固态激光雷达:扫地机器人的旋转激光雷达的三角测距示意原理与分析

【摘要】
固态激光雷达:扫地机器人的旋转激光雷达的三角测距示意原理与分析
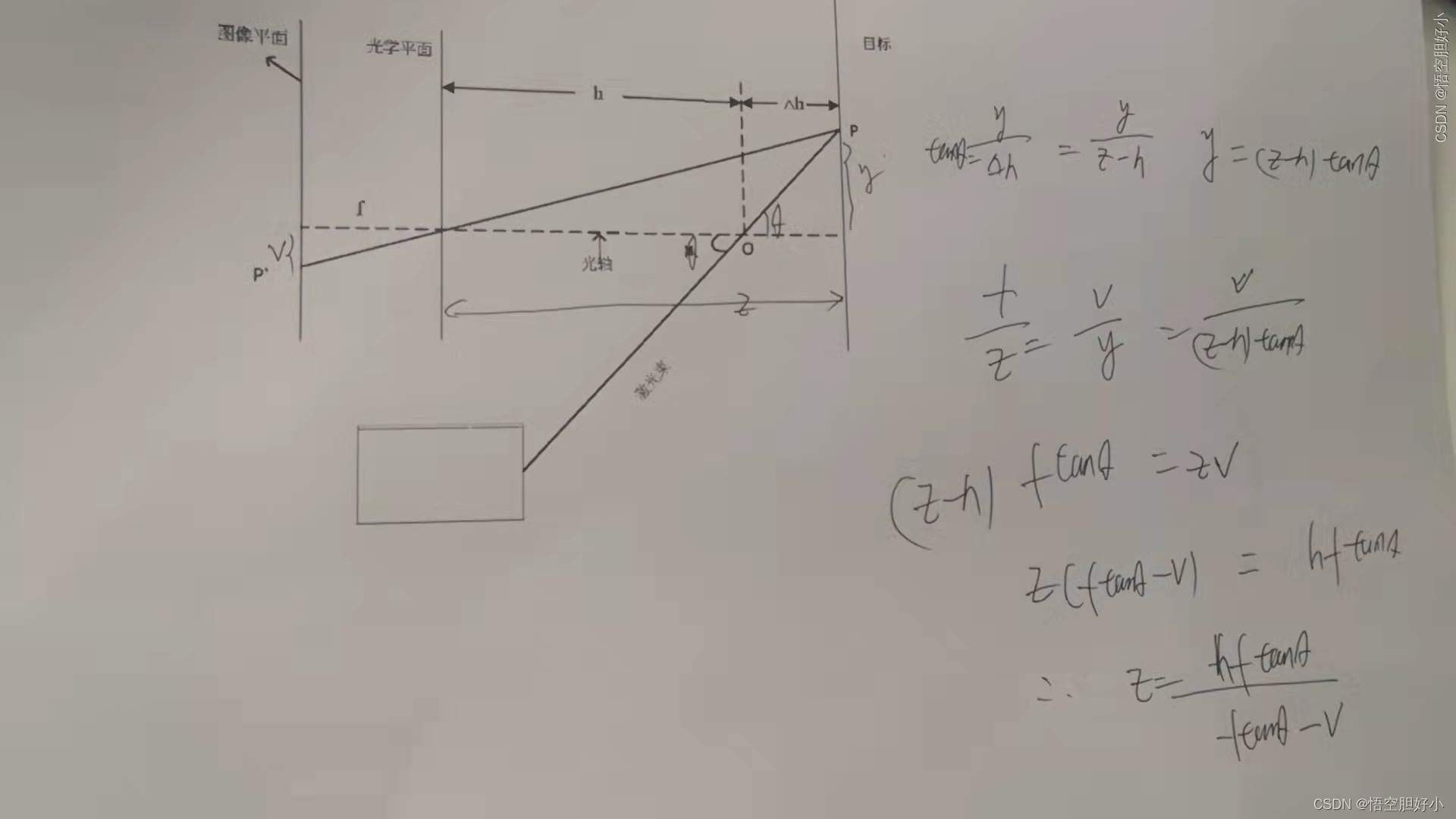
三角测量的原理是:激光束和cammer sernsor光轴之间的夹角为θ,交点为O。 所述激光束投射到障碍物,形成点P。P’为P点的镜像。...
固态激光雷达:扫地机器人的旋转激光雷达的三角测距示意原理与分析
三角测量的原理是:激光束和cammer sernsor光轴之间的夹角为θ,交点为O。
所述激光束投射到障碍物,形成点P。P’为P点的镜像。
O点到光心平面的垂直距离为h,P点到O点的垂直距离为Δh。
v是点P’到成像平面u轴的距离,z为点P到光心平面的垂直距离。
相机的焦距为f。于是有下图
结构光(一线结构光)算法包括激光线提取以及三角测量解算两个部分,
所述激光线提取具体是通过背景建模方式来提取激光线,所述背景建模方式具体是比较成像传感器相邻两帧的成像数据,当采集像素数据在两帧间的差异大于给定阈值时,则判定该像素位于激光线候选区域;所述三角测量解算具体是针对成像传感器上的属于激光线的每一个亚像素点,通过三角测量原理解算出其在空间中的三维坐标。
如果觉得对你有帮助,手动点击关注我的博客哦,获取最新技术文章信息与海量资源~
文章来源: blog.csdn.net,作者:悟空胆好小,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/xushx_bigbear/article/details/124052297

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)