RT-Thread记录(六、IPC机制之信号量、互斥量和事件集)

上文说到 RT-Thread 对临界区的处理方式有多种,其中已经分析了关闭调度器和屏蔽中断的方式,
本文就来学学另外的线程同步方式。
前言
在我们专栏前面的文章中,已经学习过 RT-Thread 线程操作函数、软件定时器、临界区的保护,我们都进行了一些底层的分析,能让我们更加理解 RT-Thread 的内核,但是也不要忽略了上层的函数使用 要理解 RT-Thread 面向对象的思想,对所有的这些线程啊,定时器,包括要介绍的信号量,邮箱这些,都是以 对象 来操作,直白的说来就是 对于所有这些对象,都是以结构体的形式来表示,然后通过对这个对象结构体的操作来进行的。
本文所要介绍的内容属于 IPC机制,这些内容相对来说比较简单,我们重点在于学会如何使用以及了解他们的使用场合。
本 RT-Thread 专栏记录的开发环境:
RT-Thread记录(一、RT-Thread 版本、RT-Thread Studio开发环境 及 配合CubeMX开发快速上手)
RT-Thread记录(二、RT-Thread内核启动流程 — 启动文件和源码分析
RT-Thread 内核篇系列博文链接:
RT-Thread记录(三、RT-Thread 线程操作函数及线程管理与FreeRTOS的比较)
RT-Thread记录(四、RT-Thread 时钟节拍和软件定时器)
RT-Thread记录(五、RT-Thread 临界区保护)
一、IPC机制
在嵌入式操作系统中,运行代码主要包括线程 和 ISR,在他们的运行过程中,因为应用或者多线程模型带来的需求,有时候需要同步,有时候需要互斥,有时候也需要彼此交换数据。操作系统必须提供相应的机制来完成这些功能,这些机制统称为 线程间通信(IPC机制)。
本文所要介绍的就是关于线程同步的信号量、互斥量、事件 也属于 IPC机制。
RT-Thread 中的 IPC机制包括信号量、互斥量、事件、邮箱、消息队列。对于学习 RT-Thread ,这些IPC机制我们必须要学会灵活的使用。
为什么要说一下这个IPC机制?
我们前面说到过,RT-Thread 面向对象的思想,所有的这些 IPC 机制都被当成一个对象,都有一个结构体控制块,我们用信号量结构体来看一看:
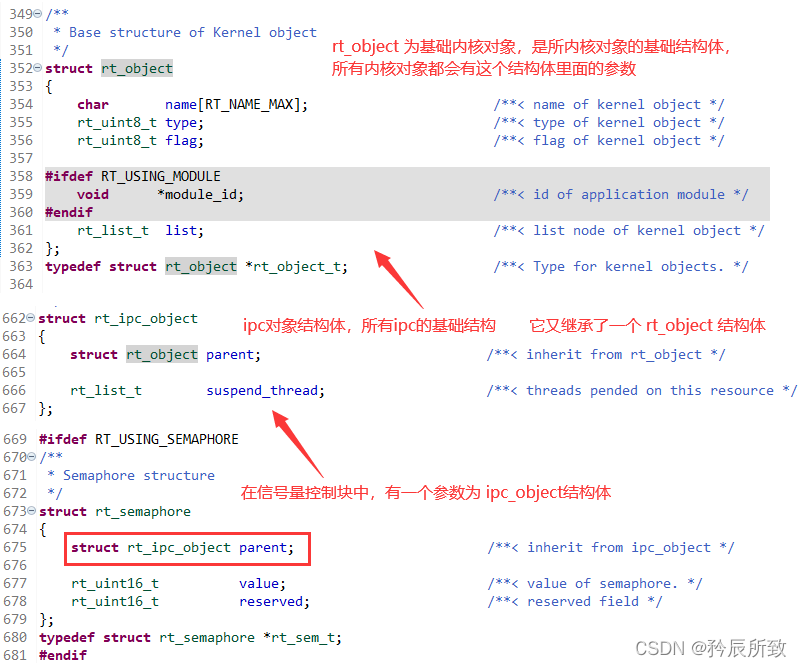
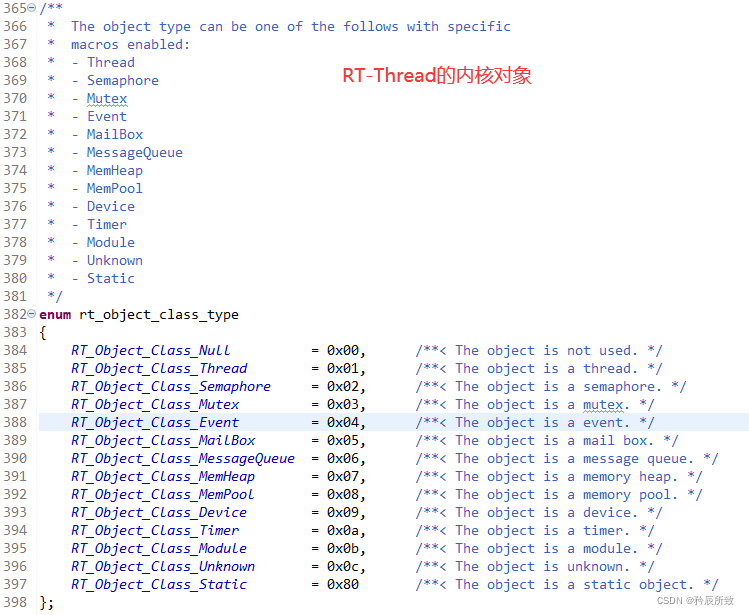
Kernel object有哪些,我们可以从基础内核对象结构体定义下面的代码找到:
本节说明了 RT-Thread 的 IPC 机制,同时通过 信号量的结构体控制块再一次的认识了 RT-Thread 面向对象的设计思想。
在我的 FreeRTOS 专栏中,对于FreeRTOS 的信号量,互斥量,事件集做过说明和测试。在这个部分,实际上 RT-Thread 与 FreeRTOS 是类似的,都是一样的思想。所以如果属熟悉FreeRTOS的话,这部分是简单的,我们要做的就是记录一下 对象的控制块,和操作函数,加以简单的示例测试。
二、信号量
信号量官方的说明是:信号量是一种轻型的用于解决线程间同步问题的内核对象,线程可以获取或释放它,从而达到同步或互斥的目的。
信号量非常灵活,可以使用的场合也很多:
- 比如 一个典型的应用场合就是停车位模型,总共有多少个车位,就是多少个信号量,入口进入一辆车信号量-1,出口离开一辆车信号量+1。
- 比如 两个线程之间的同步,信号量的值初始化成 0,而尝试获得该信号量的线程,一定需要等待另一个释放信号量的线程先执行完。
在 FreeRTOS 中存在二值信号量,但是 RT-Thread 中已经没有了,官方有说明:

信号量记住一句话基本就可以,释放一次信号量就+1,获取一次就-1,如果信号量数据为0,那么尝试获取的线程就会挂机,直到有线程释放信号量使得信号量大于0。
2.1 信号量控制块
老规矩用源码,解释看注释(使用起来也方便复制 ~ ~!):
#ifdef RT_USING_SEMAPHORE
/**
* Semaphore structure
* value 信号量的值,直接表明目前信号量的数量
*/
struct rt_semaphore
