Google Earth Engine(GEE)——基于s2影像的实时全球10米土地利用/土地覆盖(LULC)数据集

全球动态土地分类数据集是一个10米的近实时(NRT)土地利用/土地覆盖(LULC)数据集,包括九个类别的概率和标签信息。
动态世界的预测适用于2015-06-27至今的Sentinel-2 L1C集合。Sentinel-2的重访频率为2-5天,取决于纬度。动态世界预测是针对CLOUDY_PIXEL_PERCENTAGE<=35%的Sentinel-2 L1C图像生成的。预测结果被屏蔽,以去除云和云的阴影,使用S2云的概率、云的位移指数和方向距离变换的组合。
动态世界集合中的图像的名称与它们所来自的单个Sentinel-2 L1C资产名称一致,例如
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
有一个匹配的动态世界图像,名为:ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT') 。
除了 "标签 "带,所有的概率带总和为1。
要了解更多关于 "动态世界 "数据集的信息,并查看生成合成物、计算区域统计数据和处理时间序列的例子,请参见 "动态世界 "系列教程简介。
鉴于 "动态世界 "的等级估计是通过一个小的移动窗口的空间背景从单一的图像中得出的,因此,如果没有明显的区分特征,预测的土地覆盖物的top-1 "概率 "就会相对较低,这部分是由随时间变化的覆盖物定义的,比如农作物。干旱气候下的高回报率表面、沙子、太阳光等也可能表现出这种现象。
为了只选择有把握的属于动态世界类别的像素,建议通过对前1名预测的估计 "概率 "进行阈值处理来屏蔽动态世界输出。
Dataset Availability
2015-06-23T00:00:00 -
Dataset Provider
World Resources Institute Google
Collection Snippet
ee.ImageCollection("GOOGLE/DYNAMICWORLD/V1")
Resolution
10 meters
Bands Table
| Name | Description | Min | Max |
|---|---|---|---|
| water | Estimated probability of complete coverage by water | 0 | 1 |
| trees | Estimated probability of complete coverage by trees | 0 | 1 |
| grass | Estimated probability of complete coverage by grass | 0 | 1 |
| flooded_vegetation | Estimated probability of complete coverage by flooded vegetation | 0 | 1 |
| crops | Estimated probability of complete coverage by crops | 0 | 1 |
| shrub_and_scrub | Estimated probability of complete coverage by shrub and scrub | 0 | 1 |
| built | Estimated probability of complete coverage by built | 0 | 1 |
| bare | Estimated probability of complete coverage by bare | 0 | 1 |
| snow_and_ice | Estimated probability of complete coverage by snow and ice | 0 | 1 |
| label | Index of the band with the highest estimated probability | 0 | 8 |
Class Table: label
| Value | Color | Color Value | Description |
|---|---|---|---|
| 0 | #419BDF | water | |
| 1 | #397D49 | trees | |
| 2 | #88B053 | grass | |
| 3 | #7A87C6 | flooded_vegetation | |
| 4 | #E49635 | crops | |
| 5 | #DFC35A | shrub_and_scrub | |
| 6 | #C4281B | built | |
| 7 | #A59B8F | bare | |
| 8 | #B39FE1 | snow_and_ice |
属性:
| Name | Type | Description |
|---|---|---|
