RK3399平台开发系列讲解(内核驱动外设篇)6.35、IAM20680陀螺仪介绍

【摘要】
🚀返回专栏总目录
沉淀、分享、成长,让自己和他人都能有所收获!😄
📢介绍IAM20680陀螺仪相关的必备基础知识。
一、陀螺仪的基本信息
我们可以知道,IMA20680是...

沉淀、分享、成长,让自己和他人都能有所收获!😄
📢介绍IAM20680陀螺仪相关的必备基础知识。
一、陀螺仪的基本信息
我们可以知道,IMA20680是一个六轴传感器,不仅仅只集成了陀螺仪(GYRO),也将重力传感器(Accel)集成在里面,传输方式分为两种,一种是SPI实现,另一种主要是通过I2C来进行实现的。我们主要是通过挂载在I2C总线上来实现的,具体挂载在那个总线上,要和硬件确认。
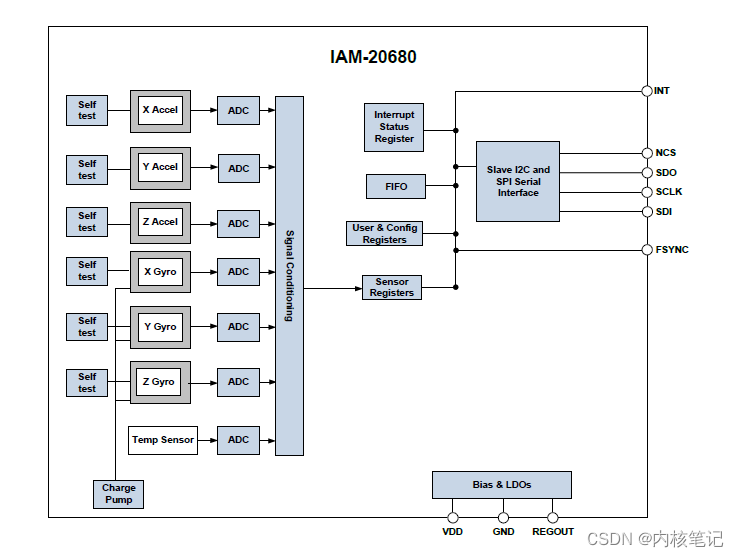
IAM陀螺仪基本配置:
由于我们所挂载的总线是I2C,所以要知道,芯片所对应的i2c地址是:0x68或0x69取决于
文章来源: xuesong.blog.csdn.net,作者:内核笔记,版权归原作者所有,如需转载,请联系作者。
原文链接:xuesong.blog.csdn.net/article/details/126257503

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)