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
rt_uint16_t value; /**< value of semaphore. */
rt_uint16_t reserved; /**< reserved field */
};
/*
rt_sem_t 是指向 semaphore 结构体的指针类型
*/
typedef struct rt_semaphore *rt_sem_t;
#endif
2.2 信号量操作
2.2.1 创建和删除
同以前的线程那些一样,动态的方式,先定义一个信号量结构体的指针变量,接收创建好的句柄。
创建信号量:
/*
参数的含义:
1、name 信号量名称
2、value 信号量初始值
3、flag 信号量标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO
返回值:
信号量创建成功,返回信号量的控制块指针
信号量创建失败,返回RT_BULL
*/
rt_sem_t rt_sem_create(const char *name, rt_uint32_t value, rt_uint8_t flag)
对于最后的参数 flag,决定了当信号量不可用时(就是当信号量为0的时候),多个线程等待的排队方式。只有RT_IPC_FLAG_FIFO (先进先出)或 RT_IPC_FLAG_PRIO(优先级等待)两种 flag。
关于用哪一个,要看具体的情况,官方有特意说明:

删除信号量:
/*
参数:
sem rt_sem_create() 创建的信号量对象,信号量句柄
返回值:
RT_EOK 删除成功
*/
rt_err_t rt_sem_delete(rt_sem_t sem)
2.2.2 初始化和脱离
静态的方式,先定义一个信号量结构体,然后对他进行初始化。
初始化信号量:
/**
参数的含义:
1、sem 信号量对象的句柄,就是开始定义的信号量结构体变量
2、name 信号量名称
3、value 信号量初始值
4、flag 信号量标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO
返回值:
RT_EOK 初始化成功
*/
rt_err_t rt_sem_init(rt_sem_t sem,
const char *name,
rt_uint32_t value,
rt_uint8_t flag)
脱离信号量:
/*
参数:
sem 信号量对象的句柄
返回值:
RT_EOK 脱离成功
*/
rt_err_t rt_sem_detach(rt_sem_t sem);
2.2.3 获取信号量
当信号量值大于零时,线程将获得信号量,并且相应的信号量值会减 1。
/**
参数:
1、sem 信号量对象的句柄
2、time 指定的等待时间,单位是操作系统时钟节拍(OS Tick)
返回值:
RT_EOK 成功获得信号量
-RT_ETIMEOUT 超时依然未获得信号量
-RT_ERROR 其他错误
*/
rt_err_t rt_sem_take(rt_sem_t sem, rt_int32_t time)
注意!要等待的时间是系统时钟节拍(OS Tick)。
无等待获取信号量:
//就是上面获取的等待时间为0的方式
rt_err_t rt_sem_trytake(rt_sem_t sem)
{
return rt_sem_take(sem, 0);
}
当线程申请的信号量资源实例为0时,直接返回 - RT_ETIMEOUT。
2.2.4 释放信号量
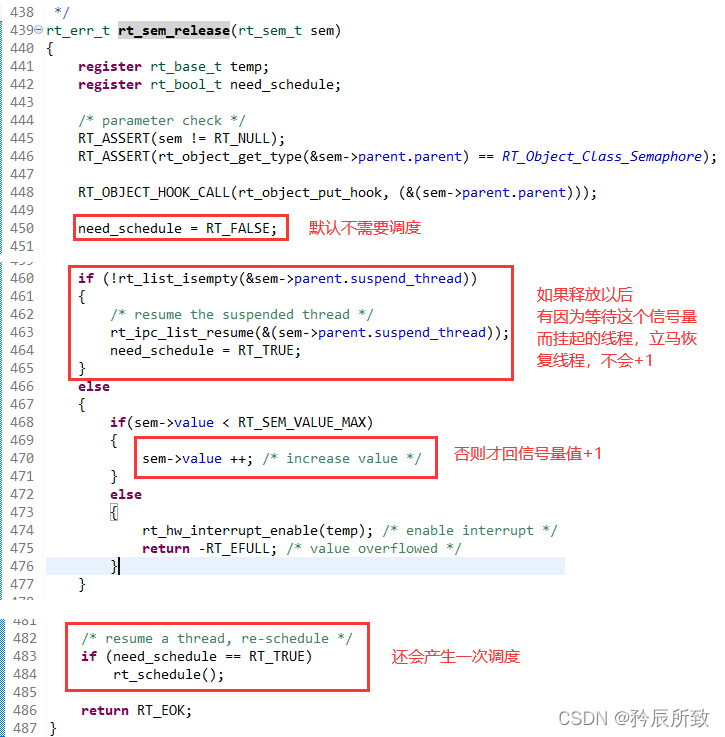
释放信号量可以使得该信号量+1,如果有线程在等待这个信号量,可以唤醒这个线程。
/**
参数:
sem 信号量对象的句柄
返回值:
RT_EOK 成功释放信号量
*/
rt_err_t rt_sem_release(rt_sem_t sem)
2.2.5 信号量控制
信号量控制函数,用来重置信号量,使得信号量恢复为设定的值:
/**
* This function can get or set some extra attributions of a semaphore object.
