图像增强和滤波图像滤波

图像滤波原理
高斯滤波
二维情况下的高斯滤波分布
1 2 π σ x σ y exp − ( x − u ) 2 + ( y − v ) 2 2 σ x σ y \frac{1}{2\pi \sigma_x \sigma_y} \exp { -\frac{(x-u)^2 + (y-v)^2}{2\sigma_x \sigma_y} } 2πσxσy1exp−2σxσy(x−u)2+(y−v)2
不过一般情况下都是让 x x x方向和 y y y方向的方差相等
1 2 π σ 2 exp − ( x − u ) 2 + ( y − v ) 2 2 σ 2 \frac{1}{2\pi \sigma^2} \exp { -\frac{(x-u)^2 + (y-v)^2}{2\sigma^2} } 2πσ21exp−2σ2(x−u)2+(y−v)2
先看原图
plt.imshow(img_d1)

这个颜色是因为opencv的默认格式为BGR
在opencv里调用API如下
# 这里设置方差都为0.8,你也可以让两个方向的方差不等
plt.imshow(cv.GaussianBlur(img_d1_copy, (5,5), 0.8))
原理代码
# Gaussian filter
def gaussian_filter_zp(img, K_size=5, sigma=0.8):
if len(img.shape) == 3:
H, W, C = img.shape
else:
img = np.expand_dims(img, axis=-1)
H, W, C = img.shape
## Zero padding
pad = K_size // 2
print(pad)
out = np.zeros((H + pad * 2, W + pad * 2, C), dtype=np.float)
out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float)
## prepare Kernel
K = np.zeros((K_size, K_size), dtype=np.float)
for x in range(-pad, -pad + K_size):
for y in range(-pad, -pad + K_size):
K[x + pad, y + pad] = np.exp( -(x ** 2 + y ** 2) / (2 * (sigma ** 2)))
K /= (sigma * 2 * np.pi)
K /= K.sum()
print(K)
tmp = out.copy()
# filtering
for y in range(H):
for x in range(W):
for c in range(C):
out[pad + y, pad + x, c] = np.sum(K * tmp[y: y + K_size, x: x + K_size, c])
out = out[pad: pad + H, pad: pad + W].astype(np.uint8)
return out
上诉代码分两部分,第一部分是根据给定的K_size和方差计算内核
K_size=5, sigma=0.8情况下的内核为
[[0.00048091 0.00501119 0.01094545 0.00501119 0.00048091]
[0.00501119 0.0522178 0.11405416 0.0522178 0.00501119]
[0.01094545 0.11405416 0.2491172 0.11405416 0.01094545]
[0.00501119 0.0522178 0.11405416 0.0522178 0.00501119]
[0.00048091 0.00501119 0.01094545 0.00501119 0.00048091]]
第二部分是一个卷积的操作,应该叫相关,相关操作之前先把图像翻转 18 0 o 180^o 180o就是卷积了
如果你嫌麻烦,opencv有卷积的API
# 这个K就是上面计算出来的高斯核
Gaussian_k = K.copy()
plt.imshow(cv.filter2D(img_d1_copy, -1, Gaussian_k))
执行代码
plt.subplot(131),plt.imshow(img_d1_copy),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(132),plt.imshow(cv.GaussianBlur(img_d1_copy, (3,3), 1, 1)),plt.title('Gaussian_opencv')
plt.xticks([]), plt.yticks([])
plt.subplot(133), plt.imshow(gaussian_filter_zp(img_d1_copy)),plt.title('gaussian_filter_zp')
plt.xticks([]), plt.yticks([])

中值滤波
中值滤波和均值滤波都很简单
原理
在图像上给出一个核的大小,计算一个核内的全部像素值,然后把核中心的像素替换为整个核内像素的中值。
在均值滤波和高斯滤波中,计算出来新的像素值可能不属于原始图像,但是中值滤波使用的就是原始图像的像素作为新的像素值。中值滤波可以很好的去除椒盐噪声。
Opencv_API
plt.imshow(cv.medianBlur(img_d1_copy, 5))
Code
def median_filter_zp(img :np.ndarray, K_size=5):
H,W,C = img.shape
pad = K_size // 2
out = np.zeros((H+pad*2, W+pad*2, C), dtype=np.float)
out[pad:pad+H, pad:pad+W] = img.copy().astype(np.float)
tmp = out.copy()
# filter
for y in range(H):
for x in range(W):
for c in range(C):
out[pad+y, pad+x, c] = np.median(tmp[y:y+K_size, x:x+K_size, c])
out = out[pad:pad+H, pad:pad+W].astype(np.uint8)
return out
执行
plt.subplot(131),plt.imshow(img_d1_copy),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(132),plt.imshow(cv.medianBlur(img_d1_copy, 5)),plt.title('Median_opencv')
plt.xticks([]), plt.yticks([])
plt.subplot(133), plt.imshow(median_filter_zp(img_d1_copy)),plt.title('median_filter_zp')
plt.xticks([]), plt.yticks([])

