STM32 非接触测温测温传感器 项目记录(ModbusRTU协议)

做过的一个项目,一款远距离测温传感器, ModbusRTU 协议 :
硬件平台:STM32L051
485模块:致远电子 RSM3485
传感器探头: 欧姆龙 D6T I2C通讯
文章意在于对本次项目做个笔记,方便以后再次用到。
- 1
- 2
- 3
- 4
- 5
前言
本文是个人笔记,文章只讲基本流程,再次声明项目记录只是个人笔记……
最后所有的资料原理图和程序都会上传至资源。
一、硬件部分
单品传感器的硬件部分还是很简单的:
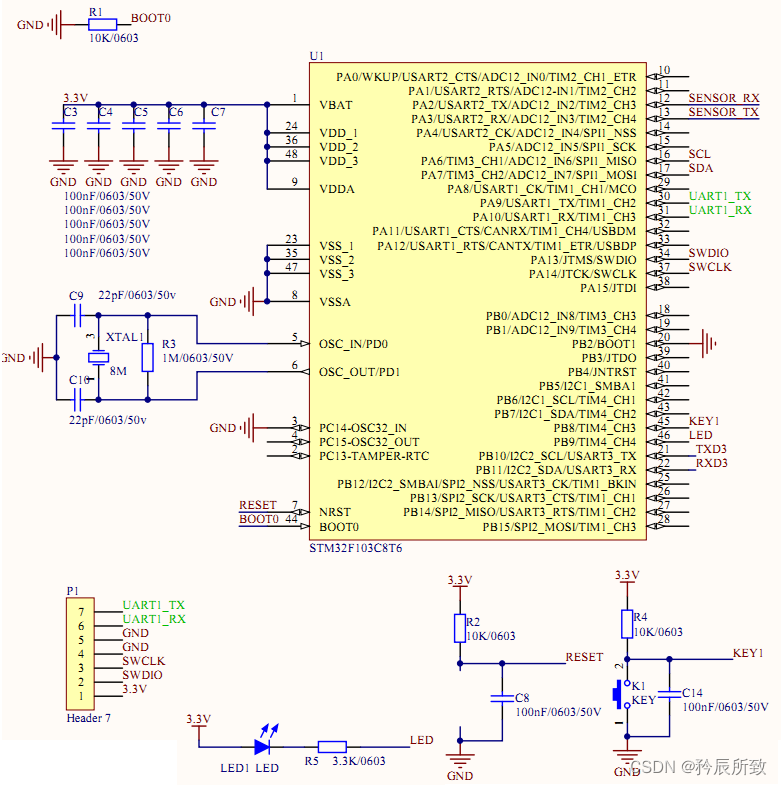
1、STM32L051 和 STM32F103 是 Pin to Pin 的;
2、测温传感器使用的是I2C接口,使用了软件I2C,因为 D6T 是5V供电,所以使用了电平转换电路;
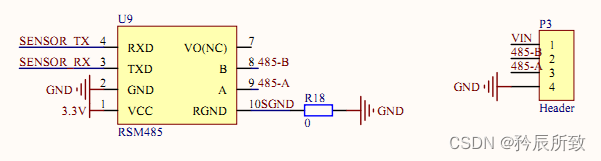
3、整个传感器项目需求是 485 通讯的,因为实际环境要求,所以采用了周立功的 485 模块;
1.1 STM32部分
老样子,最小系统都是一样的:
1.2 传感器部分
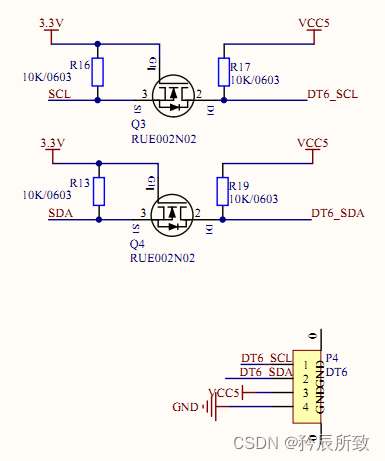
使用了电平转换电路,具体的实现原理和更多的电平转换电路请查看博文:
1.3 485通讯部分
1.4 电源部分

电源部分方案可以有很多种,更多的电源方案请查看博文:
聊聊实际使用的电源转化电路,分享一些不同场合下的转3.3V电路
二、☆软件部分☆
硬件部分是简单的,本项目的核心就在于软件的实现,有2个部分是核心:
1、I2C 通讯驱动;
2、485 通讯驱动;
2.1 传感器 I2C 通讯部分
这里上一下上层调用的函数,具体的驱动细节见下文说明:
void D6T_Measure()
{
u8 D6Tbuff[20];
u8 D6T_Data=0;
// u16 tPEC;
i2c_start();
i2c_send_byte(0X14); //地址,和读写指令
i2c_wait_ack();
delay_us(150); //这里必须加
i2c_send_byte(0X4C);
i2c_wait_ack();
delay_us(150);
i2c_start();
i2c_send_byte(0X15); //地址,读指令
i2c_wait_ack();
delay_us(120);
// D6T44L_ReadLenByte(5); //D6T-1A-02 只有5个数值
u8 t;
D6T_Data=0;
for(t=0;t<(5-1);t++)
{
D6Tbuff[D6T_Data++] = i2c_read_byte(1);
delay_us(120);
}
D6Tbuff[D6T_Data] = i2c_read_byte(0);
delay_us(120);
i2c_stop();
// tPTAT = 256 * D6Tbuff[1] + D6Tbuff[0];
tP = 256 * D6Tbuff[3] + D6Tbuff[2];
}
unsigned char calc_crc(unsigned char data)
{
int index;
unsigned char temp;
for(index=0;index<8;index++){
temp = data;
data <<= 1;
if(temp & 0x80) data ^= 0x07;
}
return data;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
2.2 485 通讯部分
本传感器是作为 485 从机设备,所以需要写一下 ModbusRTU 协议驱动,这里就不墨迹,直接源码奉上:
#include "Modbus_rtu.h"
#include "stdio.h"
void Modbus_check()
{
u16 crc;
u16 receivecrc1;
u16 receivecrc2;
u8 sendbuff[5];
/*
收到了8个数据:01 03 00 10 00 01 D5 CA
USART2_Data = 8;
USART2_BUF[0] ~ USART2_BUF[7] ;
要做校验的数为6个,所以是 USART2_Data - 2;
校验需要计算的是 USART2_BUF[6], USART2_BUF[7]
USART2_BUF[USART2_Data - 2] 和 USART2_BUF[USART2_Data - 1]
*/
crc = Checksum_CRC16(USART2_BUF,USART2_Data - 2);
