RT-Thread记录(十八、I2C软件包 — 温湿度传感器 SHT21与EEPROM 24C02)

本文学习测试一下几款典型设备的 RT-Thread I2C软件包
- 1
前言
组件与软件包部分之前文章我们学习了 2 个组件: SFUD组件与 AT组件。 RT-Thread 丰富的生态系统,除了一些标准的组件, 还支持各种各样的软件包,上一篇文章我们已经接触过 at_device 软件包。在实际应用中很多常用的设备,都有开发者已经写好了软件包,我们可以直接添加到自己的工程使用。
本文我们就以我们常用的 I2C 设备为例,说明一下软件包的使用方式。
专栏更新到这里已经可以结尾了,组件与软件包我们只做使用记录说明,目的在于介绍一下如何使用现成的组件和软件包, 所有的包中都有作者写的 README 文件,这是最权威也最值得参考的文件,大家都可以看到说明和使用方式。
说明,本文的 I2C 接口为软件 I2C。
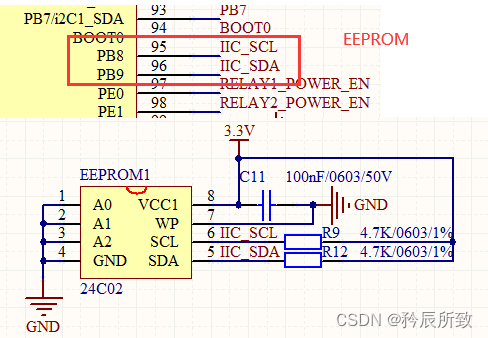
在开发板上,我们有2个 I2C 设备,一个是 EEPROM 24C02 和 一个 温湿度传感器 SHT21。
EEPROM:
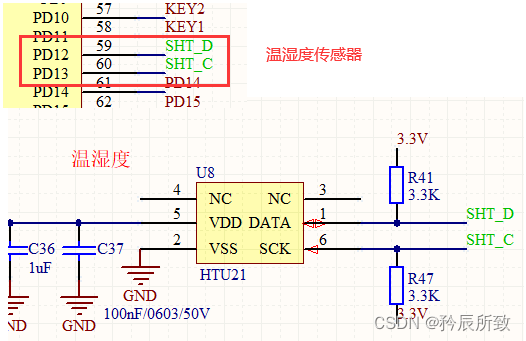
温湿度传感器:
在 RT-Thread 专栏应用篇中,我们已经实现过 I2C 代码的移植,成功读取到了 温湿度的数据,这里我再次测试,是通过 RT-Thread 软件包的使用实现数据读取。
❤️
本 RT-Thread 专栏记录的开发环境:
RT-Thread记录(一、RT-Thread 版本、RT-Thread Studio开发环境 及 配合CubeMX开发快速上手)
RT-Thread记录(二、RT-Thread内核启动流程 — 启动文件和源码分析)
❤️
RT-Thread 内核篇系列博文链接:
RT-Thread记录(三、RT-Thread 线程操作函数及线程管理与FreeRTOS的比较)
RT-Thread记录(四、RT-Thread 时钟节拍和软件定时器)
RT-Thread记录(五、RT-Thread 临界区保护)
RT-Thread记录(六、IPC机制之信号量、互斥量和事件集)
RT-Thread记录(七、IPC机制之邮箱、消息队列)
RT-Thread记录(八、理解 RT-Thread 内存管理)
RT-Thread记录(九、RT-Thread 中断处理与阶段小结)
❤️
在STM32L051C8 上使用 RT-Thread 应用篇系列博文连接:
RT-Thread 应用篇 — 在STM32L051上使用 RT-Thread (一、无线温湿度传感器 之 新建项目)
RT-Thread 应用篇 — 在STM32L051上使用 RT-Thread (二、无线温湿度传感器 之 CubeMX配置)
RT-Thread 应用篇 — 在STM32L051上使用 RT-Thread (三、无线温湿度传感器 之 I2C通讯)
RT-Thread 应用篇 — 在STM32L051上使用 RT-Thread (四、无线温湿度传感器 之 串口通讯)
❤️
RT-Thread 设备篇系列博文链接:
RT-Thread记录(十、全面认识 RT-Thread I/O 设备模型)
RT-Thread记录(十一、I/O 设备模型之UART设备 — 源码解析)
RT-Thread记录(十二、I/O 设备模型之UART设备 — 使用测试)
RT-Thread记录(十三、I/O 设备模型之PIN设备)
RT-Thread记录(十四、I/O 设备模型之ADC设备)
RT-Thread记录(十五、I/O 设备模型之SPI设备)
❤️
RT-Thread 组件与软件包系列博文链接:
RT-Thread记录(十六、SFUD组件 — SPI Flash的读写)
RT-Thread记录(十七、AT组件 — ESP8266使用 at_device 软件包联网)
一、RT-Thread I2C 总线注册
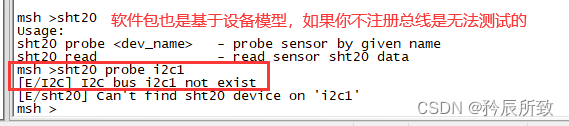
我们以前博文讲过,RT-Thread 组件和软件包基本都是基于 RT-Thread 的设备模型,和前面讲的 SPI 设备类似,I2C 设备软件包的使用也需要先注册 I2C 总线设备到 RT-Thread 的设备管理器。
如果没有注册总线,是无法使用软件包的,比如温湿度传感器的 sht2x 软件包测试如下:
.
