1')(inputs)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_stem_batch_norm_1')(x)
x = layers.Activation(activation, name=name + '_stem_act_1')(x)
# second stem block
x = Conv2DFixedPadding(filters=32,
kernel_size=3,
strides=1,
name=name + '_stem_conv_2')(x)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_stem_batch_norm_2')(x)
x = layers.Activation(activation, name=name + '_stem_act_2')(x)
# final stem block
x = Conv2DFixedPadding(filters=64,
kernel_size=3,
strides=1,
name=name + '_stem_conv_3')(x)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_stem_batch_norm_3')(x)
x = layers.Activation(activation, name=name + '_stem_act_3')(x)
# Replace stem max pool:
x = Conv2DFixedPadding(filters=64,
kernel_size=3,
strides=2,
name=name + '_stem_conv_4')(x)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + 'stem_batch_norm_4')(x)
x = layers.Activation(activation, name=name + '_stem_act_4')(x)
return x
6.6 SE注意力机制模块
def SE(inputs,
in_filters: int,
se_ratio: float = 0.25,
expand_ratio: int = 1,
name=None):
x = layers.GlobalAveragePooling2D(name=name + '_se_squeeze')(inputs)
se_shape = (1, 1, x.shape[-1])
x = layers.Reshape(se_shape, name=name + '_se_reshape')(x)
num_reduced_filters = max(1, int(in_filters * 4 * se_ratio))
x = layers.Conv2D(filters=num_reduced_filters,
kernel_size=(1, 1),
strides=[1, 1],
kernel_initializer=CONV_KERNEL_INITIALIZER,
padding='same',
use_bias=False,
activation='relu',
name=name + '_se_reduce')(x)
x = layers.Conv2D(filters=4 * in_filters * expand_ratio, # Expand ratio is 1 by default
kernel_size=[1, 1],
strides=[1, 1],
kernel_initializer=CONV_KERNEL_INITIALIZER,
padding='same',
use_bias=False,
activation='sigmoid',
name=name + '_se_expand')(x)
out = layers.multiply([inputs, x], name=name + '_se_excite')
return out
6.7 Bottleneck Block
def BottleneckBlock(filters: int,
strides: int,
use_projection: bool,
bn_momentum: float = 0.0,
bn_epsilon: float = 1e-5,
activation: str = 'relu',
se_ratio: float = 0.25,
survival_probability: float = 0.8,
name=None):
# 带有BN的残差网络的bottle block变体
def apply(inputs):
shortcut = inputs
# 是否需要projection shortcut
if use_projection:
filters_out = filters * 4
if strides == 2:
shortcut = layers.AveragePooling2D(pool_size=(2, 2),
strides=(2, 2),
padding='same',
name=name + '_projection_pooling')(inputs)
shortcut = Conv2DFixedPadding(filters=filters_out,
kernel_size=1,
strides=1,
name=name + '_projection_conv')(shortcut)
else:
shortcut = Conv2DFixedPadding(filters=filters_out,
kernel_size=1,
strides=strides,
name=name + '_projection_conv')(inputs)
shortcut = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_projection_batch_norm')(shortcut)
# first conv layer:1x1 conv
x = Conv2DFixedPadding(filters=filters,
kernel_size=1,
strides=1,
name=name + '_conv_1')(inputs)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + 'batch_norm_1')(x)
x = layers.Activation(activation, name=name + '_act_1')(x)
# second conv layer:3x3 conv
x = Conv2DFixedPadding(filters=filters,
kernel_size=3,
strides=strides,
name=name + '_conv_2')(x)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_batch_norm_2')(x)
x = layers.Activation(activation, name=name + '_act_2')(x)
# third conv layer:1x1 conv
x = Conv2DFixedPadding(filters=filters * 4,
kernel_size=1,
strides=1,
name=name + '_conv_3')(x)
x = layers.BatchNormalization(momentum=bn_momentum,
epsilon=bn_epsilon,
name=name + '_batch_norm_3')(x)
if 0 < se_ratio < 1:
x = SE(x, filters, se_ratio=se_ratio, name=name + '_se')
# Drop connect
if survival_probability:
x = layers.Dropout(survival_probability,
noise_shape=(None, 1, 1, 1),
name=name + '_drop')(x)
x = layers.Add()([x, shortcut])
return layers.Activation(activation, name=name + '_output_act')(x)
return apply
6.8 Block Group
def BlockGroup(filters,
strides,
num_repeats, # Block重复次数
se_ratio: float = 0.25,
bn_epsilon: float = 1e-5,
bn_momentum: float = 0.0,
activation: str = "relu",
survival_probability: float = 0.8,
name=None):
"""Create one group of blocks for the ResNet model."""
