经典/最新计算机视觉论文及代码推荐

CVPR 2022 论文尚没有完全公布,今日推荐几篇已出目标跟踪方向的论文,既有单目标跟踪也有多目标跟踪,具体可以详见论文原文和代码,跑一跑看看效果。
具有记忆的多目标跟踪
-
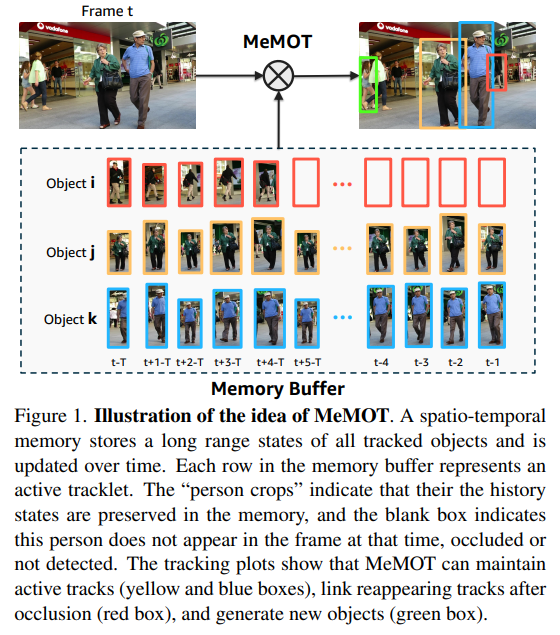
论文题目:MeMOT: Multi-Object Tracking with Memory
-
论文链接:https://arxiv.org/abs/2203.16761
作者提出了一个通用的检测与关联框架,使多目标跟踪可跟踪到长时间消失的目标,具体做法使用一个大的时空记忆存储目标的身份信息,并可据此自适应参考和聚合有用的信息。
记忆模块这么强,会不会成为后续多目标跟踪算法的标配呢?
无人机视觉中的目标跟踪
-
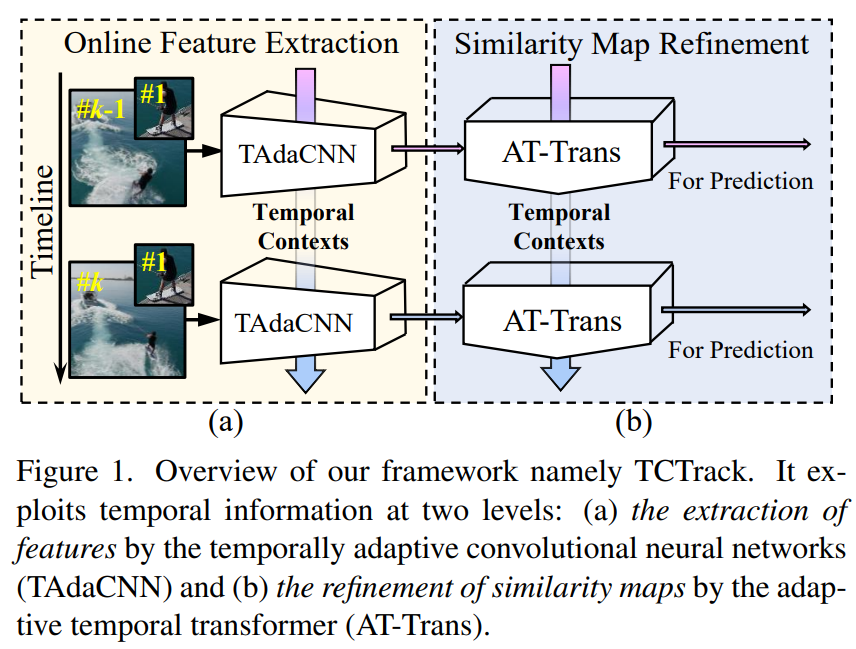
论文题目:TCTrack: Temporal Contexts for Aerial Tracking
-
论文链接:https://arxiv.org/abs/2203.01885
-
代码链接:https://github.com/vision4robotics/TCTrack
建模“连续帧之间的时间上下文信息”,精度高、速度快,在真实世界的无人机上测试,其在 NVIDIA Jetson AGX Xavier 上的速度超过 27 FPS。
基于 Transformer 的全局跟踪方法(多目标跟踪)
-
论文题目:Global Tracking Transformers
-
论文链接:https://arxiv.org/pdf/2203.13250.pdf
-
代码链接:https://github.com/xingyizhou/GTR
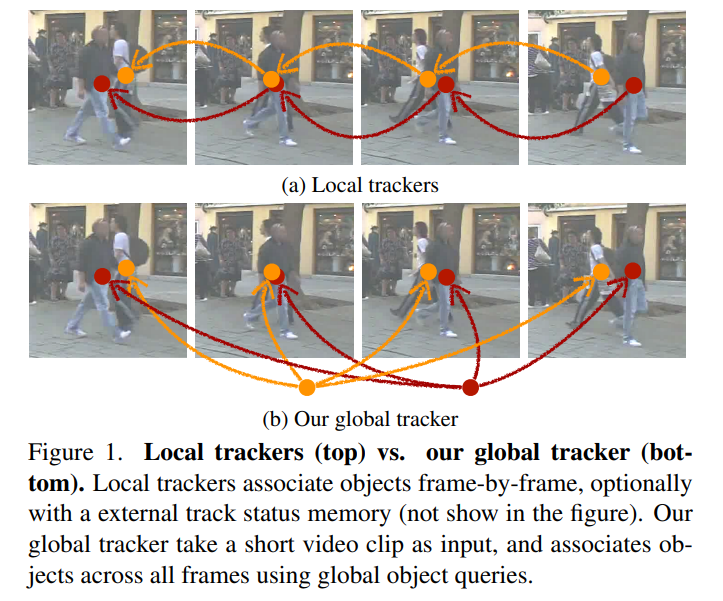
以往多目标跟踪技术中 tracking-by-detection 的方法,需要对相邻帧的目标进行“成对关联”,作者提出的方法是对多帧图像序列中的目标进行“全局关联”,取得了 MOTA 75.3 mAP 和 HOTA 59.1 mAP 的成绩,在TAO数据集上超出baseline 7.7 mAP。
将多目标跟踪和单目标跟踪统一建模的基于Transformer 的跟踪方法
-
论文题目:Global Tracking Transformers
-
论文链接:https://arxiv.org/abs/2203.15175
-
代码链接:https://github.com/Flowerfan/Trackron(还没发布)
以往多目标跟踪和单目标跟踪是计算机视觉领域中两个相对独立的领域,该文为跟踪问题建立了统一的基于Transformer 的方法 Unified Transformer Tracker (UTT) ,SOT 和 MOT 任务都可以在这个框架内解决。

后续
下一期最新/经典视觉论文敬请期待!
文章来源: blog.csdn.net,作者:小小谢先生,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/xiewenrui1996/article/details/125233024

- 点赞
- 收藏
- 关注作者
评论(0)