参数:
sem 信号量对象的句柄
cmd 信号量控制命令 ,支持命令:RT_IPC_CMD_RESET
arg 暂时不知道
返回值:
RT_EOK 成功释放信号量
*/
rt_err_t rt_sem_control(rt_sem_t sem, int cmd, void *arg)
{
rt_ubase_t level;
/* parameter check */
RT_ASSERT(sem != RT_NULL);
RT_ASSERT(rt_object_get_type(&sem->parent.parent) == RT_Object_Class_Semaphore);
if (cmd == RT_IPC_CMD_RESET)
{
rt_ubase_t value;
/* get value */
value = (rt_ubase_t)arg;
/* disable interrupt */
level = rt_hw_interrupt_disable();
/* resume all waiting thread */
rt_ipc_list_resume_all(&sem->parent.suspend_thread);
/* set new value */
sem->value = (rt_uint16_t)value;
/* enable interrupt */
rt_hw_interrupt_enable(level);
rt_schedule();
return RT_EOK;
}
return -RT_ERROR;
}
使用示例:
rt_err_t result;
rt_uint32_t value;
value = 10; /* 重置的值,即重置为10 */
result = rt_sem_control(sem, RT_IPC_CMD_RESET, (void*)value)
/* 重置为0 */
rt_sem_control(sem, RT_IPC_CMD_RESET, RT_NULL)
对sem重置后,会先把sem上挂起的所有任务进行唤醒(任务的error是-RT_ERROR),然后把sem的值会重新初始化成设定的值。
在官方论坛有如下说明:
在rt_sem_release后使用rt_sem_control的目的是因为在某些应用中必须rt_sem_take和rt_sem_release依次出现,而不允许rt_sem_release被连续多次调用,一旦出现这种情况会被认为是出现了异常,通过调用rt_sem_control接口来重新初始化 sem_ack恢复异常。
2.3 示例(典型停车场模型)
前面说到过,信号量非常灵活,可以使用的场合也很多,官方也有很多例子,我们这里做个典型的示例
— 停车场模型(前面用截图做解释,后面会附带源码)。
示例中,我们使用两个不同的按键来模拟车辆的进出,但是考虑到我们还没有学设备和驱动,没有添加按键驱动,所以我们用古老的方式来实现按键操作:
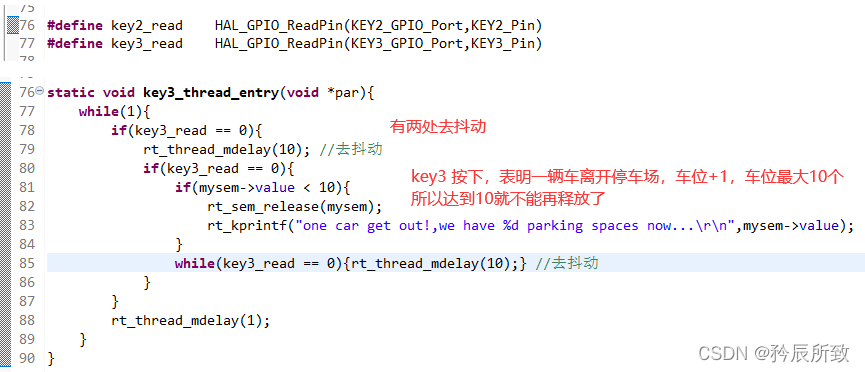
按键key3,代表车辆离开:
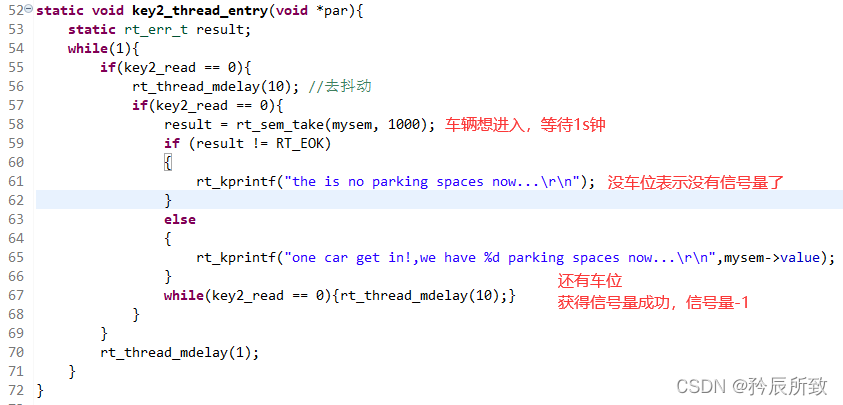
按键key2,代表车辆进入:
信号量的创建,初始10个车位:
当然不要忘了,车辆进入和车辆离开(两个按键)是需要两个线程的。
我们来看看测试效果,说明如图:
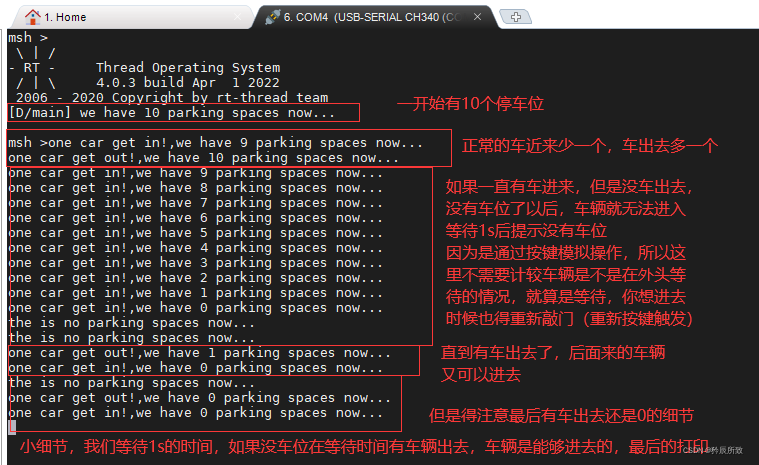
注意上图测试最后的细节,虽然 one car get out! 但是打印出来的停车位还是0,可以这么理解,key3_thread_entry线程释放了信号量以后还没来得及打印,等待信号量的线程key2_thread_entry就获取到了信号量。
