【特征提取】Hog特征原理简介与代码实践

前言
在【模式识别】SVM实现人脸表情分类一文中,我曾使用Hog特征+SVM的方式实现表情分类,但对于Hog特征的原理并未做深入整理。此篇将结合scikit-image来简单分析Hog特征的原理和维度关系。因为没看过原论文,因此自己的理解可能会有偏差,如有错误,欢迎评论区指正。
图像梯度
在进入到Hog之前,需要先了解图像中梯度的概念。
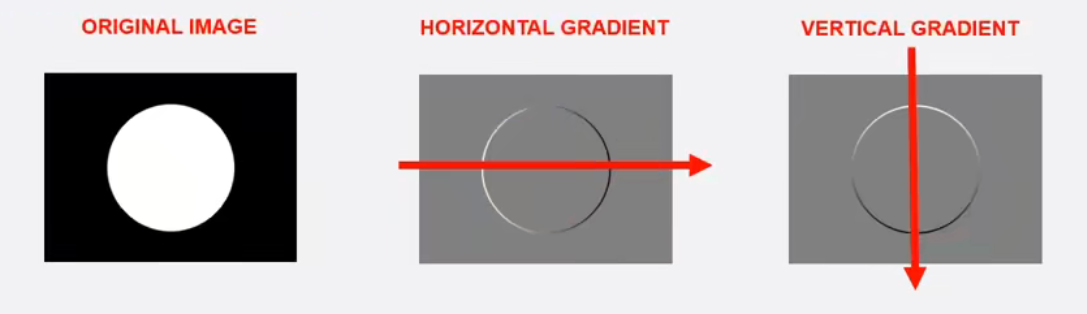
以下图为例(图源:[1]),黑色像素点值为0,白色像素点值为1,分别求X方向梯度和Y方向梯度,从后两幅图可以看出,当箭头从0突变到1时,梯度为正值,图像中以白色边缘表示,反之为负值,以黑色的阴影表示。
更进一步,把X方向的梯度和Y方向的梯度进行融合,这样可以计算出每一个像素点的融合梯度大小和方向。
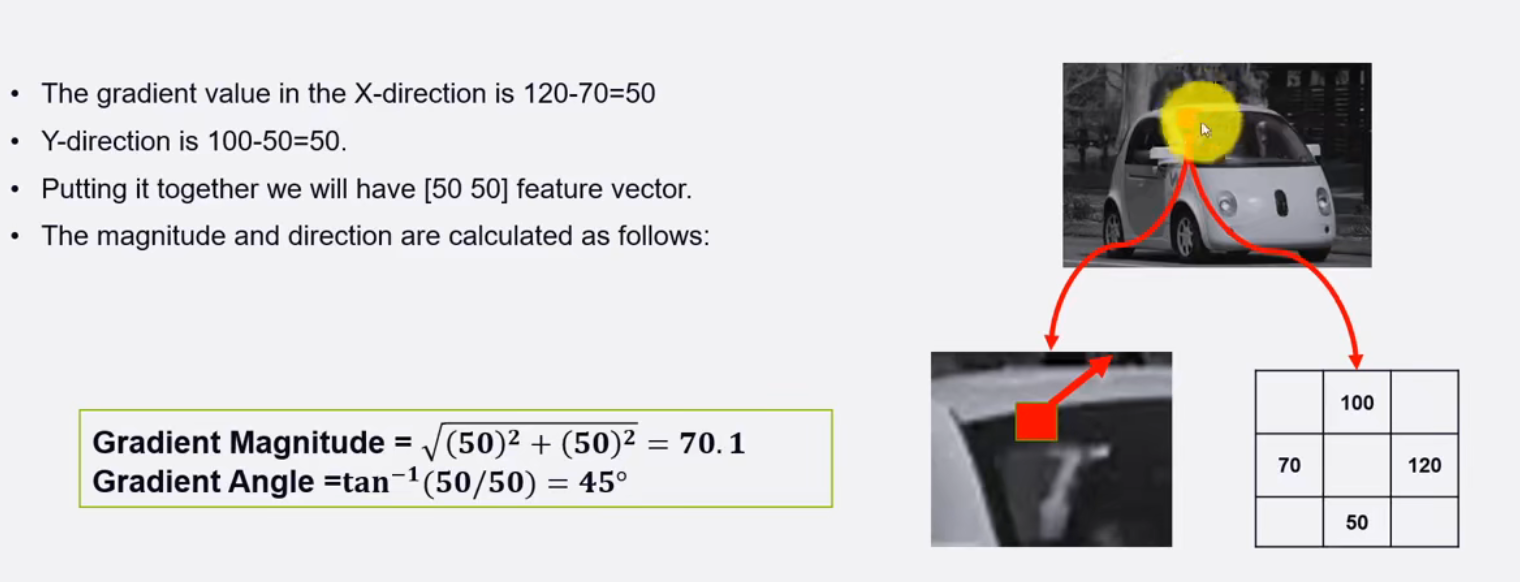
例如,上图中选择了一个像素点,其相邻位置的像素大小如宫格所示,X方向梯度大小为50,Y方向梯度大小为50,那么其融合梯度大小为70.1,方向为45°。
