【图像边缘检测】基于matlab自适应阈值的八方向和四方向sobel图像边缘检测【含Matlab源码 2058期】

一、八方向Sobel算子的边缘检测算法简介
1 引言
随着数字图像的广泛应用, 对图像精度的要求也逐步提高。边缘是目标图像与背景图像的分界, 是图像最基本的特征之一。图像边缘蕴含了图像丰富的内在信息 (如方向、阶跃性质与形状等) , 因此边缘提取是图像分析和识别领域中一个十分重要的课题。边缘检测作为一个预处理过程, 广泛应用于图像分割、模式识别和运动分析等领域。在灰度图像中, 边缘表现为图像局部的灰度不连续性, 边缘点对应于一阶微分极大值点或二阶导数的零交叉点。传统的边缘检测方法有Roberts、Sobel、Prewitt、Laplacian、Marr、Wallis、形态学算子及小波变换等。这些算子主要是应用空域卷积算法, 通过模板与图像的卷积来提取边缘。空域卷积算法具有较强的普适性和计算速度快等优势, 因此得到了广泛的应用。但传统的边缘检测算法对图像边缘的方向特征考虑较少, 常丢失部分边缘细节。本文以Sobel算子为模型, 提出了一种多方向的边缘检测算法, 该算法采用0°、22.5°、45°、67.5°、90°、112.5°、135°、157.5°8个方向的模板进行检测, 使得检测出的图像边缘较为完整, 连续性较好。
2 边缘检测算法
2.1 Sobel算子基本原理
假设连续图像函数为f (x, y) , 函数在 (x, y) 处的梯度是一个具有方向和大小的矢量[8], 即:
式中, i、j分别为x、y方向的单位矢量。基于梯度的算子都建立在这一基础之上。梯度算子的幅值和方向分别为:
由式 (2) 计算出的grad[f (x, y) ]值即为图像在 (x, y) 处的边缘数据。上式是针对连续图像函数给出的定义, 而在实际应用中采集的图像是以像素为单位的离散数据, 因此在数字图像处理中常用相邻或间隔像素差分值来表征图像的边缘信息。
Sobel算子是利用水平方向和竖直方向模板 (如图1 (a) 、 © ) 与对应的图像数据进行卷积, 来对离散的数据进行加权计算。这两个方向模板分别用于水平方向的边缘检测和竖直方向的边缘检测。

图1 扩展的Sobel算子卷积模板
Sobel边缘检测算子对像素灰度值做了加权平均, 提供了较为连续的边缘方向信息。在技术上, Sobel算子是一种利用离散性差分算子计算图像亮度梯度的近似值。在图像的任何一点使用此算子, 将会产生对应的梯度矢量。不足之处是, Sobel算子只考虑了水平和垂直两个方向。文献[1]将Sobel算子扩展到0°、45°、90°、135°4个方向的模板 (如图1所示) , 使边缘检测效果得到明显改善, 但仍会漏检图像的一些细节。本文提出了一种八方向的边缘检测算法。通过仿真验证, 本文算法检测出的图像边缘较为完整, 轮廓线清晰且连续性较好。
2.2 基于八方向Sobel算子的边缘检测模板
本文算法采用大小为5×5的八方向模板。8个方向分别为0°、22.5°、45°、67.5°、90°、112.5°、135°和157.5° (见图2) 。

图2 本文算法卷积模板
在图2给出的模板中, 不同位置的权值w (m, n) 基于下面给出的式 (4) -式 (6) 计算得到:
式中, d (m, n) 为坐标为 (m, n) 的模板元素到坐标为 (i, j) 的模板中心的欧氏距离, u为调整系数 (与模板大小有关, 本文取u=3) , g (m, n) 为 (m, n) 处的实数权值。为简化计算, 对g (m, n) 上取整作为模板中的元素。式 (6) 中“[]”代表上取整运算。
图3描述了基于式 (5) 的、模板像素到中心像素的距离与权值关系。图中横坐标为模板像素到中心像素的距离, 纵坐标是对应的权值。由图可知, 模板像素到中心像素的距离越小, 权值越大;反之, 模板像素到中心像素的距离越大, 权值越小。
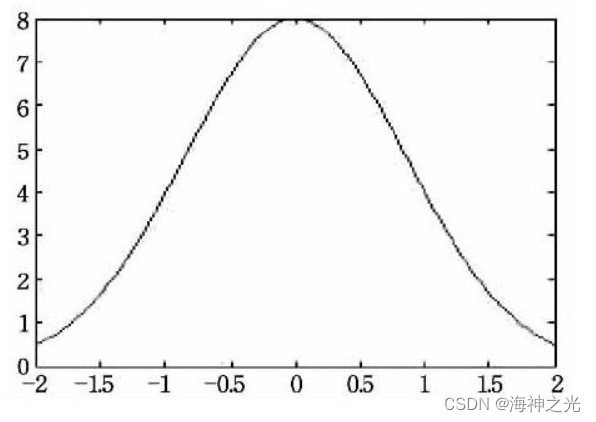
图3 权值与距离关系示意图
该算法分别利用八方向模板与对应的图像数据进行卷积做近似计算。算法取8个缓存中灰度值较大者作为当前像素输出值。
2.3 算法实现
设矩阵[f (i, j) ]表示待检测的图像 (其中 (i, j) 表示各像素点的坐标) , f (i, j) 表示图像在 (i, j) 处的灰度值, w[f (i, j) ]表示以点 (i, j) 为中心的5×5窗口, g (i, j) 为经过边缘检测后的图像在点 (i, j) 的灰度输出。
算法实现步骤:
设mk (k=1, 2, …, 8) 为图2给出的8个5×5模板, n为具有8个元素的整型数组。对图像中的每一个像素 (坐标为 (i, j) ) 进行如下处理:
Step 1对待处理像素 (i, j) , 利用模板mk (k=1, 2, …, 8) 与w[f (i, j) ]进行卷积, 并将卷积结果的绝对值存入数组元素n[k] (k=1, 2, …, 8) 中;
Step 2查找由Step 1中得到的数组n中所有元素的最大值:
2.1初始化max=n[0], k=1;
2.2若n[k]>max, 则令max=n[k];
2.3若k<8, 则k=k+1, 转2.2;否则转Step 3;
Step 3将max赋给g (i, j) , 作为该像素点的输出值。
二、部分源代码
I2=imread(‘ant.jpg’); %原始图
I = rgb2gray(I2);
[m,n] = size(I); %图的大小
I=double(I);
%加噪声
% std_n=5; % 高斯噪声标准差
% In = randn(size(I))*std_n; % 高斯随机噪声
% IO = I + In; % IO为含噪声图像
IO = I;
IO_eage=sobel4_grad(IO);
figure(1);
imshow(IO_eage);title(‘4方向边缘’)
imwrite(IO_eage,‘edge4.bmp’);
IO_eage=sobel8_grad(IO);
figure(2);
imshow(IO_eage);title(‘8方向边缘’)
imwrite(IO_eage,‘edge8.bmp’);
IO_eage=edge(IO,‘sobel’);
figure(3);
imshow(IO_eage);title(‘sobel边缘’)
imwrite(IO_eage,‘edge0.bmp’);
三、运行结果



四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]刘源,夏春蕾.一种基于Sobel算子的带钢表面缺陷图像边缘检测算法[J].电子测量技术. 2021,44(03)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/126533296

- 点赞
- 收藏
- 关注作者
评论(0)