1.1 I2C 设备使用步骤
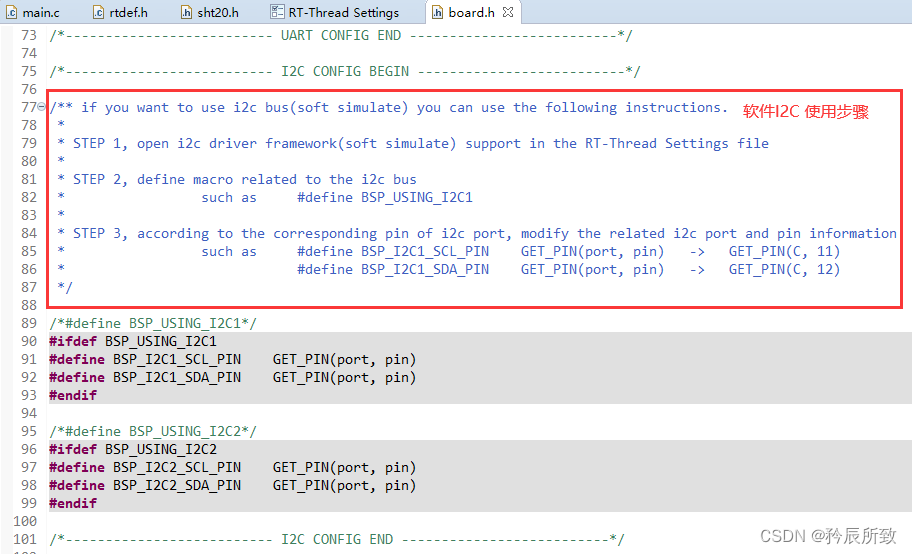
有了以前的学习,注册 I2C 总线对我们来说已经是小菜一碟,直接在board.h中查看软件 I2C 使用步骤:
1、首先,在 RT-Thread Studio 工程中,打开 RT-Thread Settings,使能 软件I2C 驱动,如下图所示:

.
2、根据说明和原理图修改宏定义:
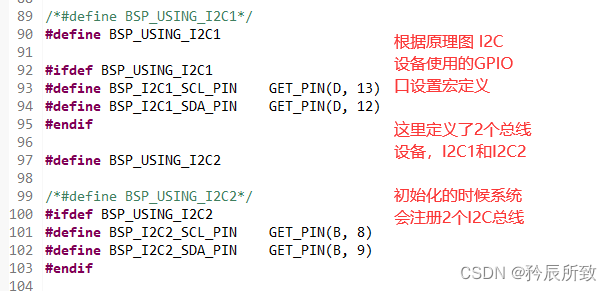
.
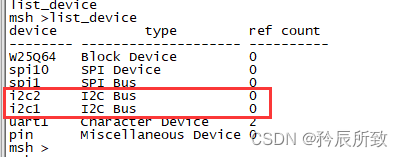
只需要上面2步,I2C 设备的使用前提就准备好了,我们把程序烧录开发本,就可以看到系统在初始化的时候已经自动注册好了2个 I2C 总线:
(出问题了,并没有i2c 总线设备!!!!!!)
.
