清洁机器人--红外下视传感器,检测是否存在地面距离突变的情形

【摘要】
清洁机器人–红外下视传感器,检测是否存在地面距离突变的情形
通过发射和接收红外信号的原理,检测此时是否处于悬空的状态, 这样来作为防跌传感器。
包括红外激光发射装置和红外感光器件;红外激光发射装置通过...
清洁机器人–红外下视传感器,检测是否存在地面距离突变的情形
通过发射和接收红外信号的原理,检测此时是否处于悬空的状态,
这样来作为防跌传感器。
包括红外激光发射装置和红外感光器件;红外激光发射装置通过脉冲发出激光,打到地面,地面发生漫反射,红外感光器件无法收到反射光线时,则判断行驶的高度不是安全距离,需要后退或避让。
红外下视 ,发射红外的频率500 hz,占空比 10%
10%占空比提高红外灯寿命
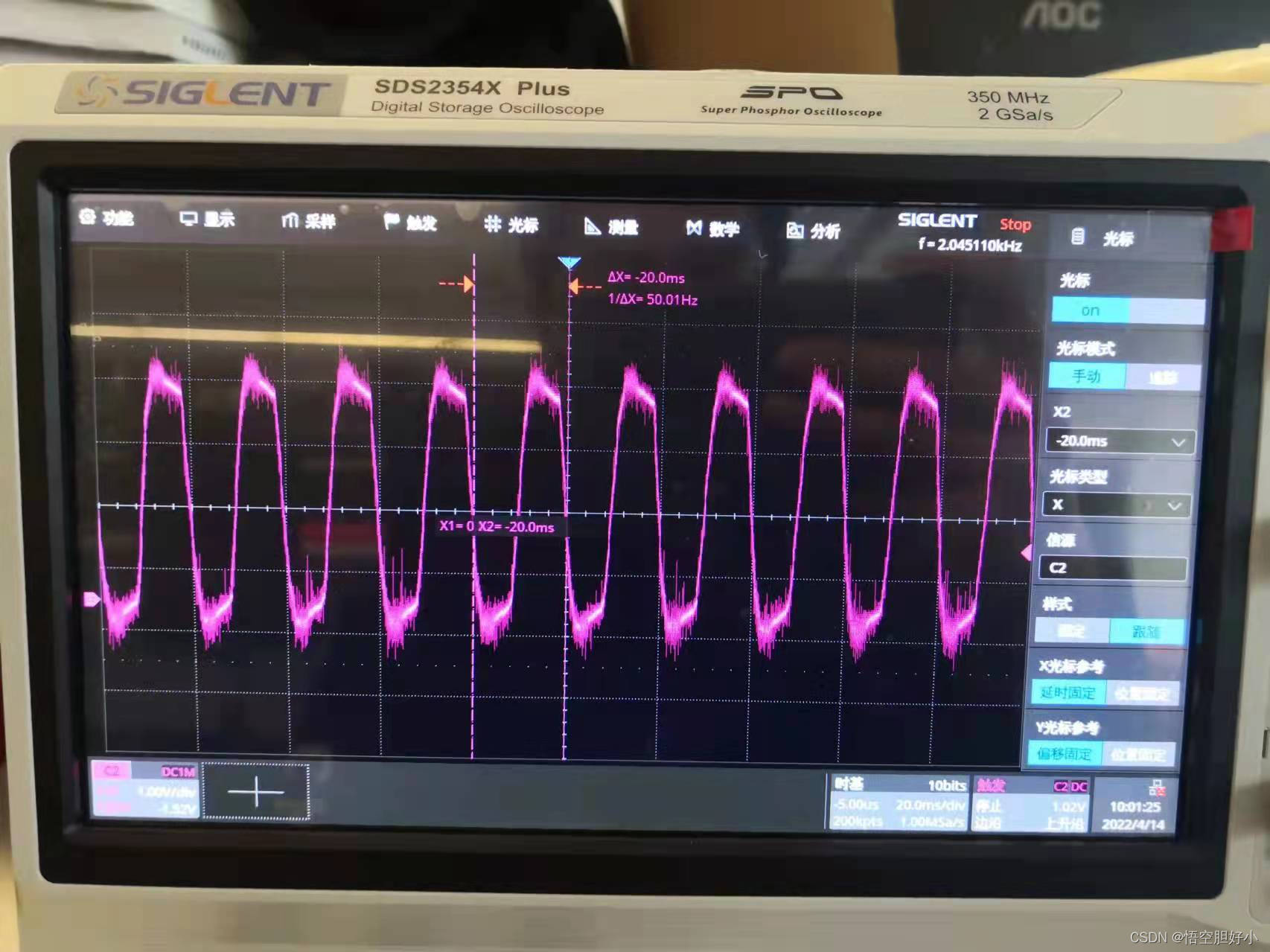
500hz是行为存在板载电容,确保接收端可以拉低,原先KHZ如20khz太高频率,接收端无法拉低
文章来源: blog.csdn.net,作者:悟空胆好小,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/xushx_bigbear/article/details/124285787

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)