| dynamicworld_algorithm_version | String | The version string uniquely identifying the Dynamic World model and inference process used to produce the image. |
| qa_algorithm_version | String | The version string uniquely identifying the cloud masking process used to produce the image. |
其它官网链接APP:
App: https://www.dynamicworld.app
论文链接:
https://doi.org/10.1038/s41597-022-01307-4
代码:
-
// 构建一个相应的动态世界和Sentinel-2的集合,以供检查。按地区和日期过滤DW和S2的集合。
-
var COL_FILTER = ee.Filter.and(
-
ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)),
-
ee.Filter.date('2021-04-02', '2021-04-03'));
-
//两个数据集按照同样的结果进行筛选
-
var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(COL_FILTER);
-
var s2Col = ee.ImageCollection('COPERNICUS/S2').filter(COL_FILTER);
-
-
// 加入相应的DW和S2图像(通过系统:索引)。
-
var DwS2Col = ee.Join.saveFirst('s2_img').apply(dwCol, s2Col,
-
ee.Filter.equals({leftField: 'system:index', rightField: 'system:index'}));
-
-
// 提取一个DW图像的例子和它的来源S2图像。
-
var dwImage = ee.Image(DwS2Col.first());
-
var s2Image = ee.Image(dwImage.get('s2_img'));
-
-
//创建一个将DW类标签与概率相融合的可视化。定义DW LULC标签和颜色的列表对。
-
var CLASS_NAMES = [
-
'water', 'trees', 'grass', 'flooded_vegetation', 'crops',
-
'shrub_and_scrub', 'built', 'bare', 'snow_and_ice'];
-
-
var VIS_PALETTE = [
-
'419BDF', '397D49', '88B053', '7A87C6',
-
'E49635', 'DFC35A', 'C4281B', 'A59B8F',
-
'B39FE1'];
-
-
// 在[0, 1]上创建一个标签(最可能的类别)的RGB图像。
-
var dwRgb = dwImage
-
.select('label')
-
.visualize({min: 0, max: 8, palette: VIS_PALETTE})
-
.divide(255);
-
-
// 获得最可能的分类概率。
-
var top1Prob = dwImage.select(CLASS_NAMES).reduce(ee.Reducer.max());
-
-
// 在[0, 1]上创建一个最可能的类别概率的山形图。
-
var top1ProbHillshade =
-
ee.Terrain.hillshade(top1Prob.multiply(100))
-
.divide(255);
-
-
// 将RGB图像与丘陵地带结合起来。
-
var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade);
-
-
// 用源Sentinel-2图像显示动态世界的可视化。
-
Map.setCenter(20.6729, 52.4305, 12);
-
Map.addLayer(
-
s2Image,
-
{min: 0, max: 3000, bands: ['B4', 'B3', 'B2']},
-
'Sentinel-2 L1C');
-
Map.addLayer(
-
dwRgbHillshade,
-
{min: 0, max: 0.65},
-
'Dynamic World');
RGB影像
土地分类结果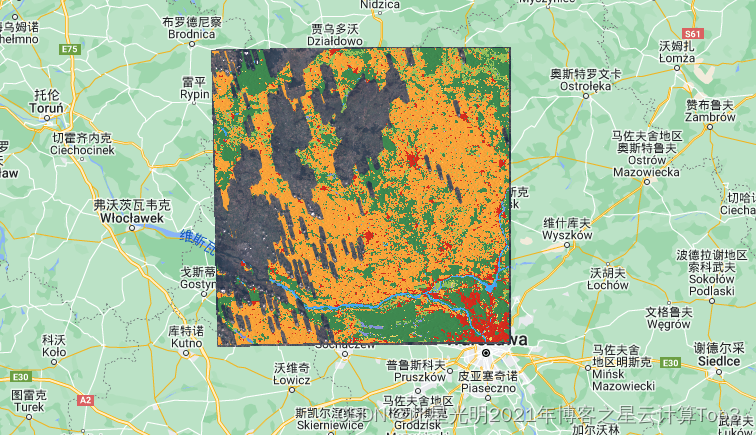
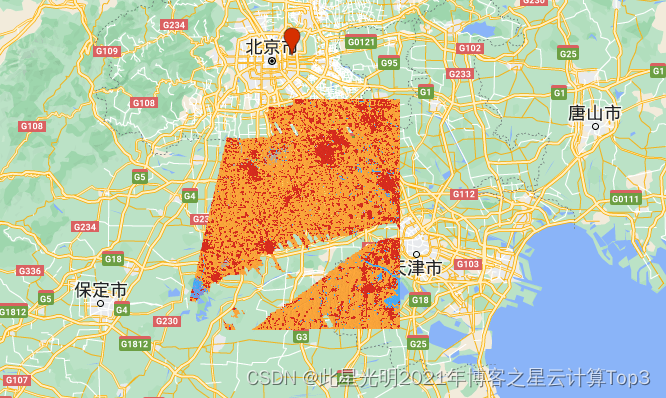
北京区域:
文章来源: blog.csdn.net,作者:此星光明2021年博客之星云计算Top3,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_31988139/article/details/125218621

- 点赞
- 收藏
- 关注作者
评论(0)