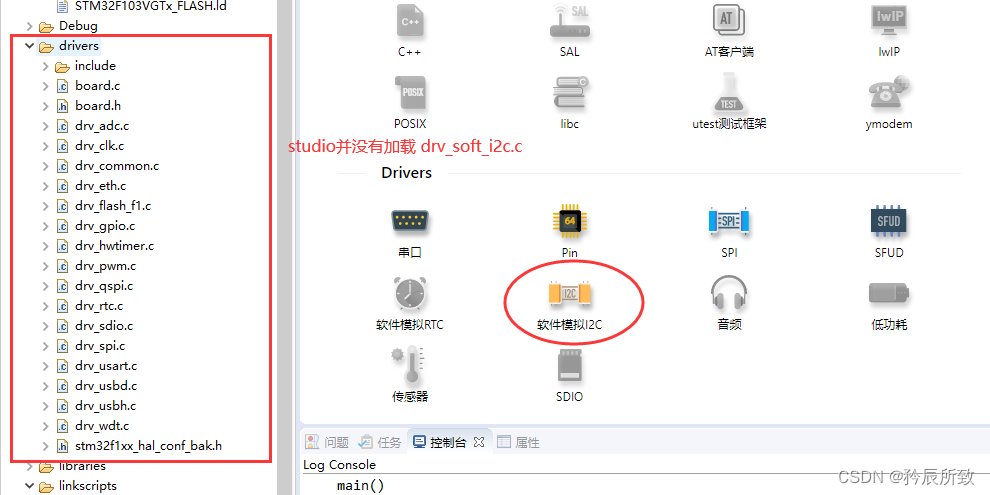
1.2 检查问题
上面使用 I2C 设备使能,一切看上去都是没问题了:

我一开始很懵,这么简单的操作我哪里会出问题了,想了很久,然后还搞不明白为什么初始化不会注册i2c总线,最后还是得去看驱动代码?
但是压根没有看到注册总线的驱动函数……
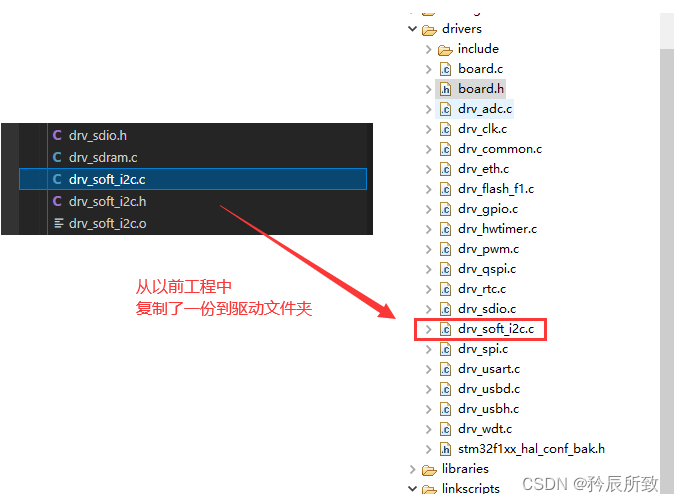
(后面发现并不是studio的问题,应该是自己很久以前的误操作,删除了文件……)
………… 花了 …… 好多时间……

.
最后我直接从以前的工程中复制了一份文件进来:
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-11-08 balanceTWK first version
*/
#include <board.h>
#include "drv_soft_i2c.h"
#include "drv_config.h"
#ifdef RT_USING_I2C
//#define DRV_DEBUG
#define LOG_TAG "drv.i2c"
#include <drv_log.h>
#if !defined(BSP_USING_I2C1) && !defined(BSP_USING_I2C2) && !defined(BSP_USING_I2C3) && !defined(BSP_USING_I2C4)
#error "Please define at least one BSP_USING_I2Cx"
/* this driver can be disabled at menuconfig → RT-Thread Components → Device Drivers */
#endif
static const struct stm32_soft_i2c_config soft_i2c_config[] =
{
#ifdef BSP_USING_I2C1
I2C1_BUS_CONFIG,
#endif
#ifdef BSP_USING_I2C2
I2C2_BUS_CONFIG,
#endif
#ifdef BSP_USING_I2C3
I2C3_BUS_CONFIG,
#endif
#ifdef BSP_USING_I2C4
I2C4_BUS_CONFIG,
#endif
};
static struct stm32_i2c i2c_obj[sizeof(soft_i2c_config) / sizeof(soft_i2c_config[0])];
/**
* This function initializes the i2c pin.
*
* @param Stm32 i2c dirver class.