// printf("crc is :0x%x\r\n",crc);
/*No matter the high bits before or the low bits before*/
receivecrc1 = (USART2_BUF[USART2_Data - 2]<<8) + USART2_BUF[USART2_Data - 1];
receivecrc2 = (USART2_BUF[USART2_Data - 1]<<8) + USART2_BUF[USART2_Data - 2];
// if((lrc == receivelrc2)||(lrc == receivelrc1)){
// if(USART2_BUF[0] == mymodbus_add){
//这里说明一下,先判断地址,然后返回错误,如果先判断校验,如果出错了,那么总线上所有都同时返回就有问题了
if(USART2_BUF[0] == mymodbus_add){
if((crc == receivecrc2)||(crc == receivecrc1)){
switch (USART2_BUF[1]){
case 3:
Modbus_03_ack();
break;
case 6:
Modbus_06_ack();
break;
default:
// printf("An unsupported command!\r\n");//for test
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 2;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
break;
}
}
else{ //校验错误,返回异常
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 0;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
}
}
}
void Modbus_03_ack(){
u16 Register_add; // 2,3
u16 Register_len; // 4,5
u16 crc;
u8 i;
u8 j;
Register_add = (USART2_BUF[2]<<8) + USART2_BUF[3]; //get add;
Register_len = (USART2_BUF[4]<<8) + USART2_BUF[5]; //get len;
u8 sendbuff[Register_len*2 + 5];
/*
如果读取的地址写错了,或者读取长度超过规定的长度
返回错误
*/
if(( 0x0010 <= Register_add)&&( Register_add <= 0x0014 )&&(Register_len < 6)){
i = 0;
sendbuff[i++] = mymodbus_add;
sendbuff[i++] = 0x03;
sendbuff[i++] = Register_len<<1;
switch(Register_add){
case 0x0010:
for(j=0;j<Register_len;j++){
sendbuff[i++]= (u8)(Register_value[0+j]>>8); //发送读取数据字节数的高位
sendbuff[i++]= (u8)Register_value[0+j]; //发送读取数据字节数的低位
}
break;
case 0x0011:
for(j=0;j<Register_len;j++){
sendbuff[i++]= (u8)(Register_value[1+j]>>8);
sendbuff[i++]= (u8)Register_value[1+j];
}
break;
case 0x0012:
for(j=0;j<Register_len;j++){
sendbuff[i++]= (u8)(Register_value[2+j]>>8);
sendbuff[i++]= (u8)Register_value[2+j];
}
break;
case 0x0013:
for(j=0;j<Register_len;j++){
sendbuff[i++]= (u8)(Register_value[3+j]>>8);
sendbuff[i++]= (u8)Register_value[3+j];
}
break;
case 0x0014:
for(j=0;j<Register_len;j++){
sendbuff[i++]= (u8)(Register_value[4+j]>>8);