具体的分析需要看rt_sem_release函数源码,里面会判断是否需要值+1,以及是否需要调度:
附上上面测试代码:
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-02-16 RT-Thread first version
*/
#include <rtthread.h>
#include "main.h"
#include "usart.h"
#include "gpio.h"
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
static struct rt_thread led1_thread; //led1线程
static char led1_thread_stack[256];
static rt_thread_t led2_thread = RT_NULL; //led2线程
static rt_thread_t key2_thread = RT_NULL; //
static rt_thread_t key3_thread = RT_NULL; //
rt_sem_t mysem;
static void led1_thread_entry(void *par){
while(1){
LED1_ON;
rt_thread_mdelay(1000);
LED1_OFF;
rt_thread_mdelay(1000);
}
}
static void led2_thread_entry(void *par){
while(1){
LED2_ON;
rt_thread_mdelay(500);
LED2_OFF;
rt_thread_mdelay(500);
}
}
static void key2_thread_entry(void *par){
static rt_err_t result;
while(1){
if(key2_read == 0){
rt_thread_mdelay(10); //去抖动
if(key2_read == 0){
result = rt_sem_take(mysem, 1000);
if (result != RT_EOK)
{
rt_kprintf("the is no parking spaces now...\r\n");
}
else
{
rt_kprintf("one car get in!,we have %d parking spaces now...\r\n",mysem->value);
}
while(key2_read == 0){rt_thread_mdelay(10);}
}
}
rt_thread_mdelay(1);
}
}
static void key3_thread_entry(void *par){
while(1){
if(key3_read == 0){
rt_thread_mdelay(10); //去抖动
if(key3_read == 0){
if(mysem->value < 10){
rt_sem_release(mysem);
rt_kprintf("one car get out!,we have %d parking spaces now...\r\n",mysem->value);
}
while(key3_read == 0){rt_thread_mdelay(10);} //去抖动
}
}
rt_thread_mdelay(1);
}
}
int main(void)
{
MX_GPIO_Init();
MX_USART1_UART_Init();
rt_err_t rst2;