*/
static void stm32_i2c_gpio_init(struct stm32_i2c *i2c)
{
struct stm32_soft_i2c_config* cfg = (struct stm32_soft_i2c_config*)i2c->ops.data;
rt_pin_mode(cfg->scl, PIN_MODE_OUTPUT_OD);
rt_pin_mode(cfg->sda, PIN_MODE_OUTPUT_OD);
rt_pin_write(cfg->scl, PIN_HIGH);
rt_pin_write(cfg->sda, PIN_HIGH);
}
/**
* This function sets the sda pin.
*
* @param Stm32 config class.
* @param The sda pin state.
*/
static void stm32_set_sda(void *data, rt_int32_t state)
{
struct stm32_soft_i2c_config* cfg = (struct stm32_soft_i2c_config*)data;
if (state)
{
rt_pin_write(cfg->sda, PIN_HIGH);
}
else
{
rt_pin_write(cfg->sda, PIN_LOW);
}
}
/**
* This function sets the scl pin.
*
* @param Stm32 config class.
* @param The scl pin state.
*/
static void stm32_set_scl(void *data, rt_int32_t state)
{
struct stm32_soft_i2c_config* cfg = (struct stm32_soft_i2c_config*)data;
if (state)
{
rt_pin_write(cfg->scl, PIN_HIGH);
}
else
{
rt_pin_write(cfg->scl, PIN_LOW);
}
}
/**
* This function gets the sda pin state.
*
* @param The sda pin state.
*/
static rt_int32_t stm32_get_sda(void *data)
{
struct stm32_soft_i2c_config* cfg = (struct stm32_soft_i2c_config*)data;
return rt_pin_read(cfg->sda);
}
/**
* This function gets the scl pin state.
*
* @param The scl pin state.
*/
static rt_int32_t stm32_get_scl(void *data)
{
struct stm32_soft_i2c_config* cfg = (struct stm32_soft_i2c_config*)data;
return rt_pin_read(cfg->scl);
}
/**
* The time delay function.
*
* @param microseconds.
*/
static void stm32_udelay(rt_uint32_t us)
{
rt_uint32_t ticks;
rt_uint32_t told, tnow, tcnt = 0;
rt_uint32_t reload = SysTick->LOAD;
ticks = us * reload / (1000000 / RT_TICK_PER_SECOND);
told = SysTick->VAL;
while (1)
{
tnow = SysTick->VAL;
if (tnow != told)
{
if (tnow < told)
{
tcnt += told - tnow;
}
else
{
tcnt += reload - tnow + told;
}
told = tnow;
if (tcnt >= ticks)
{
break;
}
}
}
}
static const struct rt_i2c_bit_ops stm32_bit_ops_default =
{
.data = RT_NULL,
.set_sda = stm32_set_sda,
.set_scl = stm32_set_scl,
.get_sda = stm32_get_sda,
.get_scl = stm32_get_scl,
.udelay = stm32_udelay,
.delay_us = 1,
.timeout = 100
};
/**
* if i2c is locked, this function will unlock it
*
* @param stm32 config class
*
* @return RT_EOK indicates successful unlock.
*/
static rt_err_t stm32_i2c_bus_unlock(const struct stm32_soft_i2c_config *cfg)
{
rt_int32_t i = 0;
if (PIN_LOW == rt_pin_read(cfg->sda))
{
while (i++ < 9)
{
rt_pin_write(cfg->scl, PIN_HIGH);
stm32_udelay(100);
rt_pin_write(cfg->scl, PIN_LOW);
stm32_udelay(100);
}
}
if (PIN_LOW == rt_pin_read(cfg->sda))
{
return -RT_ERROR;
}
return RT_EOK;
}
/* I2C initialization function */
int rt_hw_i2c_init(void)
{
rt_size_t obj_num = sizeof(i2c_obj) / sizeof(struct stm32_i2c);
rt_err_t result;
for (int i = 0; i < obj_num; i++)
{
i2c_obj[i].ops = stm32_bit_ops_default;
i2c_obj[i].ops.data = (void*)&soft_i2c_config[i];
i2c_obj[i].i2c2_bus.priv = &i2c_obj[i].ops;
stm32_i2c_gpio_init(&i2c_obj[i]);
result = rt_i2c_bit_add_bus(&i2c_obj[i].i2c2_bus, soft_i2c_config[i].bus_name);
RT_ASSERT(result == RT_EOK);
stm32_i2c_bus_unlock(&soft_i2c_config[i]);
LOG_D("software simulation %s init done, pin scl: %d, pin sda %d",
soft_i2c_config[i].bus_name,
soft_i2c_config[i].scl,
soft_i2c_config[i].sda);
}
return RT_EOK;
}
INIT_BOARD_EXPORT(rt_hw_i2c_init);
#endif /* RT_USING_I2C */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
然后就一切正常了:
最开始我以为是设置问题,当时陷入里面想不明白,隔了几天回头想想,好像是以前博客中有人问我加载软件包没用,我自己测试了一下给了回复,但是当时还是 RT-Thread 记录专栏刚开始,不需要用到软件包,然后自己因为一些警告误删除了 这个文件 (灬ꈍ ꈍ灬)…
到头来想起来原来还是自己曾经的误操作… 尴尬…… 这种问题确实在实际中会遇到……,所以提醒一下自己。
.