Sobel滤波
sobel滤波器是一种高通滤波器,它能放大图像中的高频成分(边缘),同样的还有Perwitt、Scharr等内核。这些定向滤波器都会计算图像函数的一阶导数。因此在滤波器方向上像素强度变化大的区域将会得到较大的值,计算图像导数的滤波器称为高通滤波器
g r a d ( I ) = [ ∂ I ∂ x , ∂ I ∂ y ] T grad(I) = [\frac{\partial I}{\partial x}, \frac{\partial I}{\partial y}]^T grad(I)=[∂x∂I,∂y∂I]T
Sobel Kernel
# vertical
array([[-1., -2., -1.],
[ 0., 0., 0.],
[ 1., 2., 1.]])
# horizontal
array([[-1., 0., 1.],
[-2., 0., 2.],
[-1., 0., 1.]])
执行步骤和上述代码一样
def different_filter_zp(img: np.ndarray, K_size=3):
H,W,C = img.shape
# zero padding
pad = K_size // 2
out = np.zeros((H+pad*2, W+pad*2, C), dtype=np.float)
out[pad:pad+H, pad:pad+W] = img.copy().astype(np.float)
tmp = out.copy()
out_v = out.copy()
out_h = out.copy()
# vertical kernel
Kv = np.array([[-1., -2., -1.],[0., 0., 0.],[1., 2., 1.]])
# Horizontal kernel
Kh = np.array([[-1., 0., 1.],[-2., 0., 2.], [-1., 0., 1.]])
print(K_size)
# filter
for y in range(H):
for x in range(W):
for c in range(C):
out_v[y+pad, x+pad, c] = np.sum(Kv * tmp[y:y+K_size, x:x+K_size, c])
out_h[y+pad, x+pad, c] = np.sum(Kh * tmp[y:y+K_size, x:x+K_size, c])
out_v = np.clip(out_v, 0, 255)
out_h = np.clip(out_h, 0, 255)
out_v = out_v[pad:pad+H, pad:pad+W].astype(np.uint8)
out_h = out_h[pad:pad+H, pad:pad+W].astype(np.uint8)
return out_v, out_h
打印结果
# 执行
different_filter_zp_v, different_filter_zp_h = different_filter_zp(img_d1_RGB)
# print
plt.subplot(1,2,1)
plt.imshow(different_filter_zp_v),plt.title('v')
plt.xticks([]), plt.yticks([])
plt.subplot(1,2,2)
plt.imshow(different_filter_zp_h),plt.title('h')
plt.xticks([]), plt.yticks([])

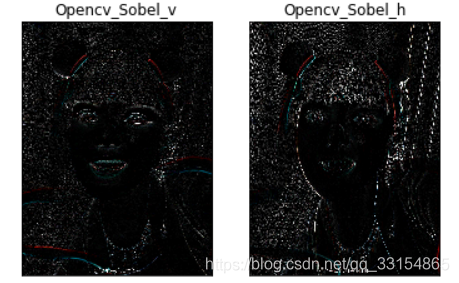
对比调用opencvAPI
plt.subplot(1,2,1)
plt.imshow(cv.Sobel(img_d1_RGB,-1, 0,1)), plt.title('Opencv_Sobel_v')
plt.xticks([]),plt.yticks([])
plt.subplot(1,2,2)
plt.imshow(cv.Sobel(img_d1_RGB,-1, 1,0)), plt.title('Opencv_Sobel_h')
plt.xticks([]),plt.yticks([])
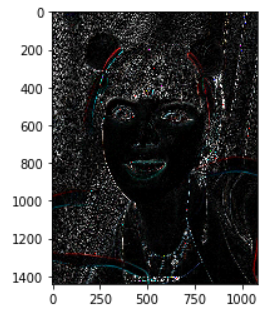
note
相同时求得水平和竖直方向的梯度,建议使用L1范数
plt.imshow(abs(different_filter_zp_v) + abs(different_filter_zp_h))
拉普拉斯(计算二阶导)
l a p l a c i a n ( I ) = ( ∂ I ∂ x ) 2 , ( ∂ I ∂ y ) 2 laplacian(I) =\sqrt{({ \frac{\partial I}{\partial x}})^2, ({\frac{\partial I}{\partial y}})^2} laplacian(I)=(∂x∂I)2,(∂y∂I)2
与Sobel相比,拉普拉斯算子在计算时可以使用更大的内核,并且对噪声更加敏感,(因为这些更大的内核是用高斯函数的二阶导数计算的),这些算子也称为**高斯-拉普拉斯算子(Laplacian of Gaussion, LOG)**拉普拉斯算子内核的值的累加和总是0.这保证在强度值恒定的区域中,拉普拉斯算子将变为0。

- 点赞
- 收藏
- 关注作者
评论(0)