matlab利用已有激光雷达数据寻找地平面和车辆周围的障碍物仿真实验

【摘要】
文章目录
第一步:显示激光三维点云第二步:激光点云颜色映射。第三步:分割主车辆第四步:分割地平面。第五步:分割障碍物。第六步:显示激光雷达数据处理结果。
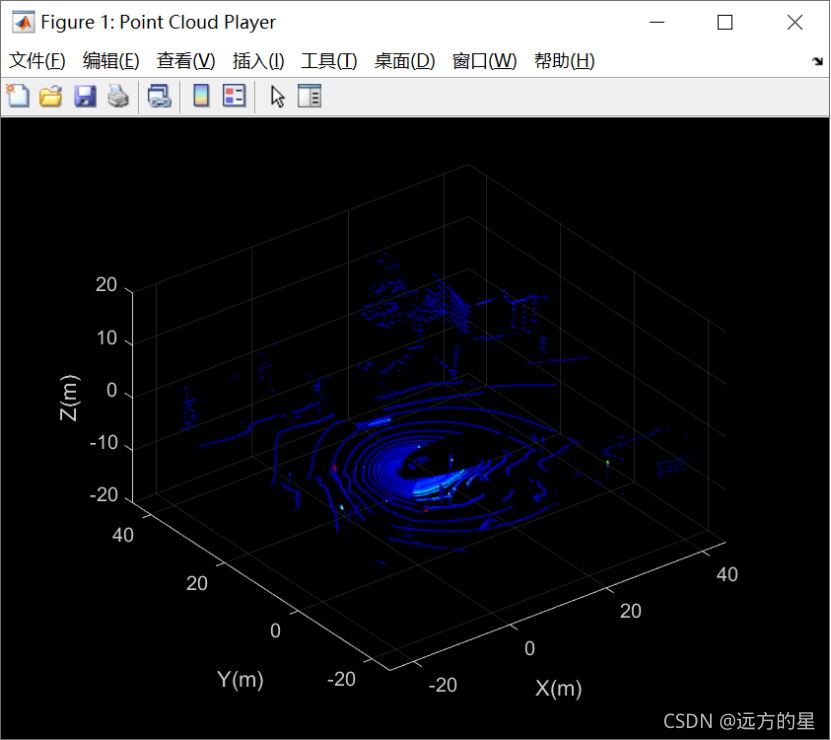
第一步:显示激光三维点云
fi...
第一步:显示激光三维点云
fileName = 'lidarData_ConstructionRoad.pcap';
deviceModel = 'HDL32e';
veloReader = velodyneFileReader(fileName,deviceModel);
ptCloud = readFrame(veloReader);
xlimits = [-25,45];ylimits = [-25,45];zlimits = [-20,20];
lidarViewer = pcplayer(xlimits,ylimits,zlimits);
xlabel(lidarViewer.Axes,'X(m)')
ylabel(lidarViewer.Axes,'Y(m)')
zlabel(lidarViewer.Axes,'Z(m)')