二、温湿度传感器软件包
前面的莫名的问题太影响心情了,缓一缓希望接下来一切顺利。
2.1 添加及基本测试
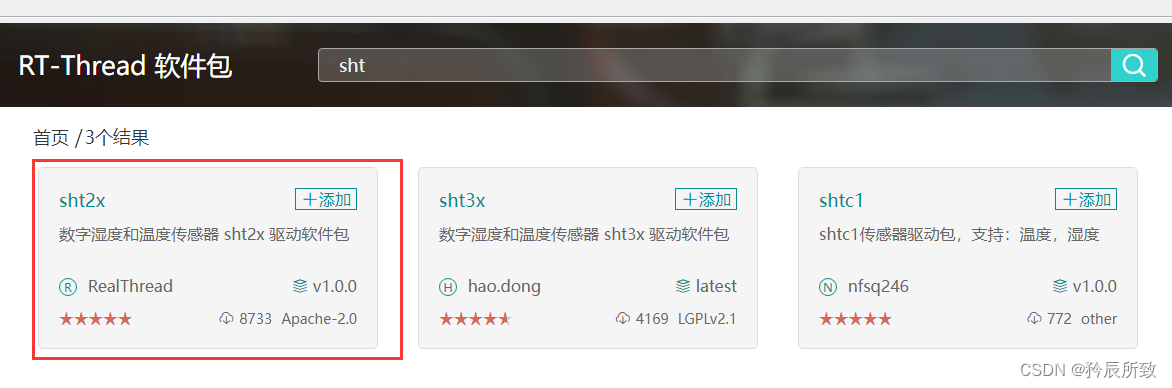
对于我们使用的温湿度传感器,原理图上画的是 HTU21D ,是和 sht21 pin to pin 的程序也一样的温湿度传感器,我们在软件包中心找到 sht2x 软件包,如下图:
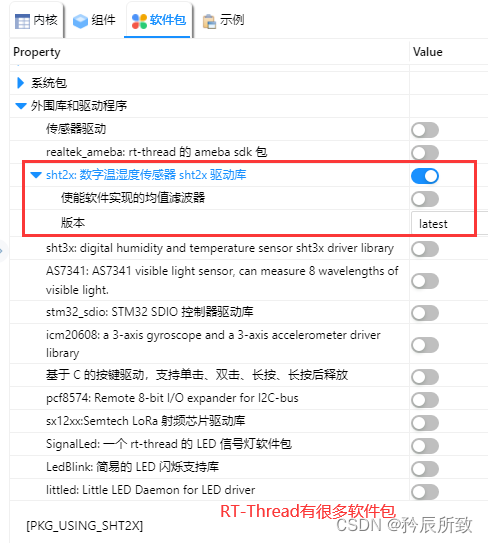
软件包并不需要过多的设置:
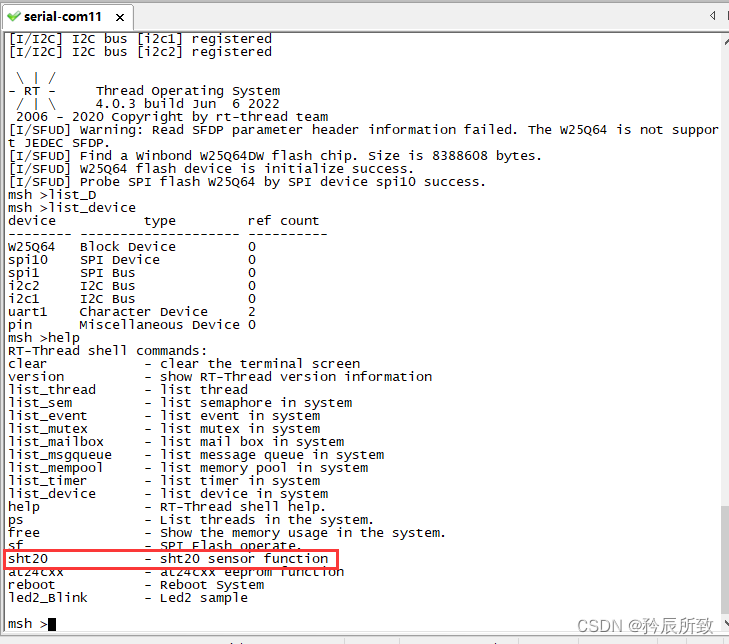
添加软件包完成,保存后重新编译工程烧录,可以看到有 sht20 的指令:
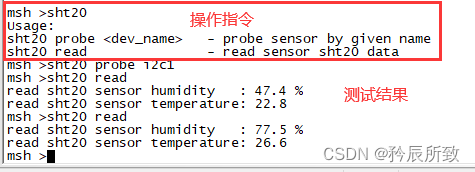
温湿度读取测试:
2.2 程序中使用
上面我们通过命令行测试了软件包,使用起来感觉特别简单是不是,那么我们在程序中怎么调用呢?
