【图像分割】基于matlab超像素图像分割【含Matlab源码 720期】

【摘要】
一、图像分割简介
理论知识参考:【基础教程】基于matlab图像处理图像分割【含Matlab源码 191期】
二、部分源代码
% 能够确定超像素位置的核心程序是 EnforceLabelConne...
一、图像分割简介
理论知识参考:【基础教程】基于matlab图像处理图像分割【含Matlab源码 191期】
二、部分源代码
% 能够确定超像素位置的核心程序是 EnforceLabelConnectivity
% 11-123页码
clc
clear
close all;
tic
img = imread('bee.jpg');
imshow(img)
title('original')
%设定超像素个数
K = 500;
%设定超像素紧凑系数
m_compactness = 100;
%%
img = DeSample(img,2);
img_size = size(img);
%转换到LAB色彩空间
cform = makecform('srgb2lab'); %rgb空间转换成lab空间 matlab自带的用法,Create color transformation structure
img_Lab = applycform(img, cform); %rgb转换成lab空间
figure;
imshow(img_Lab)
title('img_lab')
%%
%得到超像素的LABXY种子点信息
img_sz = img_size(1)*img_size(2);
superpixel_sz = img_sz/K; % 每个超像素的像素点数
STEP = uint32(sqrt(superpixel_sz)); % 开方的边长
xstrips = uint32(img_size(2)/STEP); % x方向 的超像素个数
ystrips = uint32(img_size(1)/STEP); % y方向 的超像素个数
xstrips_adderr = double(img_size(2))/double(xstrips);
ystrips_adderr = double(img_size(1))/double(ystrips);
numseeds = xstrips*ystrips; % 实际的超像素个数
%种子点xy信息初始值为晶格中心亚像素坐标
%种子点Lab颜色信息为对应点最接近像素点的颜色通道值
kseedsx = zeros(numseeds, 1);
kseedsy = zeros(numseeds, 1);
kseedsl = zeros(numseeds, 1);
kseedsa = zeros(numseeds, 1);
kseedsb = zeros(numseeds, 1);
n = 1;
for y = 1: ystrips % 第y个超像素
for x = 1: xstrips % 第 x 个超像素
kseedsx(n, 1) = (double(x)-0.5)*xstrips_adderr; % 第x个种子点中心坐标,非准确描述
kseedsy(n, 1) = (double(y)-0.5)*ystrips_adderr; % 第y个种子点中心坐标,非准确描述
% 种子点中心对应LAB图上位置的 三通道值
kseedsl(n, 1) = img_Lab(fix(kseedsy(n, 1)), fix(kseedsx(n, 1)), 1); % fix 417.1296 变417
kseedsa(n, 1) = img_Lab(fix(kseedsy(n, 1)), fix(kseedsx(n, 1)), 2);
kseedsb(n, 1) = img_Lab(fix(kseedsy(n, 1)), fix(kseedsx(n, 1)), 3);
n = n+1;
end
end
n = 1;
%根据种子点计算超像素分区
klabels = PerformSuperpixelSLIC(img_Lab, kseedsl, kseedsa, kseedsb, kseedsx, kseedsy, STEP, m_compactness);
%合并小的分区
[supmtrx,supmtry,nlabels] = EnforceLabelC(img_Lab, klabels, K);
% 这里的supmtrx,supmtry的每列分别是对应标签区域的全部x坐标和y坐标
function klabels = PerformSuperpixelSLIC(img_Lab, kseedsl, kseedsa, kseedsb, kseedsx, kseedsy, STEP, compactness)
[m_height, m_width, m_channel] = size(img_Lab);
[numseeds xxxxx]= size(kseedsl);
img_Lab = double(img_Lab);
%像素标签格式为(x, y) (行, 列)
klabels = zeros(m_height, m_width);
%聚类尺寸
clustersize = zeros(numseeds,1);
inv = zeros(numseeds,1);
sigmal = zeros(numseeds,1);
sigmaa = zeros(numseeds,1);
sigmab = zeros(numseeds,1);
sigmax = zeros(numseeds,1);
sigmay = zeros(numseeds,1);
invwt = 1/( (double(STEP)/double(compactness)) *(double(STEP)/double(compactness)) );
%invwt = double(compactness)/double(STEP);
distvec = 100000*ones(m_height, m_width);
numk = numseeds;
for itr = 1: 10 %迭代次数
sigmal = zeros(numseeds, 1);
sigmaa = zeros(numseeds, 1);
sigmab = zeros(numseeds, 1);
sigmax = zeros(numseeds, 1);
sigmay = zeros(numseeds, 1);
clustersize = zeros(numseeds, 1);
inv = zeros(numseeds, 1);
distvec = double(100000*ones(m_height, m_width));
%根据当前种子点信息计算每一个像素的归属
for n = 1: numk
y1 = max(1, kseedsy(n, 1)-STEP);