计算公式的数学表达如下[2]:

有了上面的概念之后,下面进入到Hog特征提取的流程。
标准化gamma空间和颜色空间(Gamma/Colour Normalization)
标准化gamma空间和颜色空间是Hog特征提取的第一步。
这一步主要做了3个操作:
-
1、因为颜色信息影响不大,因此先转化为灰度图;
-
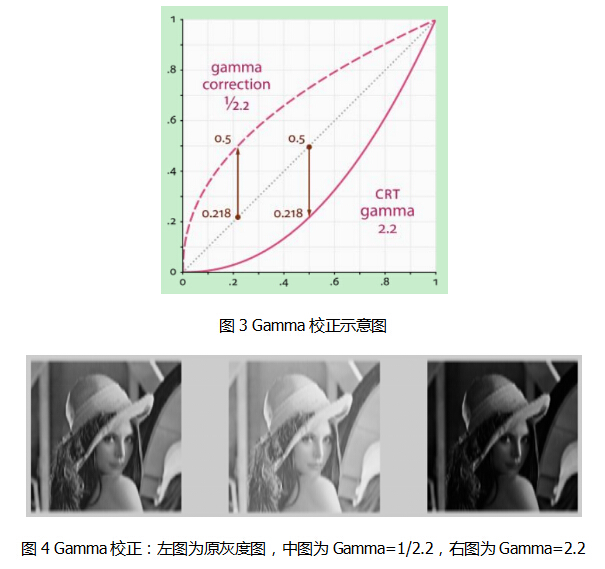
2、进行gamma校正:
gamma<1在高灰度值区域内,动态范围变小,图像对比度降低,图像整体灰度值变大,显得亮一些;gamma>1在低灰度值区域内,动态范围变小,图像对比度降低,图像整体灰度值变小,变得暗淡[3]

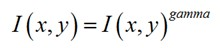
校正公式如下:
校正的好处在于:能够有效地降低图像局部的阴影和光照变化 -
3、对图像尺寸进行重新调整,并让各像素进行归一化;
计算图像梯度
图像预处理之后,就要计算图中每一个像素点的梯度。之前已经给出了图像梯度的计算公式,但在实际使用中,两个方向上的梯度分量可以用卷积的方式来快速计算。