从软件包的说明文档里面可以查看到他的操作API(只看我们测试用到的几个):
/*
根据总线名称,自动初始化对应的 SHT20 设备
参数 描述
name i2c 设备名称
返回 描述
!= NULL 将返回 sht20 设备对象
= NULL 查找失败
*/
sht20_device_t sht20_init(const char *i2c_bus_name)
/*
读取温度
参数 描述
dev sht20 设备对象
返回 描述
!= 0.0 测量温度值
=0.0 测量失败
*/
float sht20_read_temperature(sht20_device_t dev)
/*
读取湿度
参数 描述
dev sht20设备对象
返回 描述
!= 0.0 测量湿度值
=0.0 测量失败
*/
float sht20_read_humidity(sht20_device_t dev)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
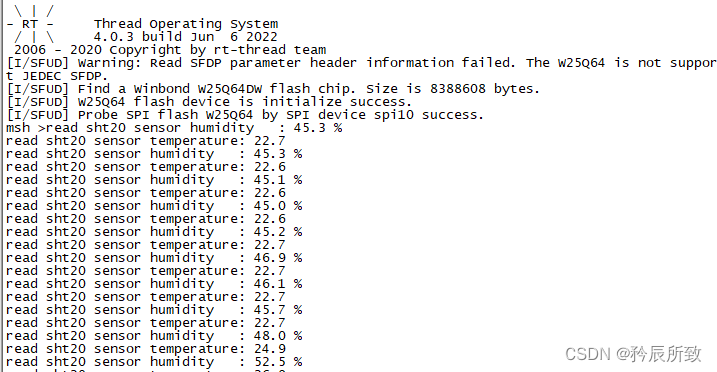
我们用图文的方式说明一下,还是很简单的:
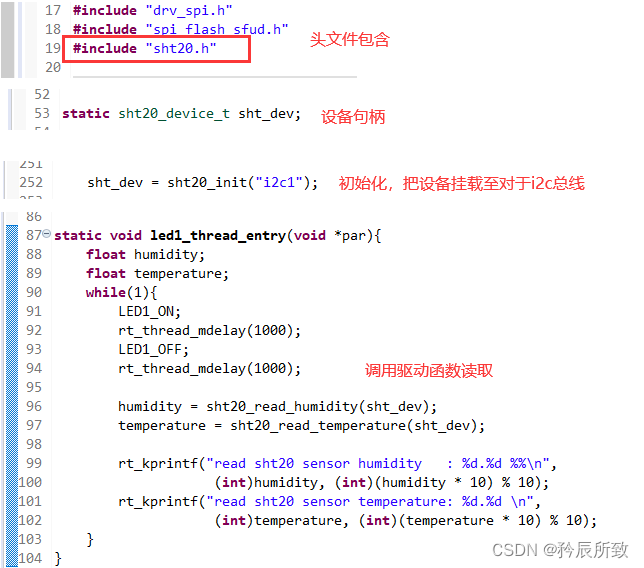
