【强化学习】悬崖寻路:Sarsa和Q-Learning

前言
本篇博文通过悬崖寻路这一实例来实现Sarsa和Q-Learning算法。
相关代码主要参考自PARL强化学习公开课。.
理论基础
这里简单放一下Sarsa和Q-Learning的更新公式,更详细的内容可参看本专栏后续的知识点整理。
Sarsa:
Q ( s , a ) ← Q ( s , a ) + α ( r + γ Q ( s ′ , a ′ ) − Q ( s , a ) ) Q(s, a) \leftarrow Q(s, a)+\alpha\left(r+\gamma Q\left(s^{\prime}, a^{\prime}\right)-Q(s, a)\right) Q(s,a)←Q(s,a)+α(r+γQ(s′,a′)−Q(s,a))
Q-Learning:
Q ( s , a ) ← Q ( s , a ) + α ( r + γ max a ′ Q ( s ′ , a ′ ) − Q ( s , a ) ) Q(s, a) \leftarrow Q(s, a)+\alpha\left(r+\gamma \max _{a^{\prime}} Q\left(s^{\prime}, a^{\prime}\right)-Q(s, a)\right) Q(s,a)←Q(s,a)+α(r+γa′maxQ(s′,a′)−Q(s,a))
环境介绍

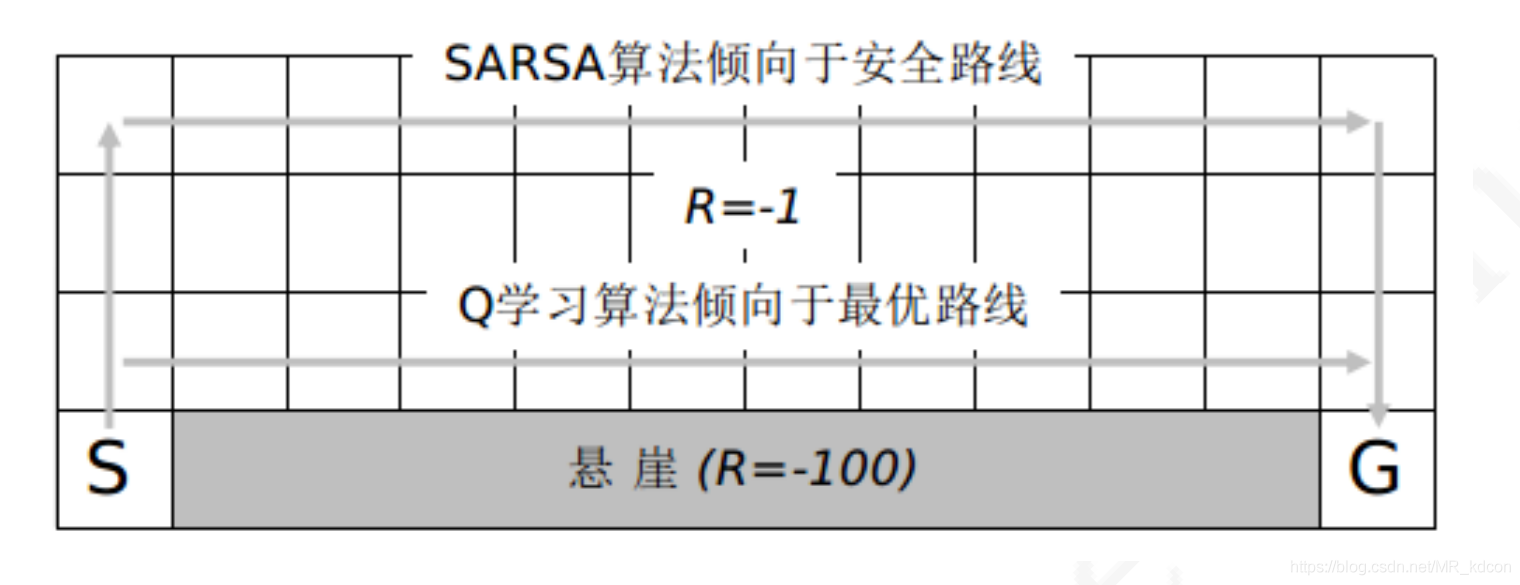
如图所示,红色区域表示悬崖。左下角是起点,右下角是终点。每走一步会获得-1的回报,跌落悬崖会获得-100的回报。智能体需要找到一条路径到达终点,不落入悬崖。
关于Sarsa和Q-Learning的区别,在本专栏的上一篇博文【强化学习】迷宫寻宝:Sarsa和Q-Learning中,已经做了详细的分析,这里不再赘述。
Sarsa
import gym
import numpy as np
import time
class SarsaAgent(object):
def __init__(self, obs_n, act_n, learning_rate=0.01, gamma=0.9, e_greed=0.1):
self.act_n = act_n # 动作维度,有几个动作可选
self.lr = learning_rate # 学习率
self.gamma = gamma # reward的衰减率
self.epsilon = e_greed # 按一定概率随机选动作
self.Q = np.zeros((obs_n, act_n))
# 根据输入观察值,采样输出的动作值,带探索
def sample(self, obs):
if np.random.uniform(0, 1) < (1.0 - self.epsilon): # 根据table的Q值选动作
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) # 有一定概率随机探索选取一个动作
return action
# 根据输入观察值,预测输出的动作值
def predict(self, obs):
Q_list = self.Q[obs, :]
maxQ = np.max(Q_list)
action_list = np.where(Q_list == maxQ)[0] # maxQ可能对应多个action
action = np.random.choice(action_list)
return action
# 学习方法,也就是更新Q-table的方法
def learn(self, obs, action, reward, next_obs, next_action, done):
""" on-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
next_action: 根据当前Q表格, 针对next_obs会选择的动作, a_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * self.Q[next_obs, next_action] # Sarsa
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正q
# 保存Q表格数据到文件
def save(self):
npy_file = './q_table.npy'
np.save(npy_file, self.Q)
print(npy_file + ' saved.')
# 从文件中读取Q值到Q表格中
def restore(self, npy_file='./q_table.npy'):
self.Q = np.load(npy_file)
print(npy_file + ' loaded.')
def run_episode(env, agent, render=False):
total_steps = 0 # 记录每个episode走了多少step
total_reward = 0
obs = env.reset() # 重置环境, 重新开一局(即开始新的一个episode)
action = agent.sample(obs) # 根据算法选择一个动作
while True:
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
next_action = agent.sample(next_obs) # 根据算法选择一个动作
# 训练 Sarsa 算法
agent.learn(obs, action, reward, next_obs, next_action, done)
action = next_action
obs = next_obs # 存储上一个观察值
total_reward += reward
total_steps += 1 # 计算step数
if render:
env.render() # 渲染新的一帧图形
if done:
break
return total_reward, total_steps
def test_episode(env, agent):
total_reward = 0
obs = env.reset()
while True:
action = agent.predict(obs) # greedy
next_obs, reward, done, _ = env.step(action)
total_reward += reward
obs = next_obs
time.sleep(0.5)
env.render()
if done:
break
return total_reward
if __name__ == '__main__':
# 使用gym创建悬崖环境
env = gym.make("CliffWalking-v0") # 0 up, 1 right, 2 down, 3 left
# 创建一个agent实例,输入超参数
agent = SarsaAgent(
obs_n=env.observation_space.n,
act_n=env.action_space.n,
