树莓派内核驱动编写——控制GPIO的输出

【摘要】 一、地址总线地址,物理地址,虚拟地址 参考博文:地址概念树莓派1.BCM2835 树莓派3b CPU型号,是ARM-cotexA53架构2440 2410 CPU型号 是ARM9架构2.树莓派是32位系统,1G 内存,只能识别949M3.总线地址4G,物理地址1G,虚拟地址4G 二、芯片手册1.芯片目录Introduction 基本介绍Auxilia...
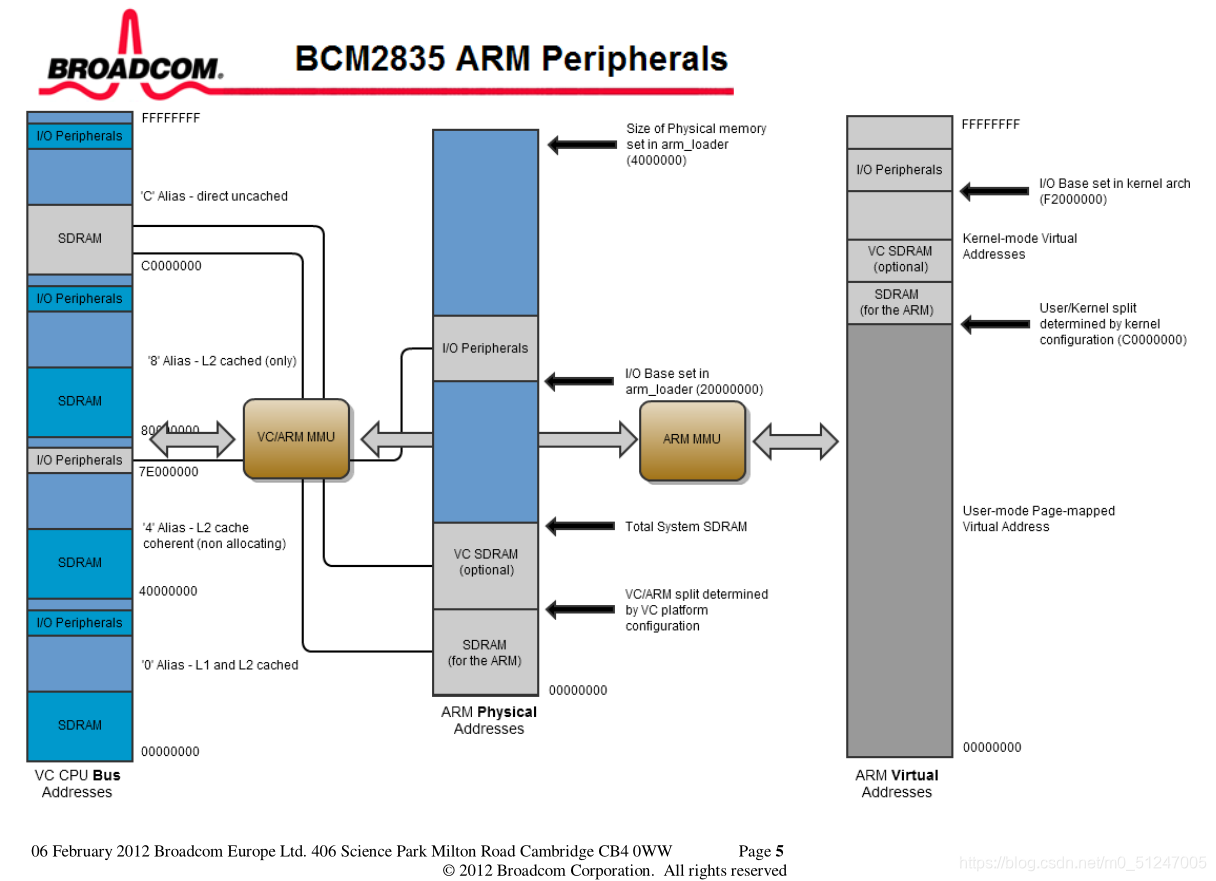
一、地址
总线地址,物理地址,虚拟地址 参考博文:地址概念
树莓派
1.BCM2835 树莓派3b CPU型号,是ARM-cotexA53架构
2440 2410 CPU型号 是ARM9架构
2.树莓派是32位系统,1G 内存,只能识别949M
3.总线地址4G,物理地址1G,虚拟地址4G
二、芯片手册
1.芯片目录
- Introduction 基本介绍
- Auxiliaries: UART1 & SPI1, SPI2 串口开发章节
- BSC
- DMA Controller 快速内存拷贝
- External Mass Media Controller