view(lidarViewer,ptCloud)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
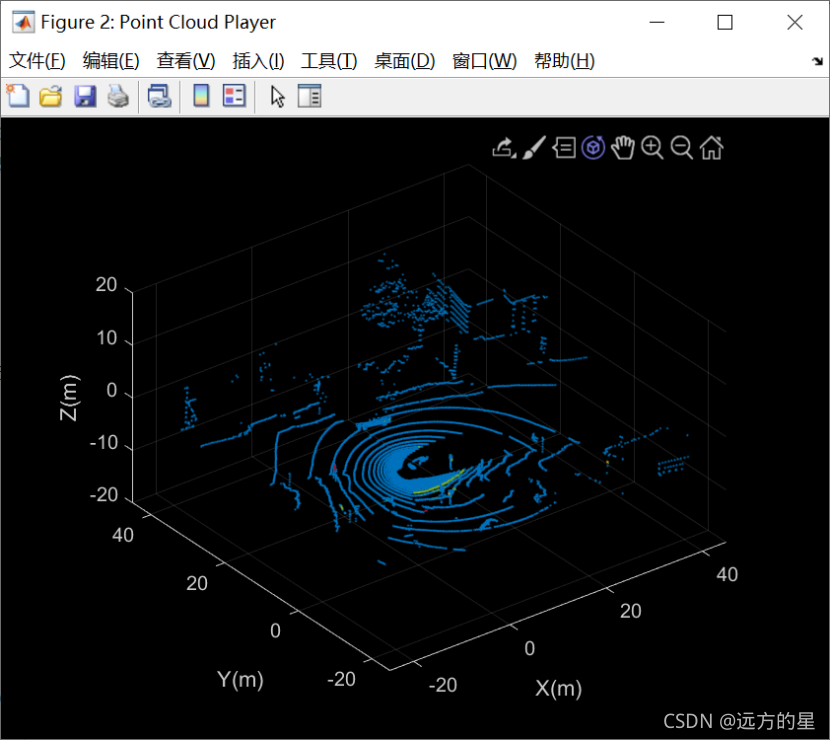
第二步:激光点云颜色映射。
为了分割属于地平面、主车辆和附近障碍物的点,需要设置颜色标签,并进行颜色映射。
colorLabels=[0,0.4470,0.7410;0.4660 0.6740 0.1880;0.929,0.694,0.125;0.635,0.078,0.1840];
colors.Unlabeled=1;
colors.Ground=2;
colors.Ego=3;
colors.Obstacle=4;
colormap(lidarViewer.Axes, colorLabels)
- 1
- 2
- 3
- 4
- 5
- 6
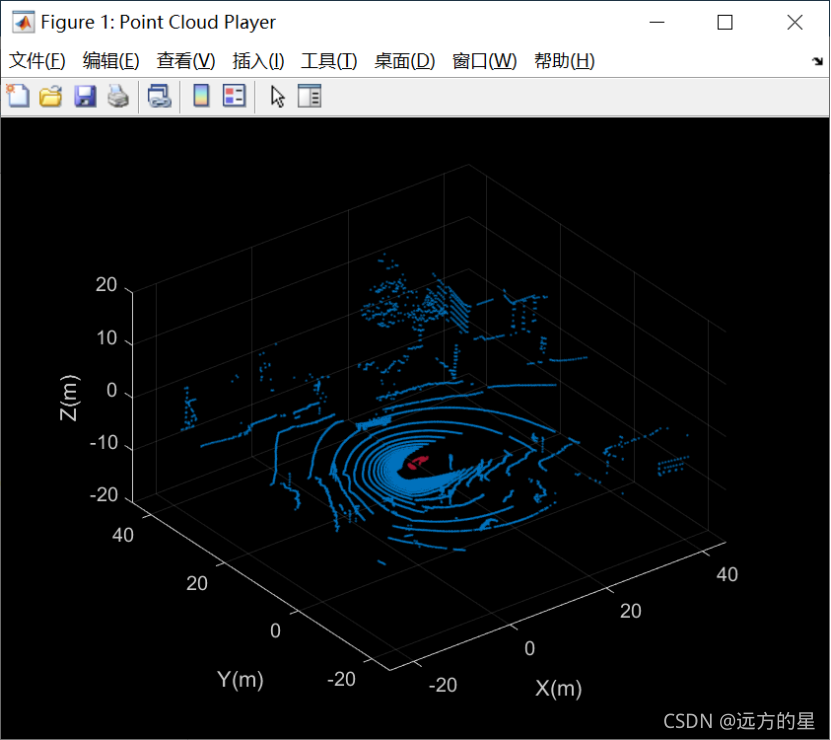
第三步:分割主车辆
vehicleDims=vehicleDimensions ();
mountLocation= [vehicleDims.Length/2-vehicleDims.RearOverhang,...
