【愚公系列】2022年06月 ARM汇编 指令集

学习ARM的指令集
ARM处理器有两种工作状态ARM和Thumb。这两种工作状态和运行模式没有任何关系。比如不论是ARM还是Thumb状态的代码都可以运行在用户模式下。这两种工作状态之间最大的差异是指令集,ARM状态的指令长度是32位的,Thumb状态的指令长度是16位的(也可能为32位)。了解如何使用Thumb工作状态对于编写ARM平台的漏洞利用是至关重要的。当我们编写ARM shellcode时,需要使用16 bit的Thumb指令代替32 bit的ARM指令,从而避免在指令中出现’\0’截断。
Thumb有不同的版本,下面我们对不同的版本做一下简单的介绍,注意不同的命名只是为了区分不同的版本(换句话说,处理器只知道它运行在Thumb状态,其它一概不知)。
· Thumb-1(16位指令):用于ARMv6和更早的版本。
· Thumb-2(16位和32位指令):对Thumb-1的扩展,添加了更多指令并允许它们为16位或32位宽(ARMv6T2,ARMv7)。
· ThumbEE:在Thumb-2基础上包含了针对动态代码生成(代码在执行前或执行期间编译代码)的一些变更和补充。
- 简单介绍ARM的指令集和它的基本用法
1)ARM指令通常跟一到两个操作数,我们使用如下模板描述:
MNEMONIC{S}{condition} {Rd}, Operand1, Operand2
其中各个字段的作用如下:
MNEMONIC - 指令的助记符如ADD
{S} - 可选的扩展位,如果指令后加了S,将依据计算结果更新CPSR寄存器中相应的FLAG
{condition} - 执行条件,如果没有指定,默认为AL(无条件执行)
{Rd} - 目的寄存器,存储指令计算结果
Operand1 - 第一个操作数,可以是一个寄存器或一个立即数
Operand2 - 第二个(可变)操作数,可以是一个立即数或寄存器甚至带移位操作的寄存器
助记符、S扩展位、目的寄存器和第一个操作数的作用很好理解,不多做解释,这里补充解释一下执行条件和第二个操作数。设置了执行条件的指令在执行指令前先校验CPSR寄存器中的标志位,只有标志位的组合匹配所设置的执行条件指令才会被执行。第二个操作数被称为可变操作数,因为它可以被设置为多种形式,包括立即数、寄存器、带移位操作的寄存器,如下所示:
#123 - 立即数
Rx - 寄存器比如R1
Rx, ASR n - 对寄存器中的值进行算术右移n位后的值
Rx, LSL n - 对寄存器中的值进行逻辑左移n位后的值
Rx, LSR n - 对寄存器中的值进行逻辑右移n位后的值
Rx, ROR n - 对寄存器中的值进行循环右移n位后的值
Rx, RRX - 对寄存器中的值进行带扩展的循环右移1位后的值
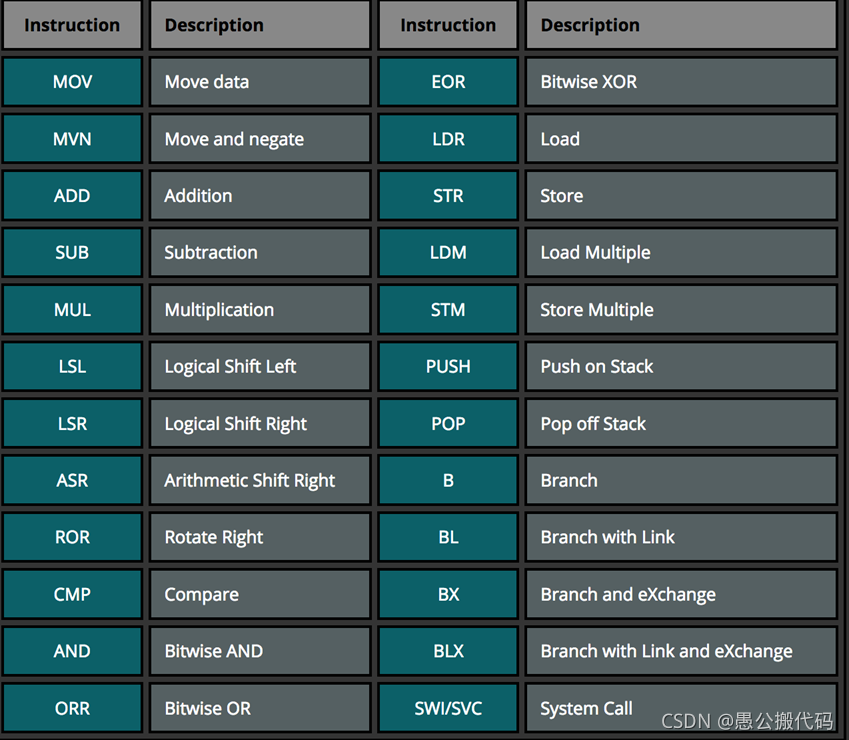
2)常见的指令包括:

- 点赞
- 收藏
- 关注作者
评论(0)