深度学习基础:5.CIFAR10数据集分类及GPU使用实例

前言
上篇博文整理了如何用Pytorch搭建一个基本网络模型,本篇进行一个图像分类任务实操。
相关代码主要参考自官网教程:
https://pytorch.org/tutorials/beginner/blitz/cifar10_tutorial.html#sphx-glr-beginner-blitz-cifar10-tutorial-py
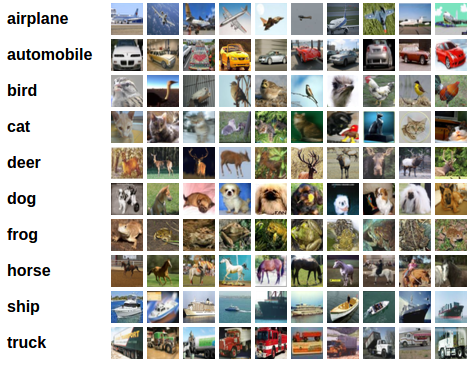
数据集简介
CIFAR10数据集总共包含10个类别,每张图片为3通道的RGB图片,大小为32x32像素。
数据集下载与预处理
使用torchvision.datasets可以下载经典数据集,设置下载路径root和download=True,电脑会自动检测root路径下有无数据集,若不存在数据集,则自动进行下载。
数据预处理使用到了torchvision.transforms这个工具包。
- transforms.Compose
能够将多个预处理步骤进行合并 - transforms.ToTensor()
将数据归一化到(0,1),原始图像数据范围是(0,255),归一化有利于加快运算 - transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
对数据进行标准化,公式是(x-mean)/std,前一个是三通道的均值,后一个是三通道的方差,处理之后数值范围为(-1,1)
经过处理后,数据服从正态分布。
import torch
import torchvision
import torchvision.transforms as transforms
transform = transforms.Compose(
[transforms.ToTensor() # 归一化到(0,1)
,transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 再 (x-mean)/std,归一化到(-1,1)
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
定义卷积神经网络
卷积层 nn.Conv2d,最大池化层nn.MaxPool2d,数值不做具体分析。
注意里面有个view的小技巧x.view(-1, 16 * 5 * 5),-1代表让程序自行进行计算填充。
import torch.nn as nn
import torch.nn.functional as F
class MyNet(nn.Module):
def __init__(self):
super(MyNet, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
定义损失函数
使用SGD优化器,交叉熵损失
import torch.optim as optim
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(mynet.parameters(), lr=0.001, momentum=0.9)
训练
使用CPU进行训练
# 在 Jupyter 中的进度条
from tqdm.notebook import tqdm
import torch.optim as optim
n_epochs = 2
n_batches = 100
mynet = MyNet()
model_path = "cifar_net.pth"
mynet.load_state_dict(torch.load(model_path))
pbar = tqdm(total=n_epochs)
# 使用训练数据训练 n_epochs 轮
for epoch in range(n_epochs):
# 当前 n_batches 个小批次训练数据上的平均损失
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# 获取输入数据,这里 data 是形如 [inputs, labels] 的列表
inputs, labels = data
# 对梯度进行清零操作,防止错误的梯度累加
optimizer.zero_grad()
# 前向传播
outputs = mynet(inputs)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播并更新模型参数
loss.backward()
optimizer.step()
# 统计损失函数的滑动平均
running_loss += loss.item()
if (i+1) % n_batches == 0:
pbar.set_postfix(batch=i+1, loss=running_loss/n_batches)
running_loss = 0.0
pbar.update() # 更新进度条
print('训练完成')
model_path = "cifar_net_100.pth"
torch.save(mynet.state_dict(), model_path)
调用GPU进行训练
调用GPU训练很简单,首先写这句device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")来判断电脑上的GPU是否好用,如果可以用就调用第0块GPU。后面再将数据和模型.to(device)放置到GPU上就可以了。
在老版本中,也看到.cuda()这种写法,效果一样。
GPU版本训练代码如下,可和上面这段进行对比。
# 在 Jupyter 中的进度条
from tqdm.notebook import tqdm
import torch.optim as optim
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
n_epochs = 2
n_batches = 100
mynet = MyNet()
mynet = mynet.to(device)
model_path = "cifar_net.pth"
mynet.load_state_dict(torch.load(model_path))
pbar = tqdm(total=n_epochs)
# 使用训练数据训练 n_epochs 轮
for epoch in range(n_epochs):
# 当前 n_batches 个小批次训练数据上的平均损失
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# 获取输入数据,这里 data 是形如 [inputs, labels] 的列表
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device)
# 对梯度进行清零操作,防止错误的梯度累加
optimizer.zero_grad()
# 前向传播
outputs = mynet(inputs)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播并更新模型参数
loss.backward()
optimizer.step()
# 统计损失函数的滑动平均
running_loss += loss.item()
if (i+1) % n_batches == 0:
pbar.set_postfix(batch=i+1, loss=running_loss/n_batches)
running_loss = 0.0
pbar.update() # 更新进度条
print('训练完成')
model_path = "cifar_net_100.pth"
torch.save(mynet.state_dict(), model_path)
我的显卡版本是RTX2060,在Jupyter中,可以使用%%time语句来统计cell的执行时间。实测下来,GPU和CPU训练速度并没有明显差异,个人猜测可能是由于该数据量不大的原因。
测试
整体测试
加载模型,在测试集上评估模型性能
mynet = MyNet()
model_path = "cifar_net_100.pth"
mynet.load_state_dict(torch.load(model_path))
correct = 0
total = 0
# 评估时无需计算梯度
with torch.no_grad():
for data in testloader:
# 获取数据集中的图像及对应标签真值
images, labels = data
# 计算网络的预测的图像概率向量
outputs = mynet(images)
# 根据网络输出概率获得预测标签 torch.max
_, predicted = torch.max(outputs.data, 1)
# 累计样本总数
total += labels.size(0)
# 累加正确预测的样本数
correct += (predicted == labels).sum().item()
print('网络在测试集上的准确率是: %3.1f %%' % (100*correct/total))
各类样本测试
统计各类别测试样本准确率
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = mynet(images)
_, predicted = torch.max(outputs, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i].item()
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (
classes[i], 100 * class_correct[i] / class_total[i]))
运行结果:

文章来源: zstar.blog.csdn.net,作者:zstar-_,版权归原作者所有,如需转载,请联系作者。
原文链接:zstar.blog.csdn.net/article/details/125752073

- 点赞
- 收藏
- 关注作者
评论(0)