learning_rate=0.1,
gamma=0.9,
e_greed=0.1)
# 训练500个episode,打印每个episode的分数
for episode in range(500):
ep_reward, ep_steps = run_episode(env, agent, False)
print('Episode %s: steps = %s , reward = %.1f' % (episode, ep_steps, ep_reward))
# 全部训练结束,查看算法效果
test_reward = test_episode(env, agent)
print('test reward = %.1f' % (test_reward))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
Q-Learning
import gym
import time
import numpy as np
class QLearningAgent(object):
def __init__(self, obs_n, act_n, learning_rate=0.01, gamma=0.9, e_greed=0.1):
self.act_n = act_n # 动作维度,有几个动作可选
self.lr = learning_rate # 学习率
self.gamma = gamma # reward的衰减率
self.epsilon = e_greed # 按一定概率随机选动作
self.Q = np.zeros((obs_n, act_n))
# 根据输入观察值,采样输出的动作值,带探索
def sample(self, obs):
if np.random.uniform(0, 1) < (1.0 - self.epsilon): # 根据table的Q值选动作
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) # 有一定概率随机探索选取一个动作
return action
# 根据输入观察值,预测输出的动作值
def predict(self, obs):
Q_list = self.Q[obs, :]
maxQ = np.max(Q_list)
action_list = np.where(Q_list == maxQ)[0] # maxQ可能对应多个action
action = np.random.choice(action_list)
return action
# 学习方法,也就是更新Q-table的方法
def learn(self, obs, action, reward, next_obs, done):
""" off-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * np.max(self.Q[next_obs, :]) # Q-learning
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正q
# 把 Q表格 的数据保存到文件中
def save(self):
npy_file = './q_table.npy'
np.save(npy_file, self.Q)
print(npy_file + ' saved.')
# 从文件中读取数据到 Q表格
def restore(self, npy_file='./q_table.npy'):
self.Q = np.load(npy_file)
print(npy_file + ' loaded.')
def run_episode(env, agent, render=False):
total_steps = 0 # 记录每个episode走了多少step
total_reward = 0
obs = env.reset() # 重置环境, 重新开一局(即开始新的一个episode)
while True:
action = agent.sample(obs) # 根据算法选择一个动作
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
# 训练 Q-learning算法
agent.learn(obs, action, reward, next_obs, done)
obs = next_obs # 存储上一个观察值
total_reward += reward
total_steps += 1 # 计算step数
if render:
env.render() # 渲染新的一帧图形
if done:
break
return total_reward, total_steps
def test_episode(env, agent):
total_reward = 0
obs = env.reset()
while True:
action = agent.predict(obs) # greedy
next_obs, reward, done, _ = env.step(action)
total_reward += reward
obs = next_obs
time.sleep(0.5)
env.render()
if done:
break
return total_reward
if __name__ == '__main__':
# 使用gym创建悬崖环境
env = gym.make("CliffWalking-v0") # 0 up, 1 right, 2 down, 3 left
# 创建一个agent实例,输入超参数
agent = QLearningAgent(
obs_n=env.observation_space.n,
act_n=env.action_space.n,
learning_rate=0.1,
gamma=0.9,
e_greed=0.1)
# 训练500个episode,打印每个episode的分数
for episode in range(500):
ep_reward, ep_steps = run_episode(env, agent, False)
print('Episode %s: steps = %s , reward = %.1f' % (episode, ep_steps, ep_reward))
# 全部训练结束,查看算法效果
test_reward = test_episode(env, agent)
print('test reward = %.1f' % (test_reward))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
运行结果
参考资料
PARL强化学习公开课
强化学习之Q-learning与Sarsa算法解决悬崖寻路问题
文章来源: zstar.blog.csdn.net,作者:zstar-_,版权归原作者所有,如需转载,请联系作者。
原文链接:zstar.blog.csdn.net/article/details/124067095

- 点赞
- 收藏
- 关注作者
评论(0)