美国生物多样性重要性数据集

【摘要】 概述生物多样性重要性地图(MoBI) 由栅格地图组成,该地图结合了美国本土 2,216 种濒危物种的栖息地信息,使用基于范围大小和保护程度的权重来确定对生物多样性保护具有高度重要性的区域。该项目包括的物种是截至 2018 年 9 月,全球保护状态为 G1(濒危)或 G2(濒危)或根据美国濒危物种法在全物种层面被列为受威胁或濒危的物种. 该项目包括的分类群包括脊椎动物(鸟类、哺乳动物、两栖动物...
项目级资产
数据集项目包含以下资产。
标题
STAC 密钥
角色
类型
所有物种的范围大小的稀有度
RSR_All
数据
GeoTIFF (COG)
维管植物范围大小的稀有度
RSR_Plants
数据
GeoTIFF (COG)
脊椎动物的范围大小的稀有度
RSR_Vertebrates
数据
GeoTIFF (COG)
水生无脊椎动物的范围大小的稀有度
RSR_AquaticInverts
数据
GeoTIFF (COG)
所有物种的保护加权范围大小稀有度
PWRSR_GAP12_SUM_All
数据
GeoTIFF (COG)
所有物种的物种丰富度
SpeciesRichness_All
数据
GeoTIFF (COG)
传粉者的范围大小稀有度
RSR_PollinatorInverts
数据
GeoTIFF (COG)
维管植物的保护加权范围大小稀有度
PWRSR_GAP12_SUM_Plants
数据
GeoTIFF (COG)
维管植物的物种丰富度
SpeciesRichness_Plants
数据
GeoTIFF (COG)
脊椎动物的保护加权范围大小稀有度
PWRSR_GAP12_SUM_Vertebrates
数据
GeoTIFF (COG)
脊椎动物的物种丰富度
SpeciesRichness_Vertebrates
数据
GeoTIFF (COG)
水生无脊椎动物的保护加权范围大小稀有度
PWRSR_GAP12_SUM_AquaticInverts
数据
GeoTIFF (COG)
水生无脊椎动物的物种丰富度
SpeciesRichness_AquaticInverts
数据
GeoTIFF (COG)
传粉媒介的保护加权范围大小稀有度
PWRSR_GAP12_SUM_PollinatorInverts
数据
GeoTIFF (COG)
传粉媒介的物种丰富度
SpeciesRichness_PollinatorInverts
数据
GeoTIFF (COG)
数据集资产
资产
STAC 密钥
描述
角色
内容类型
abfs://items/mobi.parquet
geoparquet-items
导出为 GeoParquet 格式的集合的 STAC 项目的快照。
静态项目
应用程序/x-镶木地板