0,vehicleDims.Height];
points=struct();
points.EgoPoints=helperSegmentEgoFromLidarData(ptCloud,vehicleDims, mountLocation);
closePlayer=false;
helperUpdateView(lidarViewer,ptCloud,points,colors,closePlayer);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
helperSegmentEgoFromLidarData函数程序如下:
function egoPoints=helperSegmentEgoFromLidarData(ptCloud, vehicleDims,mountLocation)
bufferZone= [0.1,0.1,0.1];
egoXMin=-vehicleDims.RearOverhang-bufferZone (1);
egoXMax=egoXMin+vehicleDims.Length+bufferZone (1);
egoYMin=-vehicleDims.Width/2-bufferZone (2);
egoYMax=egoYMin+vehicleDims.Width+bufferZone (2);
egoZMin=0-bufferZone (3);
egoZMax=egoZMin+vehicleDims. Height+bufferZone (3);
egoXLimits= [egoXMin, egoXMax];
egoYLimits= [egoYMin, egoYMax];
egoZLimits= [egoZMin, egoZMax];
egoXLimits=egoXLimits-mountLocation(1);
egoYLimits=egoYLimits-mountLocation(2);
egoZLimits=egoZLimits-mountLocation(3);
egoPoints=ptCloud.Location(:,:,1)>egoXLimits(1)...
& ptCloud. Location(:,:,1) <egoXLimits(2)...
& ptCloud. Location(:,:,2) >egoYLimits(1)...
& ptCloud. Location(:,:,2) <egoYLimits(2)...
& ptCloud. Location(:,:,3) >egoZLimits(1)...
& ptCloud. Location(:,:,3) <egoZLimits(2);
End

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
helperUpdateView函数程序如下:
function isPlayerOpen=helperUpdateView(lidarViewer,ptCloud,points,colors,closePlayer)
if closePlayer
hide (lidarViewer);
isPlayerOpen=false;
return;
end
scanSize=size (ptCloud.Location);
scanSize=scanSize (1:2);
colormapValues=ones (scanSize,'like',ptCloud.Location) * colors.Unlabeled;
if isfield(points,'GroundPoints')
colormapValues (points.GroundPoints)=colors.Ground;
end
if isfield(points, 'EgoPoints')
colormapValues (points.EgoPoints)=colors.Ego;
end
if isfield (points, 'ObstaclePoints')
colormapValues (points.ObstaclePoints)=colors.Obstacle;
end