- General Purpose I/O (GPIO)
- Interrupts
- PCM / I2S Audio
- Pulse Width Modulator
- SPI
- SPI/BSC SLAVE
- System Timer
- UART
- Timer (ARM side)
- USB
2.GPIO章节
- 树莓派官网:树莓派(看引脚)
- 54个通用I/O,至少2个功能选择(输入输出)
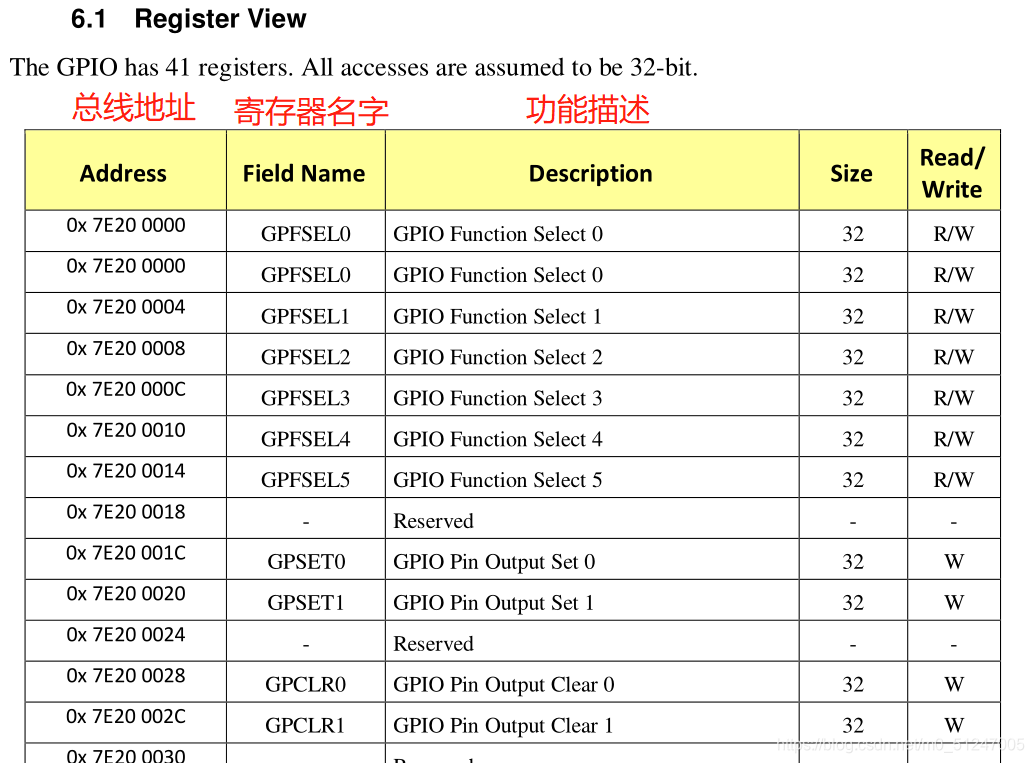
- GPIO有41个寄存器
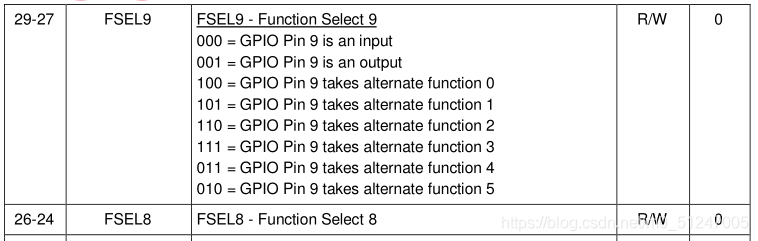
- 功能选择
GPFSEL0 GPIO Function Select 0 功能选择(输入输出)
GPFSEL0 控制0-9
GPFSEL1 控制11-19

- 输出控制
GPSET0 GPIO Pin Output Set 0 输出1
0 = No effect
1 = Set GPIO pin n
GPCLR0 GPIO Pin Output Clear 0 清0
0 = No effect
1 = Clear GPIO pin n
描述
1.特别注意树莓派是总线地址,其他芯片是物理地址.