使用 Planetary Computer STAC API 访问 MoBI 数据
生物多样性重要性地图 (MoBI) 由一系列栅格地图组成,这些地图结合了美国本土 2,216 种濒危物种的栖息地信息,使用基于范围大小和保护程度的权重来确定对生物多样性保护具有高度重要性的区域。
此笔记本提供了使用 Planetary Computer API 从 Azure 上的 blob 存储访问 MoBI 数据的示例。
中提供了此数据集的完整文档。
环境设置
此笔记本可使用或不使用 API 密钥,但您将获得使用 API 密钥访问数据的更多权限。Planetary Computer Hub 已预先配置为使用您的 API 密钥。
from pystac_client import Client
import matplotlib.pyplot as plt
import numpy as np
import planetary_computer as pc
import rasterio查询数据集
让我们查询行星计算机以获取mobi集合中的所有项目。
catalog = Client.open("https://planetarycomputer.microsoft.com/api/stac/v1")
mobi = catalog.search(collections=["mobi"])
items = [item for item in mobi.get_items()]
print(f"Returned {len(items)} Items")已退回 1 件商品
你会看到我们只为整个集合返回了一个项目。这与行星计算机上的其他类型的数据集有点不同。在这种情况下,MoBI 栅格的分辨率相当低,因此无需平铺成单独的栅格。它们也以单一时间分辨率存在,因此单个项目中的每个栅格都可以转换整个 CONUS。
让我们看看与此项目相关联的资产:
item = items[0]
print(*[f"{key}: {asset.description}" for key, asset in item.assets.items()], sep="\n")RSR_All:物种范围大小的稀有度
RSR_Plants:维管植物范围大小的稀有度
RSR_Vertebrates:脊椎动物的范围大小稀有度
RSR_AquaticInverts:水生无脊椎动物的范围大小稀有度
PWRSR_GAP12_SUM_All:所有物种的保护加权范围大小稀有度
SpeciesRichness_All:物种的物种丰富度
RSR_PollinatorInverts:传粉者的范围大小稀有度
PWRSR_GAP12_SUM_Plants:维管植物的保护加权范围大小稀有度
SpeciesRichness_Plants:维管植物的物种丰富度
PWRSR_GAP12_SUM_Vertebrates:脊椎动物的保护加权范围大小稀有度
SpeciesRichness_Vertebrates:脊椎动物的物种丰富度
PWRSR_GAP12_SUM_AquaticInverts:水生无脊椎动物的保护加权范围大小稀有度
SpeciesRichness_AquaticInverts:水生无脊椎动物的物种丰富度
PWRSR_GAP12_SUM_PollinatorInverts:传粉者的保护加权范围大小稀有度
SpeciesRichness_PollinatorInverts:传粉者的物种丰富度
读取并绘制图层
我们有 15 个资产,每个资产对应一个不同的栅格。我们将SpeciesRichness_Vertebrates通过直接从 blob 存储中将整个文件读入内存来选择资产并绘制它。
signed_item = pc.sign(item)
vertebreates_richness = signed_item.assets["SpeciesRichness_Vertebrates"]
with rasterio.open(vertebreates_richness.href) as raster:
data_array = raster.read(1).astype(float)
raster.close()
# Set nodata values to be transparent
nd_val = raster.nodatavals[0]
data_array[data_array == nd_val] = np.nan
# Plot
fig = plt.figure(figsize=(12, 6), dpi=150, frameon=False)
plt.axis("off")
plt.imshow(data_array, cmap="terrain");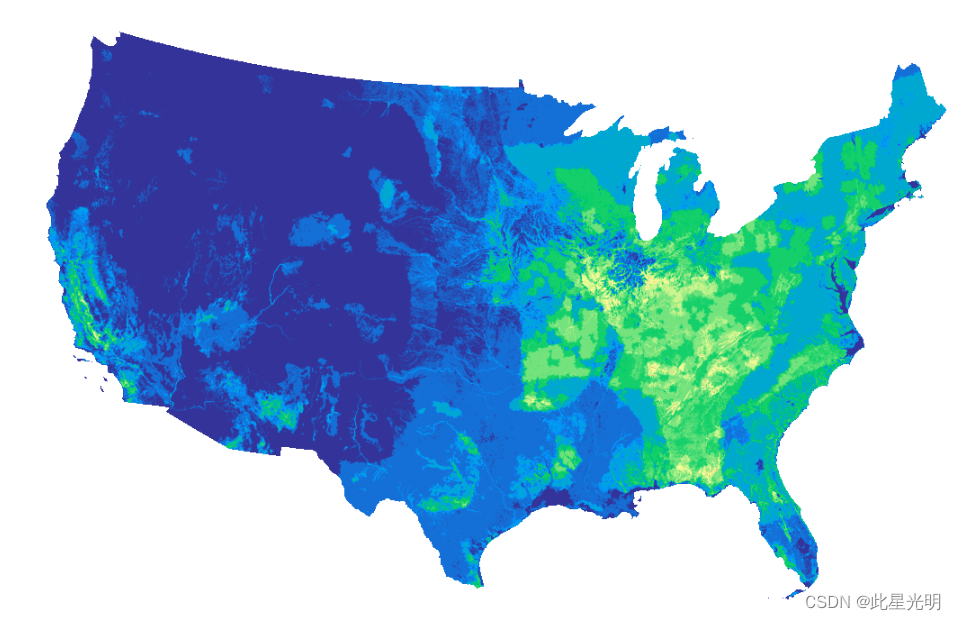
![]()

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)