def apply(inputs):
# 只有每个block_group的第一个block块使用projection shortcut和strides
x = BottleneckBlock(
filters=filters,
strides=strides,
use_projection=True,
se_ratio=se_ratio,
bn_epsilon=bn_epsilon,
bn_momentum=bn_momentum,
activation=activation,
survival_probability=survival_probability,
name=name + "_block_0_",
)(inputs)
for i in range(1, num_repeats):
x = BottleneckBlock(
filters=filters,
strides=1,
use_projection=False,
se_ratio=se_ratio,
activation=activation,
bn_epsilon=bn_epsilon,
bn_momentum=bn_momentum,
survival_probability=survival_probability,
name=name + f"_block_{i}_",
)(x)
return x
return apply
6.9 ResNetRS
# 构建ResNet-RS模型:这里复现ResNet-RS101
def ResNetRS(depth: int, # ResNet网络的深度,101:[160,192]
input_shape=None,
bn_momentum=0.0, # BN层的动量参数
bn_epsilon=1e-5, # BN层的Epsilon参数
activation: str = 'relu', # 激活函数
se_ratio=0.25, # 挤压和激发曾的比例
dropout_rate=0.25, # 最终分类曾之前的dropout
drop_connect_rate=0.2, # skip connection的丢失率
include_top=True, # 是否在网络顶部包含全连接层
block_args: List[Dict[str, int]] = None, # 字典列表,构造块模块的参数
model_name='resnet-rs', # 模型的名称
pooling=None, # 可选的池化模式
weights='imagenet',
input_tensor=None,
classes=1000, # 分类数
classifier_activation: Union[str, Callable] = 'softmax', # 分类器激活
include_preprocessing=True): # 是否包含预处理层(对输入图像通过ImageNet均值和标准差进行归一化):
img_input = layers.Input(shape=input_shape)
x = img_input
inputs = img_input
# 这里本来有个预处理判断,tensorflow版本太低。
# if include_preprocessing:
# num_channels=input_shape[-1]
# if num_channels==3:
# # 预处理
# Build stem
x = STEM(x, bn_momentum=bn_momentum, bn_epsilon=bn_epsilon, activation=activation, name='stem')
# Build blocks
if block_args is None:
block_args = BLOCK_ARGS[depth]
for i, args in enumerate(block_args):
# print(i,args)
survival_probability = get_survival_probability(init_rate=drop_connect_rate,
block_num=i + 2,
total_blocks=len(block_args) + 1)
# args['input_filters']=[64,128,256,512]
# 只有第一个BlockGroup的stride=1,后面三个都是stride=2
x = BlockGroup(filters=args['input_filters'],
activation=activation,
strides=(1 if i == 0 else 2),
num_repeats=args['num_repeats'],
se_ratio=se_ratio,
bn_momentum=bn_momentum,
bn_epsilon=bn_epsilon,
survival_probability=survival_probability,
name=f"BlockGroup{i + 2}_")(x)
# Build head:
if include_top:
x = layers.GlobalAveragePooling2D(name='avg_pool')(x)
if dropout_rate > 0:
x = layers.Dropout(dropout_rate, name='top_dropout')(x)
x = layers.Dense(classes, activation=classifier_activation, name='predictions')(x)
else:
if pooling == 'avg':
x = layers.GlobalAveragePooling2D(name='avg_pool')(x)
elif pooling == 'max':
x = layers.GlobalMaxPooling2D(name='max_pool')(x)
# Create model
model = Model(inputs, x, name=model_name)
return model
6.10 ResNetRS101架构
# build ResNet-RS101 model
def ResNetRS101(include_top=True,
weights='imagenet',
classes=1000,
input_shape=None,
input_tensor=None,
pooling=None,
classifier_activation='softmax',
include_preprocessing=True):
return ResNetRS(depth=101,
include_top=include_top,
drop_connect_rate=0.0,
dropout_rate=0.25,
weights=weights,
classes=classes,
input_shape=input_shape,
input_tensor=input_tensor,
pooling=pooling,
classifier_activation=classifier_activation,
model_name='resnet-rs-101',
include_preprocessing=include_preprocessing)
if __name__ == '__main__':
model = ResNetRS101(input_shape=(224, 224, 3), classes=1000)
model.summary()
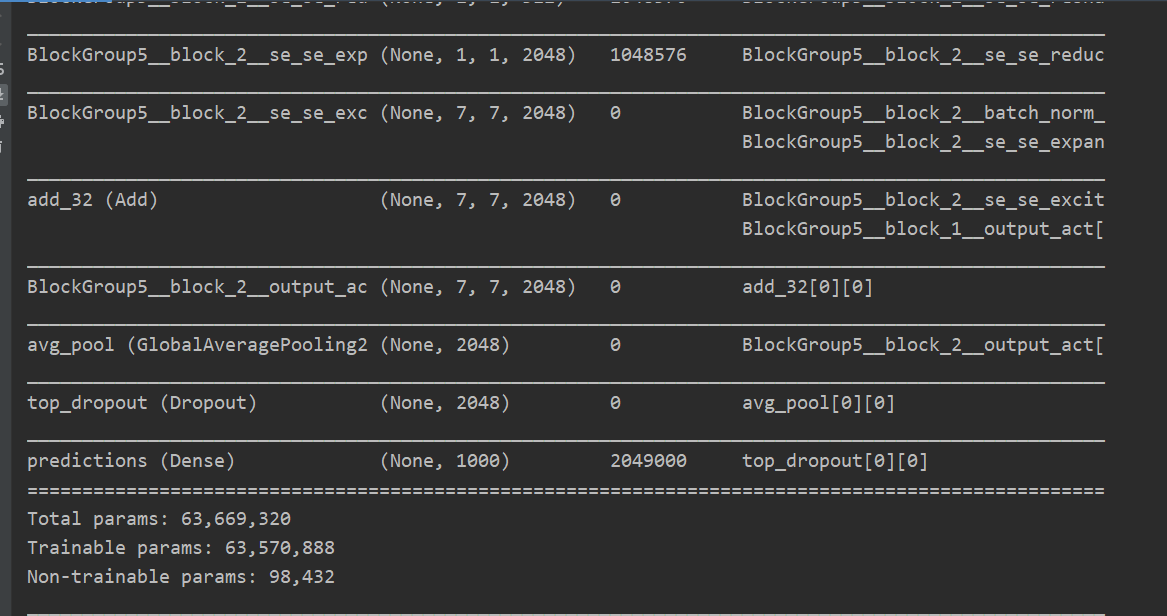
6.11 模型结构大图

References
Revisiting ResNets: Improved Training and Scaling Strategies
Bag of Tricks for Image Classification with Convolutional Neural Networks
https://www.tensorflow.org/api_docs/python/tf/keras/applications/resnet_rs

- 点赞
- 收藏
- 关注作者
评论(0)