rst2 = rt_thread_init(&led1_thread,
"led1_blink ",
led1_thread_entry,
RT_NULL,
&led1_thread_stack[0],
sizeof(led1_thread_stack),
RT_THREAD_PRIORITY_MAX -1,
50);
if(rst2 == RT_EOK){
rt_thread_startup(&led1_thread);
}
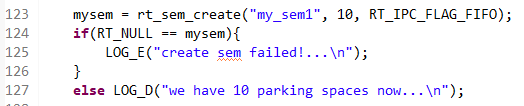
mysem = rt_sem_create("my_sem1", 10, RT_IPC_FLAG_FIFO);
if(RT_NULL == mysem){
LOG_E("create sem failed!...\n");
}
else LOG_D("we have 10 parking spaces now...\n");
key2_thread = rt_thread_create("key2_control",
key2_thread_entry,
RT_NULL,
512,
RT_THREAD_PRIORITY_MAX -2,
50);
/* 如果获得线程控制块,启动这个线程 */
if (key2_thread != RT_NULL)
rt_thread_startup(key2_thread);
key3_thread = rt_thread_create("key3_control",
key3_thread_entry,
RT_NULL,
512,
RT_THREAD_PRIORITY_MAX -2,
50);
/* 如果获得线程控制块,启动这个线程 */
if (key3_thread != RT_NULL)
rt_thread_startup(key3_thread);
return RT_EOK;
}
void led2_Blink(){
led2_thread = rt_thread_create("led2_blink",
led2_thread_entry,
RT_NULL,
256,
RT_THREAD_PRIORITY_MAX -1,
50);
/* 如果获得线程控制块,启动这个线程 */
if (led2_thread != RT_NULL)
rt_thread_startup(led2_thread);
}
MSH_CMD_EXPORT(led2_Blink, Led2 sample);
三、互斥量
互斥量是一种特殊的二值信号量。互斥量的状态只有两种,开锁或闭锁(两种状态值)。
互斥量支持递归,持有该互斥量的线程也能够再次获得这个锁而不被挂起。自己能够再次获得互斥量。
互斥量可以解决优先级翻转问题,它能够实现优先级继承。
互斥量互斥量不能在中断服务例程中使用。
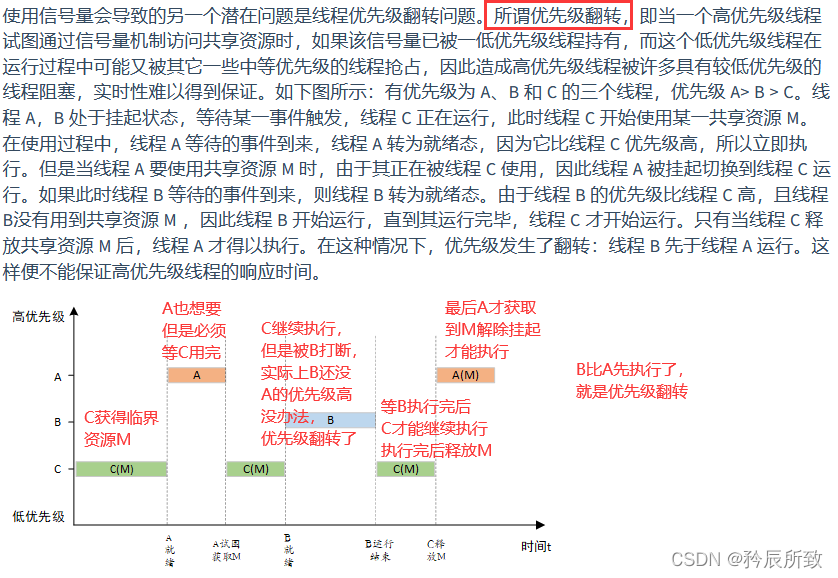
3.1 优先级翻转
优先级翻转,我在以前 FreeRTOS 专栏写过:

再用官方的图加深理解:
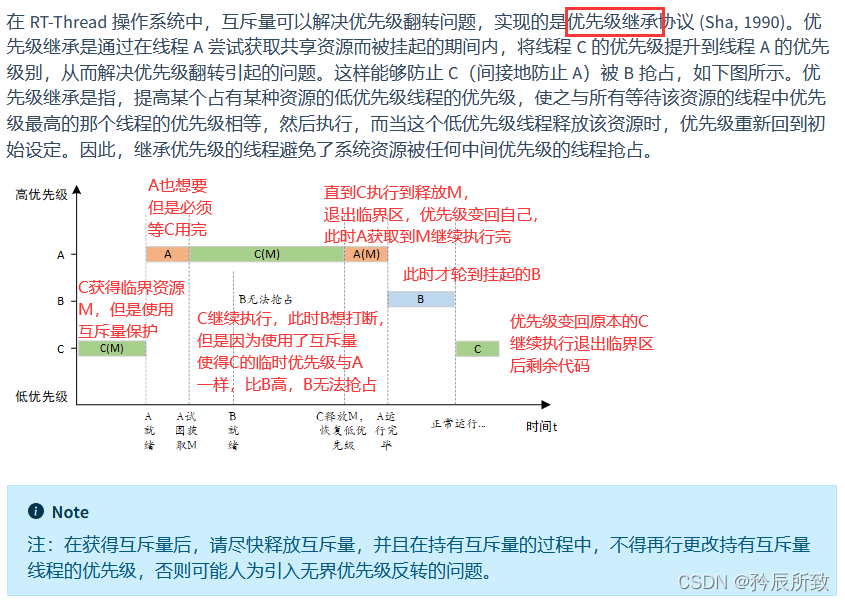
3.2 优先级继承
优先级继承,我在以前 FreeRTOS 专栏也写过:
再用官方的图加深理解:
需要切记的是互斥量不能在中断服务例程中使用。
3.3 互斥量控制块
#ifdef RT_USING_MUTEX
/**
* Mutual exclusion (mutex) structure
* parent 继承ipc类
* value 互斥量的值
* original_priority 持有线程的原始优先级
* hold 持有线程的持有次数,可以多次获得
* *owner 当前拥有互斥量的线程