- x方向的梯度分量gradscalx:用[-1,0,1]梯度算子对原图像做卷积运算
- y方向的梯度分量gradscaly:用[1,0,-1]梯度算子对原图像做卷积运算
为每个细胞单元构建梯度方向直方图
下面就需要引入一个细胞单元(Cell)的概念,这里Cell的尺寸可以自由设定,我这里以8 X 8 的尺寸为例,如下图所示:
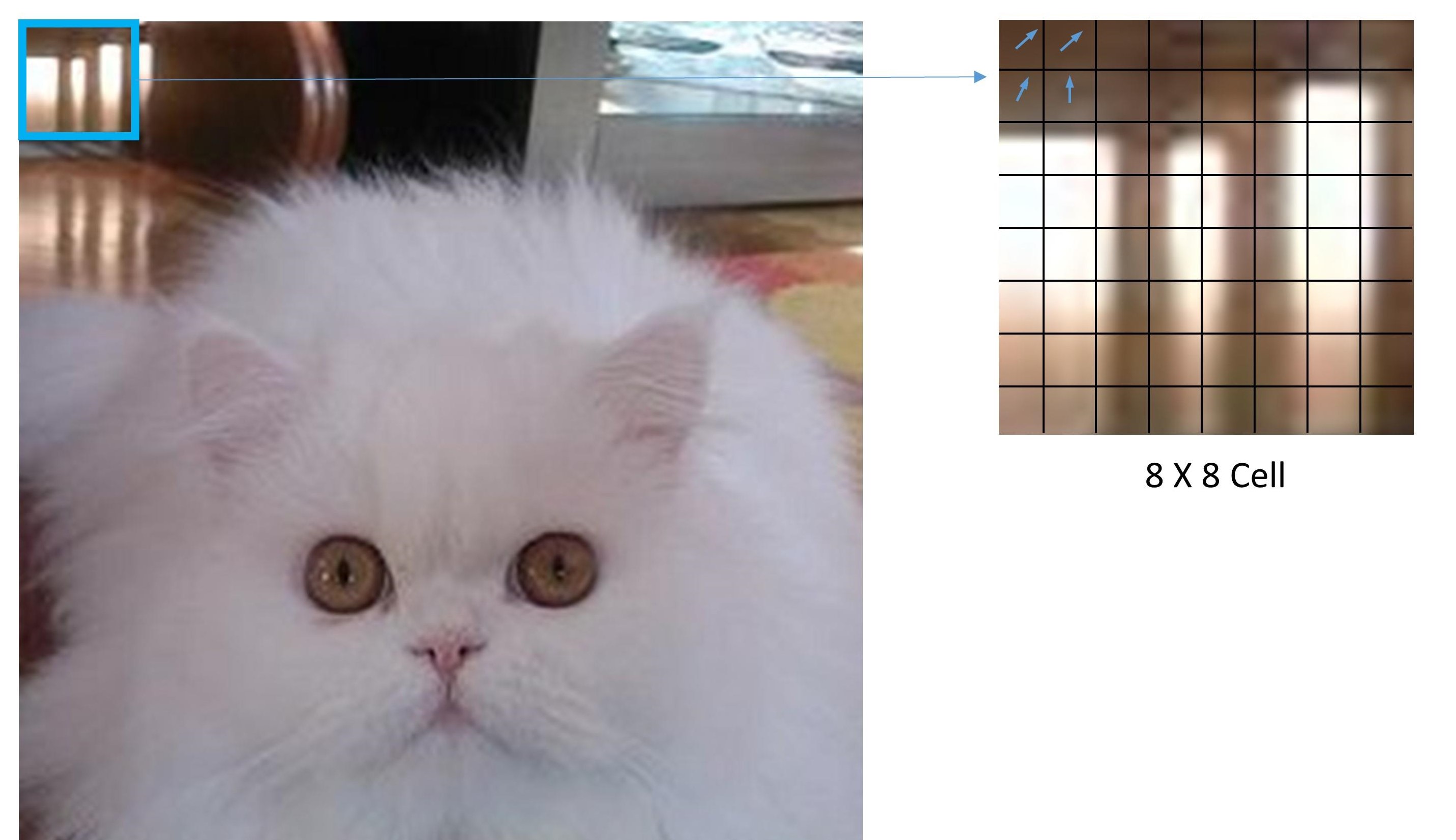
这张猫选自VOC2012数据集,我对其进行了一定的裁剪。
这里的8 X 8指代一个Cell中包含8 X 8个像素点,例如图中的网格,每个网格代表一个像素点,对于每一个像素点可以计算出一个梯度值和方向。
下面就要统计每个Cell的梯度直方图,通常来说,直方图是用来统计频率的。这里也类似,因此,需要先把360°角度进行分类。按照原作者的说法,分成9份效果最好。于是就有了下面这张图[3]:
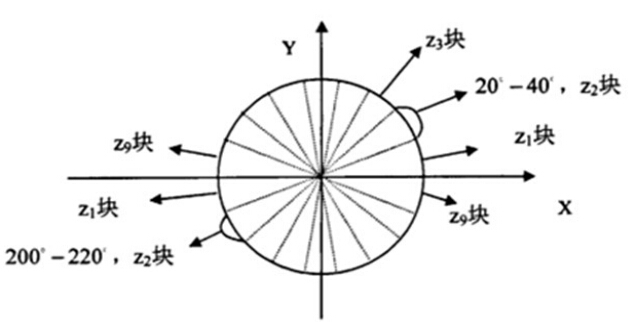
这里表示的是每一块为20°,这里初次看可能会有个疑问:360°/9 = 40°,每一块是40°才对,为什么是20°呢?