y2 = min(m_height, kseedsy(n, 1)+STEP);
x1 = max(1, kseedsx(n, 1)-STEP);
x2 = min(m_width, kseedsx(n, 1)+STEP);
%按像素计算距离
for y = y1: y2
for x = x1: x2
%dist_lab = abs(img_Lab(y, x, 1)-kseedsl(n))+abs(img_Lab(y, x, 2)-kseedsa(n))+abs(img_Lab(y, x, 3)-kseedsb(n));
% lab图 点到种子点 定义距离差,判断相似度
dist_lab = (img_Lab(y, x, 1)-kseedsl(n, 1))^2+(img_Lab(y, x, 2)-kseedsa(n, 1))^2+(img_Lab(y, x, 3)-kseedsb(n, 1))^2;
% 改成平方啊 !!! @@@ !!! @@@ !!!
dist_xy = (double(y)-kseedsy(n, 1))*(double(y)-kseedsy(n, 1)) + (double(x)-kseedsx(n, 1))*(double(x)-kseedsx(n, 1));
%dist_xy = abs(y-kseedsy(n)) + abs(x-kseedsx(n));
%距离 = lab色彩空间距离 + 空间距离权重×空间距离
dist = dist_lab + dist_xy*invwt;
%在周围最多四个种子点中找到最相似的 标记后存入klabels
%m = (y-1)*m_width+x;
if (dist<distvec(y, x))
distvec(y, x) = dist; % 不断变小
klabels(y, x) = n; % n是标签,也就是值像素属于哪个种子点
end
end
end
end
%完成一遍分类后,重新计算种子点位置 使其向梯度最小地方移动
ind = 1;
for r = 1: m_height
for c = 1: m_width
sigmal(klabels(r, c),1) = sigmal(klabels(r, c),1)+img_Lab(r, c, 1); % 像素块内所有的通道值相加
sigmaa(klabels(r, c),1) = sigmaa(klabels(r, c),1)+img_Lab(r, c, 2);
sigmab(klabels(r, c),1) = sigmab(klabels(r, c),1)+img_Lab(r, c, 3);
sigmax(klabels(r, c),1) = sigmax(klabels(r, c),1)+c; % 像素块内所有的横坐标相加
sigmay(klabels(r, c),1) = sigmay(klabels(r, c),1)+r; % 像素块内所有的纵坐标相加
clustersize(klabels(r, c),1) = clustersize(klabels(r, c),1)+1; % 像素块内所有个数相加
end
end
for m = 1: numseeds % 第m个种子点
if (clustersize(m, 1)<=0)
clustersize(m, 1) = 1;
end
inv(m, 1) = 1/clustersize(m, 1);
end
function [supmtrx,supmtry,nlabels] = EnforceLabelC(img_Lab, labels, K)
dx = [-1, 0, 1, 0]; %四邻域
dy = [0, -1, 0, 1];
[m_height, m_width, m_channel] = size(img_Lab);
[M, N] = size(labels);
numlabel = max(max(labels));
SUPSZ = (m_height*m_width)/K; %标准区域面积
nlabels = (-1)*ones(M, N);
label = 1;
adjlabel = 1;
xvec = zeros(m_height*m_width, 1);
yvec = zeros(m_height*m_width, 1);
supmtrx = zeros(2*floor(SUPSZ), numlabel);
supmtry = zeros(2*floor(SUPSZ), numlabel);
m = 1;
n = 1;
for j = 1: m_height
for k = 1: m_width
%逐点寻找未标记的区域 小于0 才执行
if (0>nlabels(m, n))
%从第一个未标记的(m,n)起,确定一个新区域,用label标记该区域的起点,用蝶形前进
nlabels(m, n) = label;
%开始一个新的分割 记录起点坐标
xvec(1, 1) = k;
yvec(1, 1) = j;
supmtrx(1, label) = k;
supmtry(1, label) = j;
%如果起点与某个已知区域相连 用adjlabel记录该区域编号 如果当前区域过小则与相邻区域合并
for i = 1: 4
x = xvec(1, 1)+dx(1, i);
y = yvec(1, 1)+dy(1, i);
if (x>0 && x<=m_width && y>0 && y<=m_height)
if (nlabels(y, x)>0)
adjlabel = nlabels(y, x); % 一般是左临或上邻的标签
end
end
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
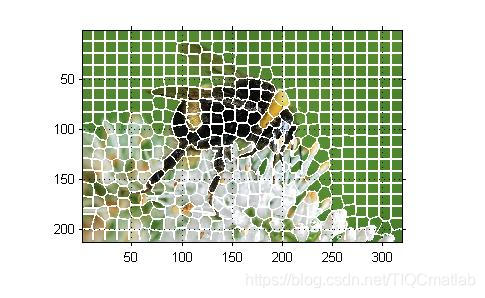
三、运行结果


四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 蔡利梅.MATLAB图像处理——理论、算法与实例分析[M].清华大学出版社,2020.
[2]杨丹,赵海滨,龙哲.MATLAB图像处理实例详解[M].清华大学出版社,2013.
[3]周品.MATLAB图像处理与图形用户界面设计[M].清华大学出版社,2013.
[4]刘成龙.精通MATLAB图像处理[M].清华大学出版社,2015.
[5]赵勇,方宗德,庞辉,王侃伟.基于量子粒子群优化算法的最小交叉熵多阈值图像分割[J].计算机应用研究. 2008,(04)
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/115475203

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)