view (lidarViewer,ptCloud. Location, colormapValues)
isPlayerOpen=isOpen (lidarViewer);
End
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
第四步:分割地平面。
为了从激光雷达数据中检测障碍物,首先对地平面进行分段,从有组织的激光雷达数据中分割出属于地平面的点。
elevationDelta = 10;
points.GroundPoints=segmentGroundFromLidarData(ptCloud,'ElevationAngleDelta', elevationDelta);
helperUpdateView(lidarViewer,ptCloud,points,colors,closePlayer);
- 1
- 2
- 3
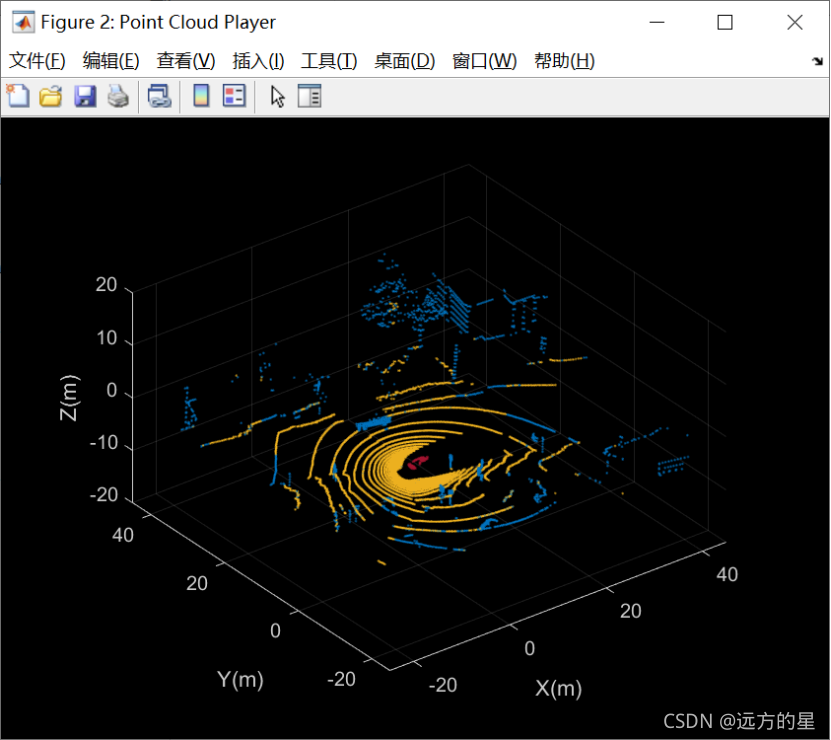
第五步:分割障碍物。
nonEgoGroundPoints=~points.EgoPoints &~points.GroundPoints;
ptCloudSegmented=select(ptCloud,nonEgoGroundPoints,'OutputSize','full');
sensorLocation=[0,0,0];
radius=40;
points.ObstaclePoints=findNeighborsInRadius(ptCloudSegmented,sensorLocation,radius);
helperUpdateView(lidarViewer,ptCloud,points,colors,closePlayer);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
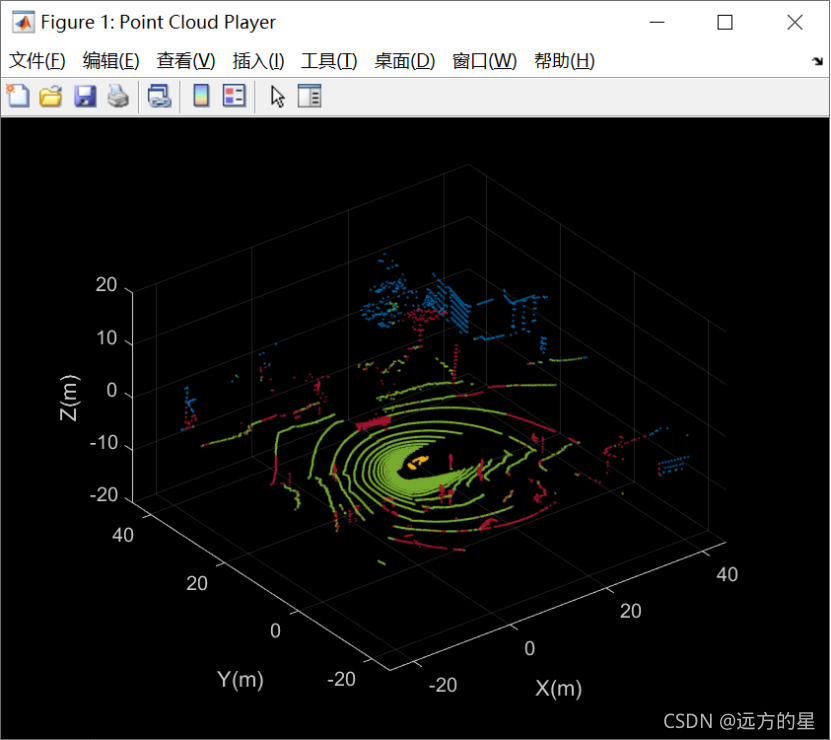
第六步:显示激光雷达数据处理结果。
从激光雷达记录的数据序列中处理20s。
reset(veloReader);
stopTime=veloReader.StartTime+seconds(20);
isPlayerOpen=true;
while hasFrame(veloReader)&&veloReader.CurrentTime<stopTime&&isPlayerOpen
ptCloud=readFrame(veloReader);
points.EgoPoints=helperSegmentEgoFromLidarData(ptCloud,vehicleDims,mountLocation);
points.GroundPoints=segmentGroundFromLidarData(ptCloud,'ElevationAngleDelta',elevationDelta);
nonEgoGroundPoints=~points.EgoPoints&~points.GroundPoints;
ptCloudSegmented=select(ptCloud,nonEgoGroundPoints,'OutputSize','full');
points.ObstaclePoints=findNeighborsInRadius(ptCloudSegmented,sensorLocation,radius);
closePlayer=~hasFrame(veloReader);
isPlayerOpen=helperUpdateView(lidarViewer,ptCloud,points,colors,closePlayer);
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13

文章来源: luckystar.blog.csdn.net,作者:爱打瞌睡的CV君,版权归原作者所有,如需转载,请联系作者。
原文链接:luckystar.blog.csdn.net/article/details/120120310

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)