测试结果:
三、EEPROM 软件包
我们用的EEPROM 24C02,也有对应的软件包,有了上面传感器的例子,我们使用起来就很顺手了。
3.1 添加及基本测试
我们在软件包中心找到 at24cxx 软件包,如下图
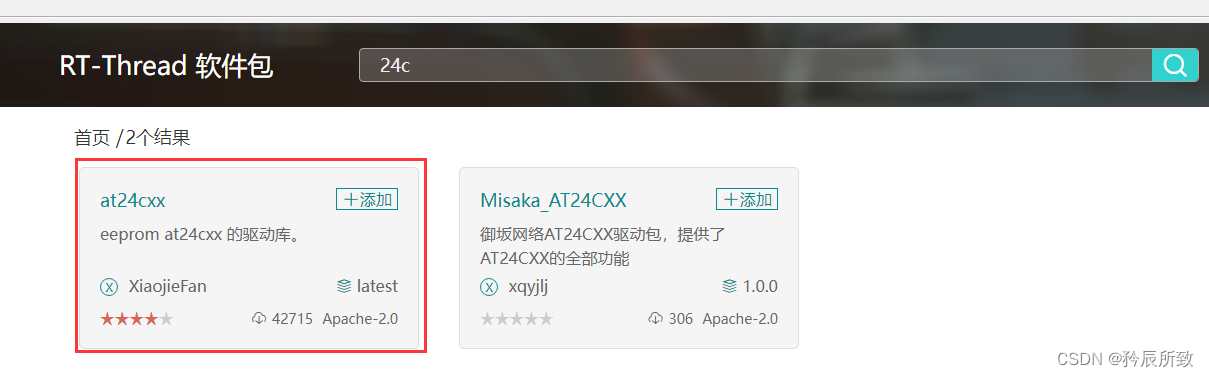
软件包并不需要过多的设置:

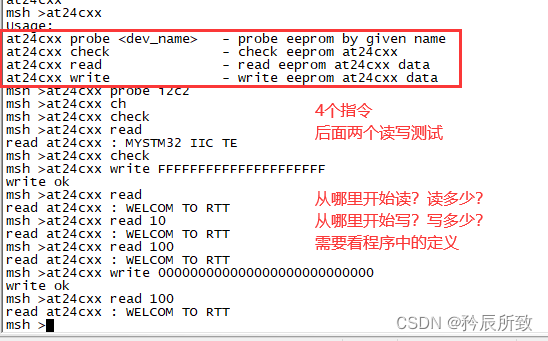
添加软件包完成,保存后重新编译工程烧录,可以看到有 at24cxx 的指令:
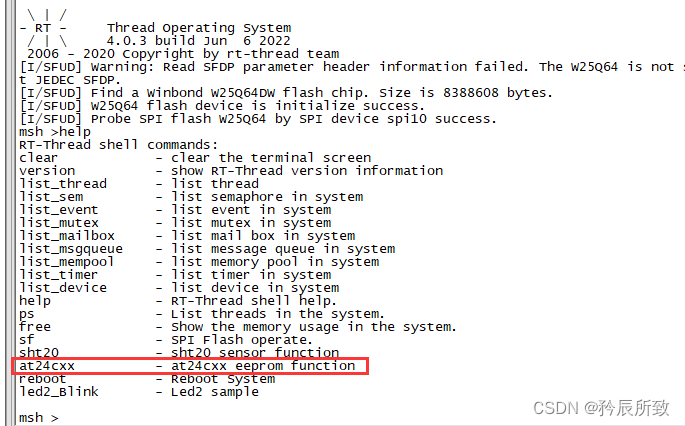
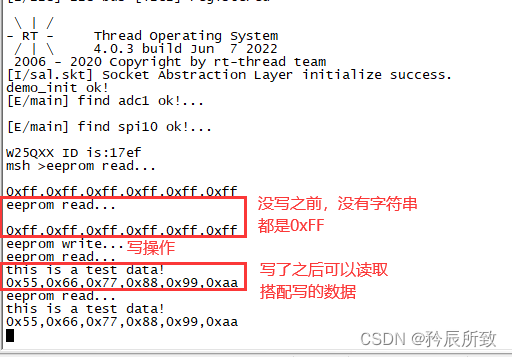
EEPROM读取测试:
这个指令读取有点小疑问,还不确定是从哪里开始读,读多少,也不知道从哪里开始写,写多少。
但是没有关系,我们如果在程序中使用,是直接调用软件包提供的 API。
3.2 程序中使用
从软件包的说明文档里面可以查看到他的操作API,或者直接找软件包的文件:
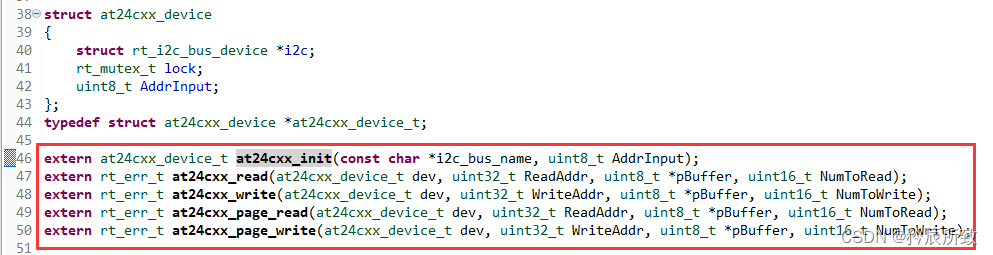