这是由于角度只看了数值,因此正角度和负角度的符号进行忽略,因此180°/9 = 20°
举个例子,第一个像素点梯度方向为45°,40°<45°<60°,这样它就被划分到第三组。
以此类推,统计一个Cell中每个像素点的角度,就可以得到梯度方向直方图。
把细胞单元组合成大的块(block),并归一化梯度直方图
下一步就要引入另一个新概念:块(block),一些博文中也称作窗口(windows),应该是同一个东西。
还是拿这张猫图举例,假设block的大小为2 X 2,那么就包含2 X 2个cell,所占据的尺寸为(16,16)个像素。
如图中的蓝框代表cell,黄框代表block,这里block的大小也是通过人为指定。
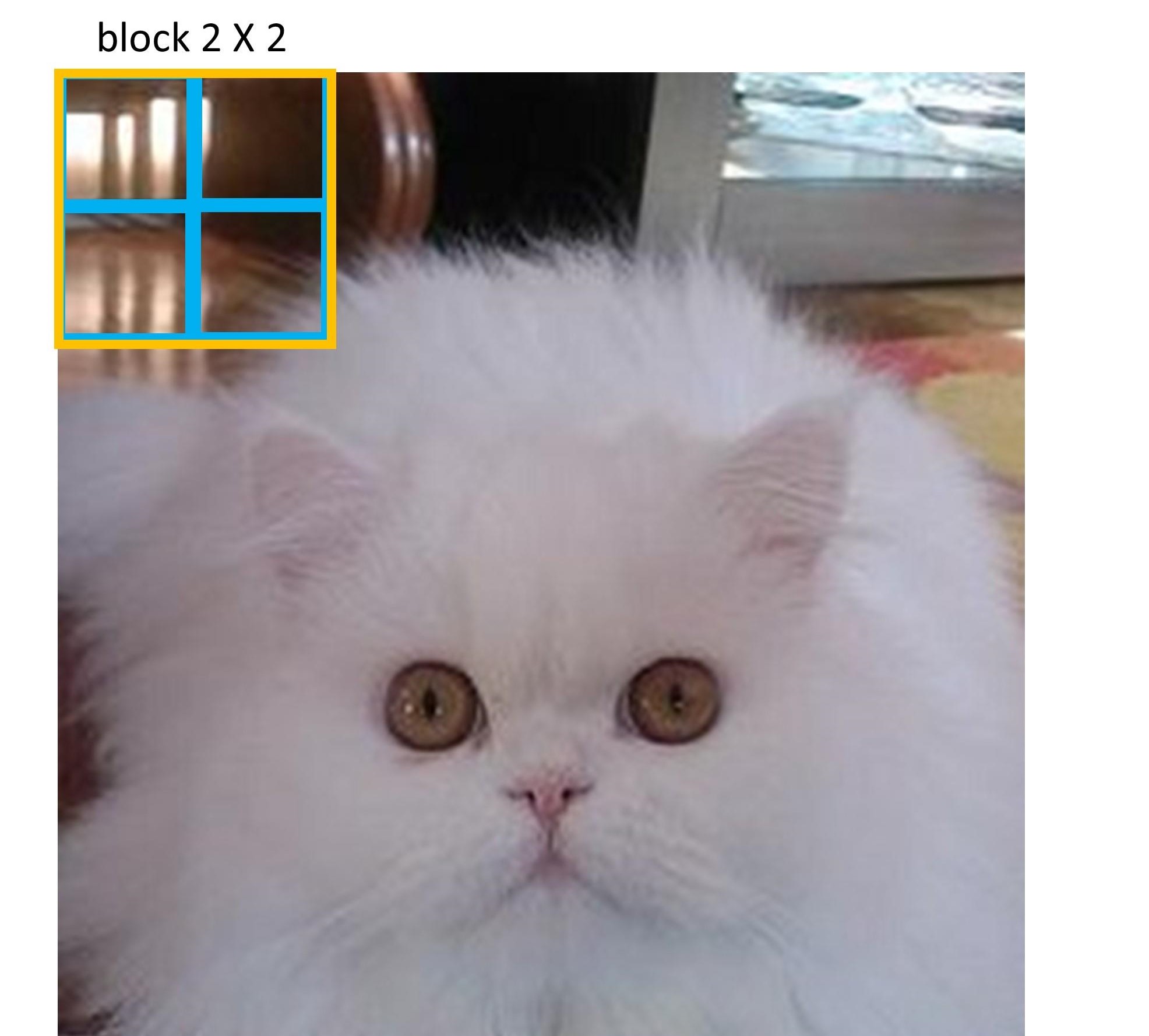 这样,一个block内所有cell的特征向量串联起来便得到该block的HOG特征,同时,需要在块内进行归一化。归一化的方法大致有四种:
这样,一个block内所有cell的特征向量串联起来便得到该block的HOG特征,同时,需要在块内进行归一化。归一化的方法大致有四种:
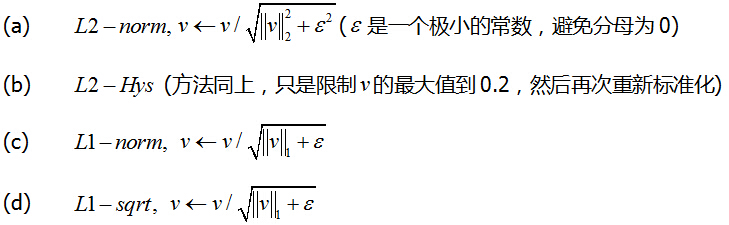
根据原作者描述,使用L2-Hys方法效果最好[3]。
至于这里的大小设置,个人理解是和目标的尺寸有关。例如,行人检测的最佳参数设置是:3×3细胞/区间、6×6像素/细胞、9个直方图通道[3]。
移动block,计算维度
下面就到最后一步,一张图里有多个像素,那么通过计算之后,整张图的hog特征的维度是多少呢?
这里我们进入实践,来通过实践来理解block是如何移动的。
首先导库,使用opencv和skimage
import cv2
from skimage.feature import hog
- 1
- 2
定义数据预处理过程,调整图片尺寸为256x256,并将图片进行灰度化和归一化
def preprocessing(src):
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) # 将图像转换成灰度图
img = cv2.resize(gray, (256, 256)) # 尺寸调整g
img = img/255.0 # 数据归一化
return img
- 1
- 2
- 3
- 4
- 5
提取Hog特征
img = cv2.imread("test.jpg")
img_afterpro = preprocessing(img)