*/
struct rt_mutex
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
rt_uint16_t value; /**< value of mutex */
rt_uint8_t original_priority; /**< priority of last thread hold the mutex */
rt_uint8_t hold; /**< numbers of thread hold the mutex */
struct rt_thread *owner; /**< current owner of mutex */
};
/* rt_mutext_t 为指向互斥量结构体的指针类型 */
typedef struct rt_mutex *rt_mutex_t;
#endif
3.4 互斥量操作
3.4.1 创建和删除
先定义一个指向互斥量结构体的指针变量,接收创建好的句柄。
创建互斥量:
/**
参数的含义:
1、name 互斥量名称
2、flag 该标志已经作废,无论用户选择 RT_IPC_FLAG_PRIO 还是 RT_IPC_FLAG_FIFO,
内核均按照 RT_IPC_FLAG_PRIO 处理
返回值:
互斥量创建成功,返回互斥量的控制块指针
互斥量创建失败,返回RT_BULL
*/
rt_mutex_t rt_mutex_create(const char *name, rt_uint8_t flag)
删除互斥量:
/**
参数:
mutex 互斥量对象的句柄
返回值:
RT_EOK 删除成
*/
rt_err_t rt_mutex_delete(rt_mutex_t mutex)
3.4.2 初始化和脱离
静态的方式,先定义一个互斥量结构体,然后对他进行初始化。
初始化互斥量:
/**
参数的含义:
1、mutex 互斥量对象的句柄,指向互斥量对象的内存块,开始定义的结构体
2、name 互斥量名称
3、flag 该标志已经作废,按照 RT_IPC_FLAG_PRIO (优先级)处理
返回值:
RT_EOK 初始化成功
*/
rt_err_t rt_mutex_init(rt_mutex_t mutex, const char *name, rt_uint8_t flag)
脱离互斥量:
/**
参数:
mutex 互斥量对象的句柄
返回值:
RT_EOK 成功
*/
rt_err_t rt_mutex_detach(rt_mutex_t mutex)
3.4.3 获取互斥量
一个时刻一个互斥量只能被一个线程持有。
如果互斥量没有被其他线程控制,那么申请该互斥量的线程将成功获得该互斥量。如果互斥量已经被当前线程线程控制,则该互斥量的持有计数加 1,当前线程也不会挂起等待。
/**
参数:
1、mutex 互斥量对象的句柄
2、time 指定的等待时间,单位是操作系统时钟节拍(OS Tick)
返回值:
RT_EOK 成功获得互斥量
-RT_ETIMEOUT 超时依然未获得互斥量
-RT_ERROR 获取失败
*/
rt_err_t rt_mutex_take(rt_mutex_t mutex, rt_int32_t time)
3.4.4 释放互斥量
在获得互斥量后,应该尽可能的快释放互斥量。
/**
参数:
mutex 互斥量对象的句
返回值:
RT_EOK 成功
*/
rt_err_t rt_mutex_release(rt_mutex_t mutex)
3.5 示例(优先级继承)
互斥量做一个简单的示例,但是即便简单,也能体现出优先级继承这个机制。
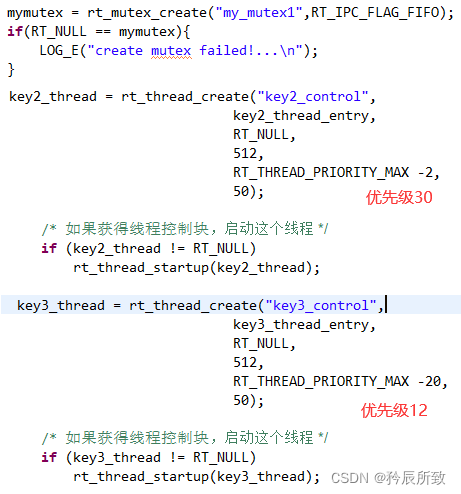