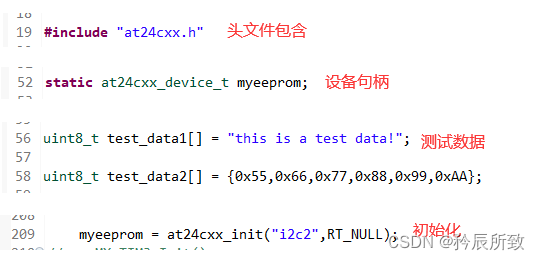
这几个函数比较简单,从函数声明都能知道其使用方法,我们用图文的方式说明一下,首先是初始化:
接着是读写操作:
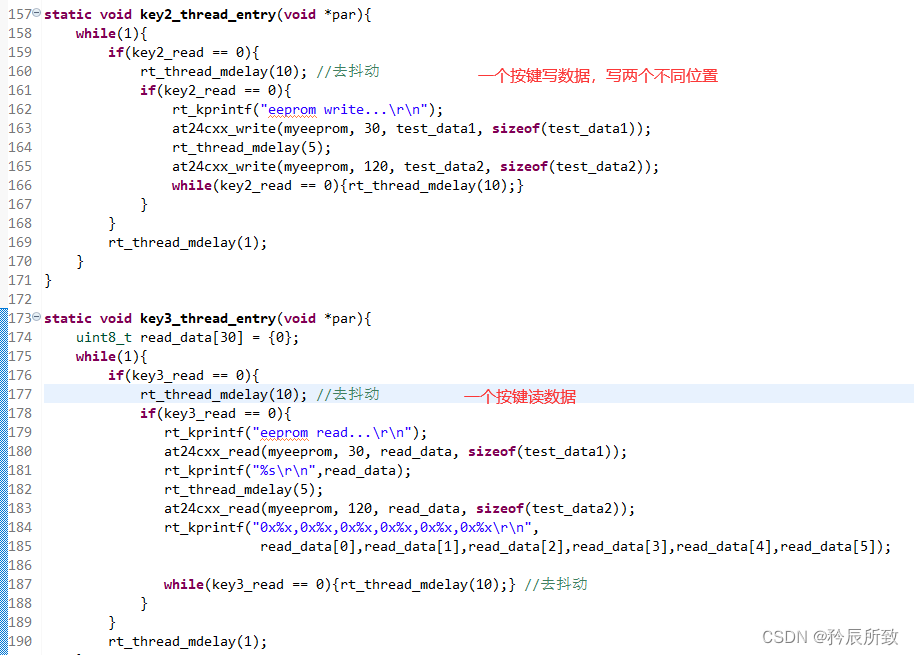
测试结果:
结语
本文应该是很简单的软件包使用测试,没想到和上一篇文章一样,测试起来都不是那么顺利,各种坎坷 = =!
❤️
也正是说明不管东西有多简单,在实际使用过程中,难免会遇到一些意想不到的问题,理论知识是我们的立根之本,但是实际的操作才能让我们历经洗礼!
❤️
RT-Thread 组件与软件包部分使用的方式都差不多,我们暂时就更新这些,那么到目前为止 RT-Thread 专栏部分的内容也差不多可以完结了,有理论,有问题,有测试,有应用。
❤️
如果后期还有比较典型的应用,我会继续把专栏完善,希望大家多多支持!谢谢!
文章来源: blog.csdn.net,作者:矜辰所致,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/weixin_42328389/article/details/125163314

- 点赞
- 收藏
- 关注作者
评论(0)