image_features = hog(img_afterpro, orientations=9, pixels_per_cell=(8, 8), cells_per_block=(16, 16), block_norm='L2-Hys')
- 1
- 2
- 3
这里有多个参数,主要的四个参数解释和默认取值如下:
- orientations:方向数
- pixels_per_cell:胞元大小
- cells_per_block:块大小
- block_norm:可选块归一化方法L2-Hys(L2范数)

这里图片的大小为(256,256),cell的大小选择为(8,8),block设置为(16,16),那么hog特征总的维度是多少呢?起初我的理解是多个block平铺整个图像,那么每个block大小为(8x16,8x16)=(128,128),即整幅图像有四个block,那么总维度应该是16x16x9x2x2=9216然而通过验证
image_features.shape
- 1
输出的实际维度应为665856,差得很远!
于是我想到了卷积神经网络中卷积核的滑动窗口的运动方式,假设这里block也是以滑动窗口的方式进行运动,每次运动的步长为一个cell的宽度,如下图所示:

这里的block应该是(16,16),我这里为了作图方便,仍保留为(2,2),旨在领会传达的意思。
如图所示,每个block计算完成之后,向水平/垂直方向移动一个cell的宽度,这样前一部分的cell会和下一个block再次计算。
这样block总的个数可以这样计算:
水平方向block个数=(256-128)/8 + 1 =17
垂直方向block个数=水平方向block个数=17
那么总维度=16x16x9x17x17=665856
结果证实,该思路是正确的。
Reference
[1]https://www.bilibili.com/video/BV1dz411B7Rd
[2]https://blog.csdn.net/zouxy09/article/details/7929348
[3]https://blog.csdn.net/qq_37791134/article/details/81413758
文章来源: zstar.blog.csdn.net,作者:zstar-_,版权归原作者所有,如需转载,请联系作者。
原文链接:zstar.blog.csdn.net/article/details/124855786

- 点赞
- 收藏
- 关注作者
评论(0)