2.除了功能和输入输出控制外,后面还有上升沿边缘触发的寄存器
三、编写内核代码
- 添加寄存器地址,编写到函数pin4_init里
volatile:指令不会因编译器的优化而省略,直接读取
GPIO偏移量
//定义无符号指针,volatile防止优化
volatile unsigned int* GPFSEL0 = NULL;
volatile unsigned int* GPSET0 = NULL;
volatile unsigned int* GPCLR0 = NULL;
//指针指向虚拟地址,0x3f200000是物理地址,ioremap把物理地址映射成虚拟地址
//物理地址:3f000000加偏移量200000
//ioremap使用参考内核
GPFSEL0 = (volatile unsigned int *)ioremap(0x3f200000,4);
GPSET0 = (volatile unsigned int *)ioremap(0x3f20001C,4);
GPCLR0 = (volatile unsigned int *)ioremap(0x3f200028,4);
- 编写open函数
配置功能寄存器
按位操作:先清零12-14位,在赋值
*GPFSEL0 &= ~(6<<12);//配置pin4引脚为输出引脚
*GPFSEL0 |= 1<<12;
- 编写write函数
读取上层write值:在内核中查找函数:copy_from_user,参考内核使用函数 userCmd和上层传的类型一样
根据值操作io口:操作第4位
//获取上层write值
copy_from_user(&userCmd,buf,count);
//根据值操作io口
if(userCmd == 1){
*GPSET0 |= 1<<4;
printk("set 1\n");
}else if(userCmd == 0){
*GPCLR0 |= 1<<4;
printk("set 0\n");
}else{
printk("undo\n");
}
- 解除映射
iounmap(GPFSEL0);//先解除虚拟地址映射,在销毁设备
iounmap(GPSET0);
iounmap(GPCLR0);
完整代码
#include <linux/fs.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/types.h>
#include <asm/io.h>
volatile unsigned int* GPFSEL0 = NULL;
volatile unsigned int* GPSET0 = NULL;
volatile unsigned int* GPCLR0 = NULL;
static struct class *pin4_class;
static struct device *pin4_class_dev;
static dev_t devno;
static int major = 231;
static int minor = 0;
static char *module_name = "pin4";
static ssize_t pin4_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
{
int userCmd;
//获取上层write值
copy_from_user(&userCmd,buf,count);
printk("get value\n");
//根据值操作io口
if(userCmd == 1){
*GPSET0 |= 1<<4;
printk("set 1\n");
}else if(userCmd == 0){
*GPCLR0 |= 1<<4;
printk("set 0\n");
}else{
printk("undo\n");
}
return 0;
}
static ssize_t pin4_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
printk("pin4_read\n");
return 0;
}
static int pin4_open(struct inode * inode, struct file * filp)
{
*GPFSEL0 &= ~(6<<12);//配置pin4引脚为输出引脚
*GPFSEL0 |= 1<<12;
printk("pin4_open\n");//内核的打印函数
return 0;
}
//在内核源码查找struct file_operations看结构体成员,添加用到的函数
static const struct file_operations pin4_fops = {
.owner = THIS_MODULE,
.write = pin4_write,//函数指针
.open = pin4_open,
.read = pin4_read,
};
static int __init pin4_init(void)//驱动入口
{
int ret;
printk("insmod driver pin4 success\n");
devno = MKDEV(major,minor);//创建设备号
ret = register_chrdev(major,module_name,&pin4_fops);//注册驱动,把这个驱动加入到内核链表
pin4_class = class_create(THIS_MODULE,"myfirstdemo");//代码自动生成设备
pin4_class_dev = device_create(pin4_class,NULL,devno,NULL,module_name);//创建设备文件
GPFSEL0 = (volatile unsigned int *)ioremap(0x3f200000,4);//物理地址转换为虚拟地址,io口寄存器映射成普通内存单元进行访问
GPSET0 = (volatile unsigned int *)ioremap(0x3f20001C,4);
GPCLR0 = (volatile unsigned int *)ioremap(0x3f200028,4);
return 0;
}
static void __exit pin4_exit(void)
{
iounmap(GPFSEL0);//先解除虚拟地址映射,在销毁设备
iounmap(GPSET0);
iounmap(GPCLR0);
device_destroy(pin4_class,devno);//销毁设备
class_destroy(pin4_class);//销毁类
unregister_chrdev(major,module_name);//卸载设备
}
module_init(pin4_init);//入口,是个宏
module_exit(pin4_exit);
MODULE_LICENSE("GPL v2");
四、编写上层代码
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
int main()
{
int fd;
int cmd;
int data;
fd = open("/dev/pin4",O_RDWR);
if(fd < 0){
printf("open failed\n");
perror("reson:");
exit(-1);
}else{
printf("open success\n");
}
printf("input commnd :1/0 \n1:set pin4 high \n0:set pin4 low\n");
scanf("%d",&cmd);
if(cmd == 1){
data = 1;
}else{
data = 0;
}
printf("data = %d\n",data);
write(fd,&data,1);
close(fd);
return 0;
}
五、编译运行实现功能
1’编译参考博文:树莓派内核驱动编写——添加与调用
2.执行上层,查看GPIO输出
查看GPIO:gpio readall
师承上官可编程 —— 陈立臣

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)