sendbuff[i++]= (u8)Register_value[4+j];
}
break;
default:break;
}
crc = Checksum_CRC16(sendbuff,i);
sendbuff[i++] = (u8)(crc >> 8);
sendbuff[i++] = (u8)crc;
Uart2_sendBuffer(sendbuff,i);
}
else{//地址不在规定返回或者长度太长,返回错误
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 1;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
}
}
void Modbus_06_ack(){
u16 Register_add; //
u16 val; //
u16 crc;
u8 i;
u8 sendbuff[8] = {0};
if(USART2_Data < 9){
Register_add = (USART2_BUF[2]<<8) + USART2_BUF[3]; //get add;
val = (USART2_BUF[4]<<8) + USART2_BUF[5]; //
if((val > 0)&&(val < 248)){
if(Register_add == 0x0013){
mymodbus_add = val;
Register_value[3] = mymodbus_add;
MY_DATAEEPROM_Program(FLASH_TYPEPROGRAMDATA_BYTE,Modbus_ID_ADDR,mymodbus_add);
i = 0;
sendbuff[i++] = mymodbus_add;
sendbuff[i++] = 0x06;
sendbuff[i++] = (u8)(Register_add>>8);
sendbuff[i++] = (u8)Register_add;
sendbuff[i++] = (u8)(val>>8);
sendbuff[i++] = (u8)val;
crc = Checksum_CRC16(sendbuff,i);
sendbuff[i++] = (u8)(crc >> 8);
sendbuff[i++] = (u8)crc;
Uart2_sendBuffer(sendbuff,i);
}
else{//写地址不在规定范围
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 3;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
}
}else{//写地址不在规定范围
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 4;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
}
}
else{//写地址不在规定范围
sendbuff[0] = mymodbus_add;
sendbuff[1] = 0x80 | USART2_BUF[1];
sendbuff[2] = 1;
crc = Checksum_CRC16(sendbuff,3);
sendbuff[3] = (u8)(crc >> 8);
sendbuff[4] = (u8)crc;
Uart2_sendBuffer(sendbuff,5);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
2.3 其他代码说明
此项目的核心就是上面2个的驱动,其他部分,STM32和一些基本的按键驱动,LED等操作都和以往项目基本一样。
实际上当初我在 FreeRTOS 记录 实例的时候就是使用的这个项目作为说明的,所以从 0 开始的设计思路,细节问题,都在当初的博文中说明了,博文地址如下:
FreeRTOS记录(十、FreeRTOS实现带 I2C 通讯的 ModbusRTU 协议从机实例)(完成)
当然额外说一句,这种 单品传感器 的简单的项目一般来说用不用 RTOS 实际使用上区别不大。
本片记录就到这里。
资源链接:STM32非接触测温传感器项目全资料
文章来源: blog.csdn.net,作者:矜辰所致,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/weixin_42328389/article/details/124794225

- 点赞
- 收藏
- 关注作者
评论(0)