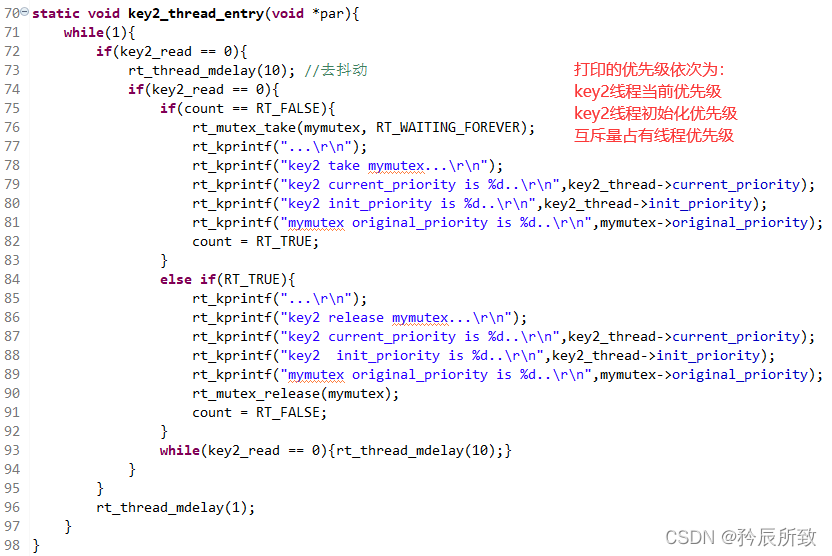
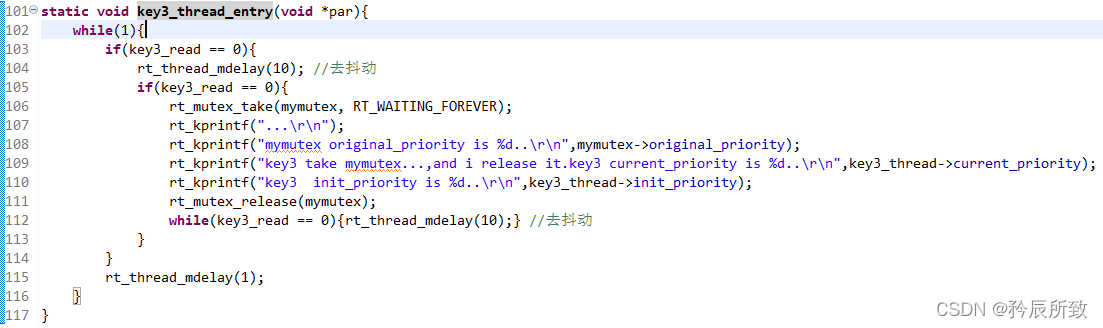
示例中,我们使用两个按键,key2按键,按一次获取互斥量,再按一次释放互斥量,打印自己初始优先级,当前优先级,互斥量占有线程优先级这几个量。key3按键,按一次,获取互斥量,立马就释放,也打印几个优先级。
互斥量的创建,和两个线程的优先级:
key2操作:
key3操作:
测试结果说明图:
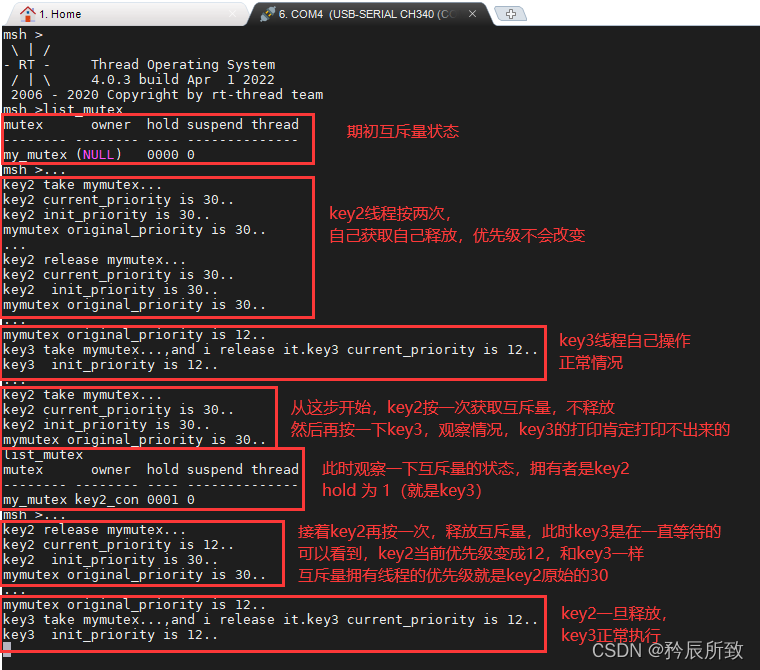
示例中为了更好的演示并没有快进快出,实际使用还是需要快进快出,除非你自己就是有这种特出需求。
还有一个细节,就是 RT-Thread 中对象的 名字,只能显示8个字符长度,长了会截断,并不影响使用。
四、事件集
事件集这部分与 FreeRTOS 基本一样。
事件集主要用于线程间的同步,它的特点是可以实现一对多,多对多的同步。即一个线程与多个事件的关系可设置为:其中任意一个事件唤醒线程,或几个事件都到达后才唤醒线程进行后续的处理;同样,事件也可以是多个线程同步多个事件。
RT-Thread 定义的事件集有以下特点:
- 事件只与线程相关,事件间相互独立:每个线程可拥有 32 个事件标志,采用一个 32 bit 无符号整型数进行记录,每一个 bit 代表一个事件;
- 事件仅用于同步,不提供数据传输功能;
- 事件无排队性,即多次向线程发送同一事件 (如果线程还未来得及读走),其效果等同于只发送一次。
4.1 事件集控制块
#ifdef RT_USING_EVENT
/**
* flag defintions in event
* 逻辑与
* 逻辑或
* 清除标志位
*/
#define RT_EVENT_FLAG_AND 0x01 /**< logic and */
#define RT_EVENT_FLAG_OR 0x02 /**< logic or */
#define RT_EVENT_FLAG_CLEAR 0x04 /**< clear flag */
/*
* event structure
* set:事件集合,每一 bit 表示 1 个事件,bit 位的值可以标记某事件是否发生
*/
struct rt_event
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
rt_uint32_t set; /**< event set */
};
/* rt_event_t 是指向事件结构体的指针类型 */
typedef struct rt_event *rt_event_t;
#endif
4.2 事件集操作
4.2.1 创建和删除
先定义一个指向事件集结构体的指针变量,接收创建好的句柄。
创建事件集:
/**
参数的含义:
1、name 事件集的名称
2、flag 事件集的标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO理
返回值:
事件集创建成功,返回事件集的控制块指针
事件集创建失败,返回RT_BULL
*/
rt_event_t rt_event_create(const char *name, rt_uint8_t flag)
flag 使用哪一个,解释和信号量一样,可参考信号量创建部分说明。
删除事件集:
/**
参数:
event 事件集对象的句柄
返回值:
RT_EOK 成功
*/
rt_err_t rt_event_delete(rt_event_t event)
4.2.2 初始化和脱离
静态的方式,先定义一个事件集结构体,然后对他进行初始化。
初始化事件集:
/**
参数的含义:
1、event 事件集对象的句柄
2、name 事件集的名称
3、flag 事件集的标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO
返回值:
RT_EOK 初始化成功
*/
rt_err_t rt_event_init(rt_event_t event, const char *name, rt_uint8_t flag)
脱离事件集:
/**
参数:
event 事件集对象的句柄
返回值:
RT_EOK 成功
*/
rt_err_t rt_event_detach(rt_event_t event)
4.2.3 发送事件
发送事件函数可以发送事件集中的一个或多个事件。
/**
参数的含义:
1、event 事件集对象的句柄
2、set 发送的一个或多个事件的标志值
返回值:
RT_EOK 成功
*/
rt_err_t rt_event_send(rt_event_t event, rt_uint32_t set)
4.2.4 接收事件
内核使用 32 位的无符号整数来标识事件集,它的每一位代表一个事件,因此一个事件集对象可同时等待接收 32 个事件,内核可以通过指定选择参数 “逻辑与” 或“逻辑或”来选择如何激活线程。
/**
参数的含义:
1、event 事件集对象的句柄
2、set 接收线程感的事件
3、option 接收选项,可取的值为
#define RT_EVENT_FLAG_AND 0x01 逻辑与
#define RT_EVENT_FLAG_OR 0x02 逻辑或
#define RT_EVENT_FLAG_CLEAR 0x04 选择清除重置事件标志位
4、timeout 指定超时时间
5、recved 指向接收到的事件,如果不在意,可以使用 NULL
返回值:
RT_EOK 成功
-RT_ETIMEOUT 超时
-RT_ERROR 错误
*/
rt_err_t rt_event_recv(rt_event_t event,
rt_uint32_t set,
rt_uint8_t option,
rt_int32_t timeout,
rt_uint32_t *recved)
4.3 示例(逻辑与和逻辑或)
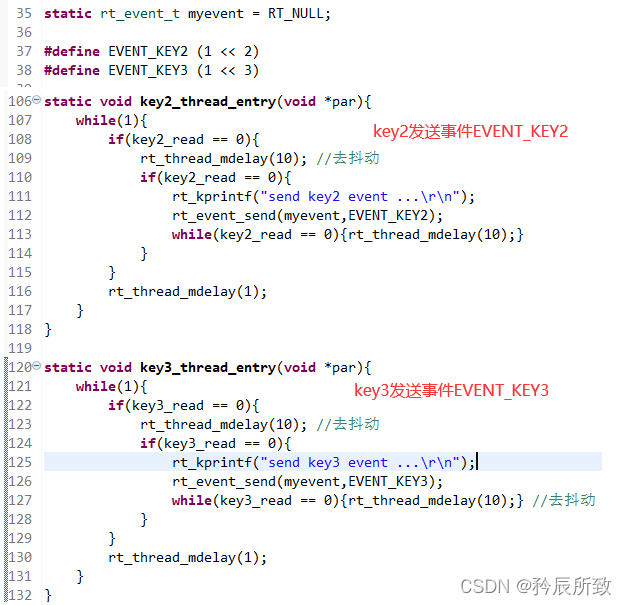
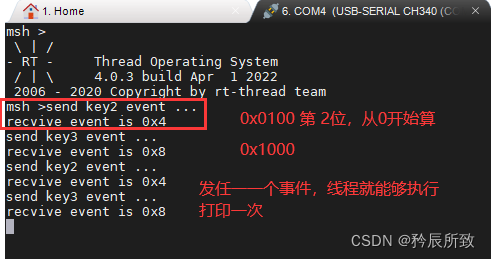
事件集通过示例可以很好的理解怎么使用,我们示例中,用按钮发送事件,其他线程接收事件,进行对应的处理。
按键操作:
线程逻辑或处理:
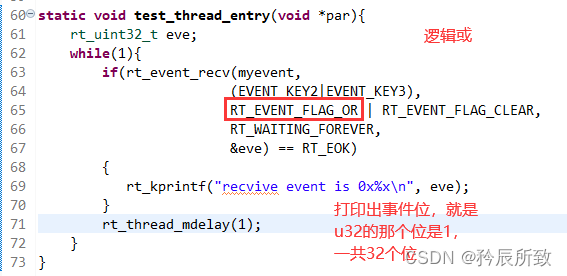
逻辑或测试结果:
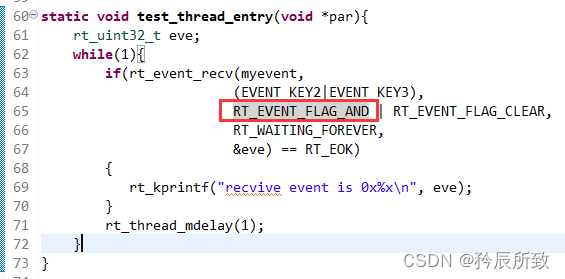
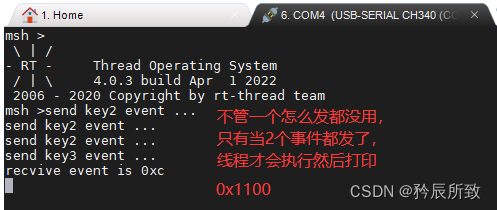
线程逻辑与处理:
逻辑与测试结果:
结语
前面说过,RT-Thread 的这些机制与 FreeRTOS 大体上类似,如果对 FreeRTOS 这部分感兴趣的,可以看一下 FreeRTOS 这部分的博文:
FreeRTOS记录(七、FreeRTOS信号量、事件标志组、邮箱和消息队列、任务通知的关系)
本文虽然只是介绍了信号量、互斥量和事件集这几个比较简单的线程同步操作,但是最终完成了后发现内容还是很多的。
洋洋洒洒这么多字,最终看下来自己还是挺满意的,希望我把该表述的都表达清楚了,希望大家多多提意见,让博主能给大家带来更好的文章。
那么下一篇的 RT-Thread 记录,就要来说说与线程通讯 有关的 邮箱、消息队列和信号内容了。
谢谢!

- 点赞
- 收藏
- 关注作者
评论(0)